无人机的控制方法、装置、设备及可读存储介质与流程
本技术实施例涉及数据处理,特别涉及一种无人机的控制方法、装置、设备及可读存储介质。
背景技术:
1、无人机是一种利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机。随着无人机技术的逐渐成熟,无人机被越来越多的应用在配送场景、高空摄影场景中等。
2、相关技术中,在控制无人机的飞行时,需要基于无人机内置的卫星导航芯片如全球导航卫星系统(global navigation satellite system,gnss)等,获取无人机的位置数据,基于摄像机等获取到视觉定位信息。之后,基于无人机的位置数据以及视觉定位信息,控制无人机的飞行,无人机的飞行包括但不限于起飞、降落、按照飞行航线进行飞行等。
3、然而,基于摄像机等获取视觉定位信息时容易受到雨、雪、光照等天气因素的影响,导致无人机的控制精度不高,飞行安全性较差。
技术实现思路
1、本技术实施例提供了一种无人机的控制方法、装置、设备及可读存储介质,可用于解决相关技术中的问题,所述技术方案包括如下内容。
2、一方面,本技术实施例提供了一种无人机的控制方法,所述方法包括:
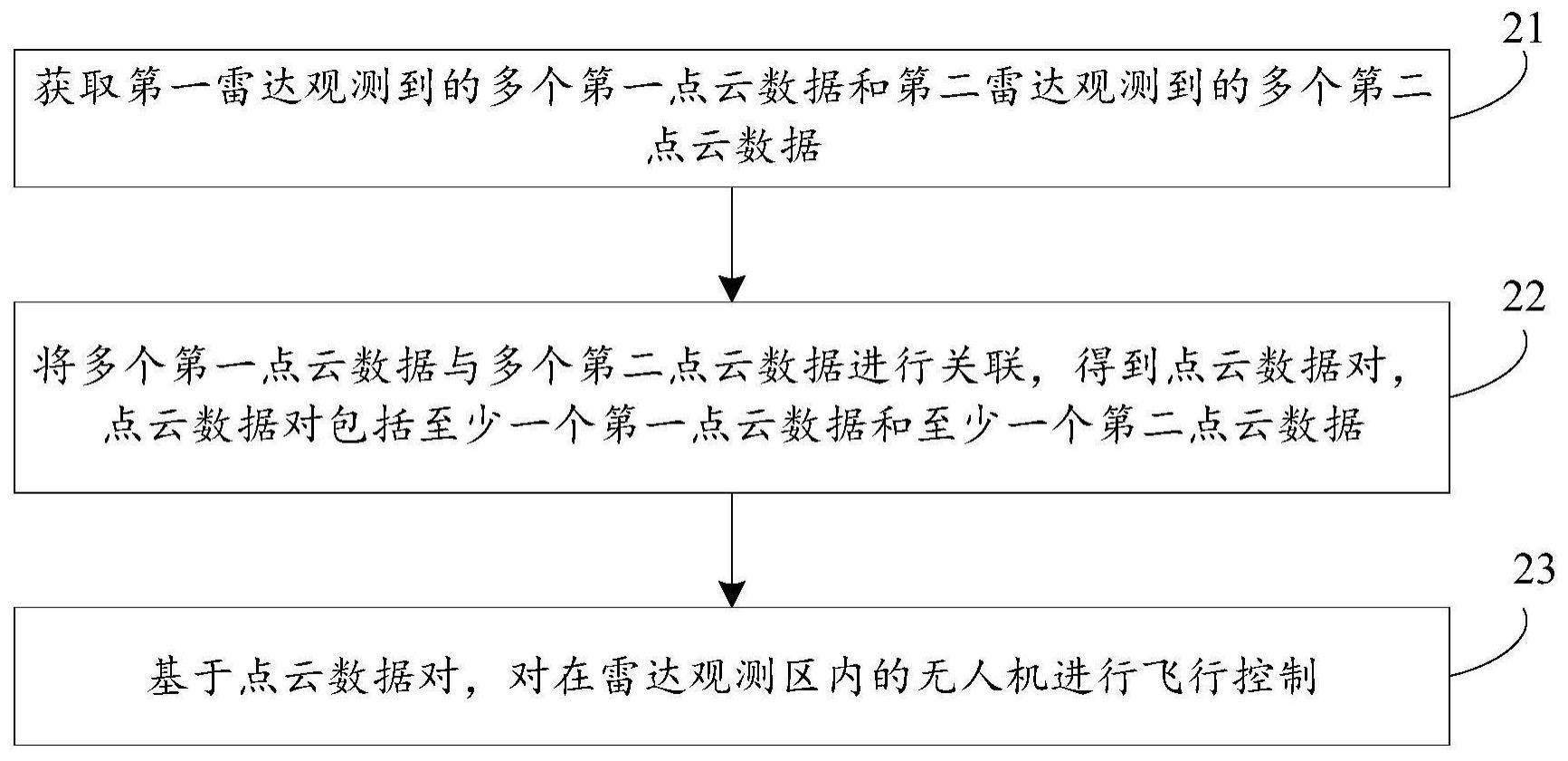
3、获取第一雷达观测到的多个第一点云数据和第二雷达观测到的多个第二点云数据;
4、将所述多个第一点云数据与所述多个第二点云数据进行关联,得到点云数据对,所述点云数据对包括至少一个第一点云数据和至少一个第二点云数据;
5、基于所述点云数据对,对在雷达观测区内的无人机进行飞行控制。
6、在一种可能的实现方式中,所述将所述多个第一点云数据与所述多个第二点云数据进行关联,得到点云数据对,包括:
7、对所述多个第一点云数据进行聚类处理,得到至少一个第一数据集;
8、对所述多个第二点云数据进行聚类处理,得到至少一个第二数据集;
9、将所述至少一个第一数据集与所述至少一个第二数据集进行关联,得到所述点云数据对。
10、在一种可能的实现方式中,所述对所述多个第一点云数据进行聚类处理,得到至少一个第一数据集,包括:
11、从所述多个第一点云数据中筛选出多个目标点云数据;
12、对所述多个目标点云数据进行聚类处理,得到所述至少一个第一数据集。
13、在一种可能的实现方式中,所述从所述多个第一点云数据中筛选出多个目标点云数据,包括以下至少一项:
14、基于所述多个第一点云数据各自包含的速度数据,从所述多个第一点云数据中筛选出速度数据小于或者等于目标速度的目标点云数据;
15、基于所述多个第一点云数据各自包含的回波强度数据,从所述多个第一点云数据中筛选出回波强度数据大于或者等于目标回波强度的目标点云数据;
16、基于所述多个第一点云数据各自包含的斜距数据,从所述多个第一点云数据中筛选出斜距数据大于或者等于目标斜距的目标点云数据;
17、基于所述多个第一点云数据各自包含的角度数据,从所述多个第一点云数据中筛选出角度数据小于或者等于目标角度的目标点云数据。
