一种柔性飞行器的起降轨迹规划方法
1.本发明属于无人机技术领域,具体涉及一种柔性飞行器的起降轨迹规划方法。
背景技术:
2.航迹规划是指不采用飞行器运动微分方程时,把飞行器当作一质点,在满足各种类约束条件下,规划出该飞行器从起点到终点的最优飞行航迹,使得各种类型的性能指标达到最优。超长航时无人机具有重要的应用价值和发展潜力。但面对日益提高的飞行任务要求,在应用新技术以扩大设计空间的同时,一些设计方案引起新的问题。这些新问题,主要表现在结构非线性、气动力非线性和结构弹性运动与全机刚体运动的耦合等方面。超长航时无人机由于具有较大的翼展,需要使用大量轻质结构,此类结构设计会导致飞机的柔性急剧增加,进而产生刚性和弹性耦合的现象,从而导致结构破坏或者失速。不仅如此,当无人机柔性结构的固有频率很低时,刚性运动会导致不稳定运动模态或较低刚体自由颤振速度,为该无人机的实际应用带来不利影响。
3.因此,本技术领域需要一种能够解决上述问题的柔性飞行器的起降轨迹规划方法。
技术实现要素:
4.为了解决上述现有技术中的问题,本发明的目的在于提供一种考虑飞机柔性的飞行器起降轨迹规划方法,该方法通过计算飞机柔性造成的气动影响,建立无人机最优控制,进而实现起降轨迹规划。
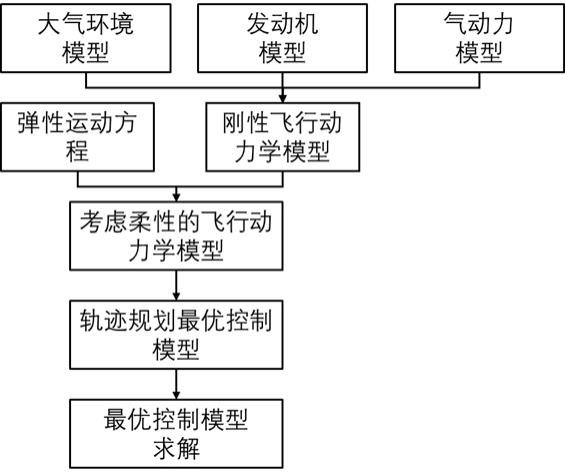
5.根据本发明的一个实施方式提供了一种柔性飞行器的起降轨迹规划方法,包括以下步骤:步骤一:建立柔性无人机的气动力模型、发动机模型、大气环境模型;步骤二:建立柔性无人机的飞行动力学模型;步骤三:建立柔性无人机的最优控制模型;步骤四:开展柔性无人机轨迹规划。
6.可选地,在根据本发明的另一个实施方式中,所述步骤一可进一步包括:建立无人机的结构模型,分析柔性无人机的结构模态以获得结构模态阶跃信号,将得到的结构模态阶跃信号作为输入信号,加载到气动网格模型中,计算各阶模态对应的广义气动力,进而得到气动状态空间模型;获得不同飞行速度、高度、马赫数、转子转速、及其他发动机特性对各阶段发动机耗油率的影响,建立大气温度
‑
高度分布和大气密度
‑
高度的数学模型。
7.可选地,在根据本发明的另一个实施方式中,所述步骤二可进一步包括:采用模态截断法对弹性运动方程进行降阶。弹性运动方程表达式如下,其中m是系统质量矩阵,c是系统阻尼矩阵,k是系统刚度矩阵,、、分别表示该系统位移、速度、加速度,t为时间。对于飞行动力学分析,一般只关心最低的若干
阶模态,基于模态坐标将使弹性运动方程的阶数降低,大大提高计算效率。结合弹性运动方程和刚性飞行力学模型,建立降雨影响的柔性无人机飞行动力学模型小扰动线化方程,将小扰动线化方程写成状态空间的形式,并带入气动导数,可得:,其中,a为状态矩阵,b为控制矩阵,x为状态变量, ẋ
为状态变量的导数,c为控制变量。
8.可选地,在根据本发明的另一个实施方式中,所述步骤三可进一步包括:以推力和舵偏角为控制变量,考虑控制变量的约束、离地速度约束、过载约束以及初始状态和末端状态的边值约束,以时间成本和燃油成本的线性组合作为目标函数,建立柔性无人机最优控制模型。
9.可选地,在根据本发明的另一个实施方式中,所述步骤四可进一步包括:基于遗传算法开展轨迹优化模型求解,选取起降轨迹关键点的高度和航迹倾角作为预定参数,进行编码,选取合适的种群规模进行种群初始化,以目标函数的倒数作为适应度函数,选取合适的进化代数作为终止条件,最终得到最优的起降轨迹。
10.与现有技术相比,根据本发明的实施方式所提供的柔性飞行器的起降轨迹规划方法大大提高了系统的运行和计算效率,保证了柔性飞行器飞行时具有稳定运动模态以及保持结构的稳定牢固;并且克服了现有技术中飞机的柔性增加进而产生刚性和弹性耦合的现象,从而导致结构破坏或者失速的问题,还克服了当无人机柔性结构的固有频率很低时,刚性运动会导致不稳定运动模态或较低刚体自由颤振速度的问题。
11.通过参考附图和以下说明,本发明的其它装置、设备、系统、方法、特征和优点将是明显的。包括在本说明书中的所有的另外的这种系统、方法、特征和优点都在本发明的范围内,且由所附权利要求保护。
附图说明
12.通过参考附图可更好地理解本发明。图中的构件不应视作按比例绘制,重点应放在示出本发明的原理上。
13.图1为根据本发明的一个实施方式提供的柔性飞行器的起降轨迹规划方法的流程图;图2为应用根据本发明的实施方式的一个示例性实施例的柔性飞行器的最优起飞轨迹图表;图3为应用根据本发明的实施方式的一个示例性实施例的柔性飞行器的最优降落轨迹图表。
