无人艇运动控制抗扰控制器及方法与流程
1.本发明属于无人艇控制领域,涉及无人艇操控系统,具体是一种无人艇运动控制抗扰控制器及方法。
背景技术:
2.近年来,应用自主驾驶技术的无人水面艇受到广泛重视,处于高速发展阶段。特别是随着无人艇广泛地应用于民用领域和军用领域,如水质监测、测量测绘、警戒巡逻、火力打击等,无人艇载航行过程中通常会遇到船舶通航密度大、航道弯曲、浅窄航段较多、气象和水文条件复杂等情形。为保证无人艇航行的稳定性和安全性,要求无人艇载航向控制方面,具备很高的机动性和鲁棒性。
3.为达到上述水面无人艇运动控制的目标,当前各国相关研究人员设置了多种控制算法,大致有比例积分控制(pid)、自适应控制、模糊控制、人工神经网络控制、滑模控制等,但是每种控制算法在特定环境下都有各自的缺陷,比如pid在对海浪高频干扰的处理时,容易导致控制系统低频特性恶化,产生持续的周期性偏航,降低航行精度,增加燃料消耗;自适应控制对于船舶在风浪中航行,当缓变干扰与突变干扰同时存在时,其航向自动舵的鲁棒性较差。
技术实现要素:
4.本发明的目的在于提供一种无人艇运动控制抗扰控制器及方法,本发明拥有较高的鲁棒性。
5.为实现上述目的,本发明提供如下技术方案:
6.一种无人艇运动控制抗扰控制器,包括被控usv模型,其特征在于:将整个控制器分为两部分:航速控制和航向控制;
7.航速控制部分包括td滤波过渡器、航速自抗扰控制器和eso状态观测器;所述td滤波过渡器的输入端输入航速信号,输出端与航速自抗扰控制器的输入端连接,所述航速自抗扰控制器的输出端分别与eso状态观测器和被控usv模型连接,所述被控usv模型的航速信号输出端与eso状态观测器的输入端连接,所述eso状态观测器的输出端分别与航速自抗扰控制器的输入端和输出端连接;
8.航向控制部分包括td滤波过渡器、航向自抗扰控制器和eso状态观测器;所述td滤波过渡器的输入端输入航速信号,输出端与航速自抗扰控制器的输入端连接,所述航速自抗扰控制器的输出端分别与eso状态观测器和被控usv模型连接,所述被控usv模型的航速信号输出端与eso状态观测器的输入端连接,所述eso状态观测器的输出端分别与航速自抗扰控制器的输入端和输出端连接。
9.进一步地,所述被控usv模型为欠驱动水面船舶数学模型。
10.进一步地,所述td滤波过渡器为跟踪微分器。
11.进一步地,所述航速自抗扰控制器和航向自抗扰控制器均为非线性状态误差反馈
律。
12.进一步地,所述eso状态观测器为扩张状态观测器。
13.一种无人艇运动控制抗扰控制方法,其特征在于:
14.建立无人艇的欠驱动水面船舶数学模型,将欠驱动水面船舶数学模型的输入和输出均分为航速和航向,对航速和航向的控制方式相同,包括:
15.向跟踪微分器输入航速/航向目标,经过跟踪微分器处理后输出目标信号和目标信号的微分信号,所述目标信号和目标信号的微分信号分别减去所述扩张状态观测器观察出来的目标信号和目标信号的微分信号,再输入到非线性状态误差反馈律,非线性状态误差反馈律输出控制参数,所述控制参数减去所述扩张状态观测器观测出来的总系统扰动得到最终控制参数,所述最终控制参数分别输入给扩张状态观测器和欠驱动水面船舶数学模型,所述欠驱动水面船舶数学模型将输出的航速/航向输入给对应的扩张状态观测器,所述扩张状态观测器的输出包括观察出来的目标信号、目标信号的微分信号和总系统扰动。