18、在一种可能的实现方式中,所述对所述多个目标点云数据进行聚类处理,得到所述至少一个第一数据集,包括:
19、基于所述多个目标点云数据各自包含的斜距数据,计算每两个目标点云数据之间的斜距差;
20、基于所述每两个目标点云数据之间的斜距差,对所述多个目标点云数据进行聚类处理,得到所述至少一个第一数据集,所述第一数据集中任意两个目标点云数据之间的斜距差小于或者等于第一阈值。
21、在一种可能的实现方式中,所述将所述至少一个第一数据集与所述至少一个第二数据集进行关联,得到所述点云数据对,包括:
22、确定各个第一数据集的中心斜距,确定各个第二数据集的中心斜距;
23、基于所述各个第一数据集的中心斜距和所述各个第二数据集的中心斜距,计算第一数据集和第二数据集之间所对应的斜距差;
24、基于所述第一数据集和第二数据集之间所对应的斜距差,对所述至少一个第一数据集与所述至少一个第二数据集进行关联,得到所述点云数据对,所述点云数据对中的第一数据集和第二数据集之间的斜距差小于或者等于第二阈值。
25、在一种可能的实现方式中,所述确定各个第一数据集的中心斜距,包括:
26、基于所述各个第一数据集中的各个第一点云数据各自所包含的斜距数据,计算所述各个第一数据集中的各个第一点云数据的斜距平均值,得到所述各个第一数据集的中心斜距。
27、在一种可能的实现方式中,所述点云数据对的数量为多个,任意一个点云数据对是当前时刻对应的点云数据对;
28、所述基于所述位置数据和所述点云数据对,对在雷达观测区内的无人机进行飞行控制,包括:
29、基于上一时刻对应的点云数据对确定上一时刻的运动状态数据,所述运动状态数据是点云数据对在直角坐标系所对应的数据;
30、基于所述上一时刻的运动状态数据,从当前时刻对应的多个点云数据对中,确定出至少一个待筛选数据;
31、基于所述至少一个待筛选数据,对在雷达观测区内的无人机进行飞行控制。
32、在一种可能的实现方式中,所述基于所述上一时刻的运动状态数据,从当前时刻对应的多个点云数据对中,确定出至少一个待筛选数据,包括:
33、基于所述上一时刻的运动状态数据,预测得到当前时刻对应的第一运动状态数据;
34、基于当前时刻对应的各个点云数据对,确定当前时刻对应的各个第二运动状态数据;
35、基于所述第一运动状态数据,从所述各个第二运动状态数据中确定出至少一个待筛选数据。
36、在一种可能的实现方式中,所述基于所述至少一个待筛选数据,对在雷达观测区内的无人机进行飞行控制,包括:
37、获取无人机的位置数据;
38、基于所述至少一个待筛选数据和所述位置数据,对在雷达观测区内的无人机进行飞行控制。
39、在一种可能的实现方式中,所述基于所述至少一个待筛选数据和所述位置数据,对在雷达观测区内的无人机进行飞行控制,包括:
40、基于所述至少一个待筛选数据和所述位置数据,确定各个待筛选数据所对应的距离数据,所述待筛选数据所对应的距离数据用于表征所述待筛选数据所对应的对象与所述无人机之间的距离;