具体实施方式
14.下面将参照附图更详细地描述本公开的示例性实施方式。虽然附图中显示了本公开的示例性实施方式,然而应当理解,可以以各种形式实现本公开而不应被这里阐述的实施方式所限制。相反,提供这些实施方式是为了能够更透彻地理解本公开,并且能够将本公开的范围完整的传达给本领域的技术人员。需要注意的是,除非另有说明,本发明使用的技术术语或者科学术语应当为本发明所属领域技术人员所理解的通常意义。
15.下面结合附图对根据本发明的实施方式所提供的柔性飞行器的起降轨迹规划方法进行详细说明。
16.图1为根据本发明的一个实施方式提供的柔性飞行器的起降轨迹规划方法的流程图。如图1所示,根据本发明的一个实施方式提供了一种柔性飞行器的起降轨迹规划方法,包括以下步骤:步骤一:建立柔性无人机的气动力模型、发动机模型、大气环境模型;步骤二:建立柔性无人机的飞行动力学模型;步骤三:建立柔性无人机的最优控制模型;步骤四:开展柔性无人机轨迹规划。
17.具体地,所述步骤一建立柔性无人机的气动力模型、发动机模型、大气环境模型,可包括建立柔性无人机的结构模型,分析柔性无人机的结构模态,将结构模态阶跃信号作为输入信号,加载到气动网格模型中,计算各阶模态对应的广义气动力,进而得到气动状态空间模型。建立不同状态下飞行速度、高度、马赫数、转子转速、及其他发动机特性对各阶段发动机耗油率的影响,建立大气温度
‑
高度分布和大气密度
‑
高度的数学模型。可选地,可通过拟合获取的实验数据来建立该大气温度
‑
高度分布和大气密度
‑
高度的数学模型。
18.此外,所述步骤二建立柔性无人机的飞行动力学模型可包括:采用模态截断法,可以很方便地对弹性运动方程进行降阶。弹性运动方程表达式如下,,其中m是系统质量矩阵,c是系统阻尼矩阵,k是系统刚度矩阵,、、分别表示该系统位移、速度、加速度,t为时间。对于飞行动力学分析,一般只关心最低的若干阶模态,基于模态坐标将使弹性运动方程的阶数降低,大大提高计算效率。结合弹性运动方程和刚性飞行力学模型,建立降雨影响的柔性无人机飞行动力学模型小扰动线化方程,将小扰动线化方程写成状态空间的形式,并带入气动导数,可得:其中,a为状态矩阵,b为控制矩阵,x为状态变量,c为控制变量, ẋ
为状态变量的导数。
19.具体地,步骤三建立柔性无人机的最优控制模型可包括:以推力和舵偏角为控制变量,考虑控制变量的约束、离地速度约束、过载约束以及初始状态和末端状态的边值约束,以时间成本和燃油成本的线性组合作为目标函数,建立柔性无人机最优控制模型。
20.此外,所述步骤四开展柔性无人机轨迹规划可包括:基于遗传算法开展轨迹优化模型求解,选取起降轨迹关键点的高度和航迹倾角作为预定参数,进行编码。在该示例性实施例中,可根据民航飞机实际飞行过程将飞机的爬升段分为两段,第一爬升段襟翼打开,平飞加速一段收起襟翼,开始第二段爬升。因此选取第一段爬升的终点和第二段爬升的起点和终点作为预定参数进行编码。选取合适的种群规模进行种群初始化,在本示例性实施例中,选取种群规模数量为100,以目标函数的倒数作为适应度函数,选取合适的进化代数作为终止条件,在本示例性实施例中设定为500,最终得到最优的起降轨迹。
21.图2为应用根据本发明的实施方式的一个示例性实施例的柔性飞行器的最优起飞轨迹图表。图3为应用根据本发明的实施方式的一个示例性实施例的柔性飞行器的最优降
落轨迹图表。
22.所属领域的技术人员可以清楚地了解到,为描述的方便和简洁,上述描述的系统、装置和单元的具体工作过程,可以参考前述方法实施例中的对应过程,在此不再赘述。
23.应理解,前述仅说明了一些实施方式,可进行改变、修改、增加和/或变化而不偏离所公开的实施方式的范围和实质,该实施方式是示意性的而不是限制性的。此外,所说明的实施方式涉及当前考虑为最实用和最优选的实施方式,其应理解为实施方式不应限于所公开的实施方式,相反地,旨在覆盖包括在该实施方式的实质和范围内的不同的修改和等同设置。此外,上述说明的多种实施方式可与其它实施方式共同应用,如,一个实施方式的方面可与另一个实施方式的方面结合而实现再另一个实施方式。另外,任何给定组件的各独立特征或构件可构成另外的实施方式。
24.以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围,其均应涵盖在本发明的权利要求和说明书的范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1