41、基于所述各个待筛选数据所对应的距离数据,从所述至少一个待筛选数据中筛选出距离数据小于或者等于目标距离的目标数据;
42、基于所述目标数据,对在雷达观测区内的无人机进行飞行控制。
43、在一种可能的实现方式中,所述第一雷达和所述第二雷达的雷达波束平面垂直,所述第一雷达包括至少两个贴片天线,所述第二雷达包括至少两个贴片天线。
44、另一方面,本技术实施例提供了一种无人机的控制装置,所述装置包括:
45、获取模块,用于获取第一雷达观测到的多个第一点云数据和第二雷达观测到的多个第二点云数据;
46、关联模块,用于将所述多个第一点云数据与所述多个第二点云数据进行关联,得到点云数据对,所述点云数据对包括至少一个第一点云数据和至少一个第二点云数据;
47、控制模块,用于基于所述点云数据对,对在雷达观测区内的无人机进行飞行控制。
48、在一种可能的实现方式中,所述关联模块,用于对所述多个第一点云数据进行聚类处理,得到至少一个第一数据集;对所述多个第二点云数据进行聚类处理,得到至少一个第二数据集;将所述至少一个第一数据集与所述至少一个第二数据集进行关联,得到所述点云数据对。
49、在一种可能的实现方式中,所述关联模块,用于从所述多个第一点云数据中筛选出多个目标点云数据;对所述多个目标点云数据进行聚类处理,得到所述至少一个第一数据集。
50、在一种可能的实现方式中,所述关联模块,用于以下至少一项:
51、基于所述多个第一点云数据各自包含的速度数据,从所述多个第一点云数据中筛选出速度数据小于或者等于目标速度的目标点云数据;
52、基于所述多个第一点云数据各自包含的回波强度数据,从所述多个第一点云数据中筛选出回波强度数据大于或者等于目标回波强度的目标点云数据;
53、基于所述多个第一点云数据各自包含的斜距数据,从所述多个第一点云数据中筛选出斜距数据大于或者等于目标斜距的目标点云数据;
54、基于所述多个第一点云数据各自包含的角度数据,从所述多个第一点云数据中筛选出角度数据小于或者等于目标角度的目标点云数据。
55、在一种可能的实现方式中,所述关联模块,用于基于所述多个目标点云数据各自包含的斜距数据,计算每两个目标点云数据之间的斜距差;基于所述每两个目标点云数据之间的斜距差,对所述多个目标点云数据进行聚类处理,得到所述至少一个第一数据集,所述第一数据集中任意两个目标点云数据之间的斜距差小于或者等于第一阈值。
56、在一种可能的实现方式中,所述关联模块,用于确定各个第一数据集的中心斜距,确定各个第二数据集的中心斜距;基于所述各个第一数据集的中心斜距和所述各个第二数据集的中心斜距,计算第一数据集和第二数据集之间所对应的斜距差;基于所述第一数据集和第二数据集之间所对应的斜距差,对所述至少一个第一数据集与所述至少一个第二数据集进行关联,得到所述点云数据对,所述点云数据对中的第一数据集和第二数据集之间的斜距差小于或者等于第二阈值。
57、在一种可能的实现方式中,所述关联模块,用于基于所述各个第一数据集中的各个第一点云数据各自所包含的斜距数据,计算所述各个第一数据集中的各个第一点云数据的斜距平均值,得到所述各个第一数据集的中心斜距。
58、在一种可能的实现方式中,所述点云数据对的数量为多个,任意一个点云数据对是当前时刻对应的点云数据对;
59、所述控制模块,用于基于上一时刻对应的点云数据对确定上一时刻的运动状态数据,所述运动状态数据是点云数据对在直角坐标系所对应的数据;基于所述上一时刻的运动状态数据,从当前时刻对应的多个点云数据对中,确定出至少一个待筛选数据;基于所述至少一个待筛选数据,对在雷达观测区内的无人机进行飞行控制。
60、在一种可能的实现方式中,所述控制模块,用于基于所述上一时刻的运动状态数据,预测得到当前时刻对应的第一运动状态数据;基于当前时刻对应的各个点云数据对,确定当前时刻对应的各个第二运动状态数据;基于所述第一运动状态数据,从所述各个第二运动状态数据中确定出至少一个待筛选数据。
61、在一种可能的实现方式中,所述控制模块,用于获取无人机的位置数据;基于所述至少一个待筛选数据和所述位置数据,对在雷达观测区内的无人机进行飞行控制。
62、在一种可能的实现方式中,所述控制模块,用于基于所述至少一个待筛选数据和所述位置数据,确定各个待筛选数据所对应的距离数据,所述待筛选数据所对应的距离数据用于表征所述待筛选数据所对应的对象与所述无人机之间的距离;基于所述各个待筛选数据所对应的距离数据,从所述至少一个待筛选数据中筛选出距离数据小于或者等于目标距离的目标数据;基于所述目标数据,对在雷达观测区内的无人机进行飞行控制。
63、在一种可能的实现方式中,所述第一雷达和所述第二雷达的雷达波束平面垂直,所述第一雷达包括至少两个贴片天线,所述第二雷达包括至少两个贴片天线。
64、另一方面,本技术实施例提供了一种电子设备,所述电子设备包括处理器和存储器,所述存储器中存储有至少一条程序代码,所述至少一条程序代码由所述处理器加载并执行,以使所述电子设备实现上述任一所述的无人机的控制方法。
65、另一方面,还提供了一种计算机可读存储介质,所述计算机可读存储介质中存储有至少一条程序代码,所述至少一条程序代码由处理器加载并执行,以使计算机实现上述任一所述的无人机的控制方法。
66、另一方面,还提供了一种计算机程序或计算机程序产品,所述计算机程序或计算机程序产品中存储有至少一条计算机指令,所述至少一条计算机指令由处理器加载并执行,以使计算机实现上述任一种无人机的控制方法。
67、本技术实施例提供的技术方案至少带来如下有益效果:
68、本技术实施例提供的技术方案基于多个第一点云数据与多个第二点云数据所关联形成的点云数据对,对在雷达观测区内的无人机进行飞行控制。由于点云数据是依靠雷达获取的,不会受到雨、雪、光照等天气因素的影响,且数据准确性较高,因此,基于点云数据控制无人机飞行时,提高了无人机的控制精度,从而提高了飞行安全性。
- 还没有人留言评论。精彩留言会获得点赞!