16.进一步地,在非线性状态误差反馈律输出的控制参数转换为最终控制参数的过程中引入一个预设系数,用于调整输出结果;所述控制参数先减去总系统扰动,再除以所述预设系数,得到最终控制参数。
17.与现有技术相比,本发明的有益效果如下:本发明设计了非线性鲁棒控制器(鲁棒性是在异常和危险情况下系统生存的能力),利用跟踪微分器(td)、扩张状态观测器(eso)和非线性状态误差反馈律(nlsef)来组合构成无人艇运动控制系统。根据无人艇运动学方程及动力学方程,并选取相关船型参数,搭建无人艇运动控制微分方程模型,验证自抗扰控制方法效果。
附图说明
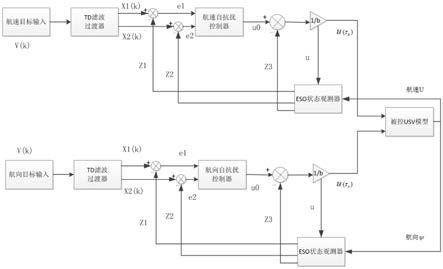
18.图1是无人艇运动控制抗扰控制器流程框图。
19.图2是本发明所使用自抗扰控制器仿真时航向跟踪效果。
20.图3是本发明所使用自抗扰控制器仿真时航速跟踪效果。
21.图4是无人艇运动学方程及动力学方程建立时双坐标系对比关系。
具体实施方式
22.下面将结合具体实施例对本发明实施例中的技术方案进行清楚、完整地描述。显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
23.无人艇需要在海况复杂的情况下出海巡航或者执行相关任务,传统的线性运动控制方法受到模型不确定性及风浪流的干扰,收敛效果不稳定。本方案的一种无人艇运动控制抗扰控制器及方法,将adrc技术与无人艇运动控制相结合,进而设计非线性模型预测控制器,能够改善线性运动控制方法鲁棒性不够、易受外界干扰的问题。如图1所示,具体实施方式如下:
24.无人艇运动控制抗扰控制器,如图1所示,包括欠驱动水面船舶数学模型,将整个控制器分为两部分,分别进行航速控制和航向控制。
25.航速控制部分包括跟踪微分器、航速自抗扰控制器和扩张状态观测器;所述跟踪微分器的输入端输入航速信号,输出端与航速自抗扰控制器的输入端连接,所述航速自抗扰控制器的输出端分别与扩张状态观测器和欠驱动水面船舶数学模型连接,所述欠驱动水面船舶数学模型的航速信号输出端与扩张状态观测器的输入端连接,所述扩张状态观测器的输出端分别与航速自抗扰控制器的输入端和输出端连接。
26.航向控制部分包括跟踪微分器、航向自抗扰控制器和扩张状态观测器;所述跟踪微分器的输入端输入航速信号,输出端与航速自抗扰控制器的输入端连接,所述航速自抗扰控制器的输出端分别与扩张状态观测器和欠驱动水面船舶数学模型连接,所述欠驱动水面船舶数学模型的航速信号输出端与扩张状态观测器的输入端连接,所述扩张状态观测器的输出端分别与航速自抗扰控制器的输入端和输出端连接。
27.所述航速自抗扰控制器和航向自抗扰控制器均为非线性状态误差反馈律。
28.无人艇运动控制抗扰控制过程包括:建立无人艇的欠驱动水面船舶数学模型,将欠驱动水面船舶数学模型的输入和输出均分为航速和航向,对航速和航向的控制方式相同,包括:向跟踪微分器输入航速/航向目标,经过跟踪微分器处理后输出目标信号和目标信号的微分信号,所述目标信号和目标信号的微分信号分别减去所述扩张状态观测器观察出来的目标信号和目标信号的微分信号,再输入到非线性状态误差反馈律,非线性状态误差反馈律输出控制参数u0,所述控制参数u0减去所述扩张状态观测器观测出来的总系统扰动得到最终控制参数(u和u(τu),两者相等),所述最终控制参数分别输入给扩张状态观测器(u)和欠驱动水面船舶数学模型(u(τu)),所述欠驱动水面船舶数学模型将输出的航速/航向输入给对应的扩张状态观测器,所述扩张状态观测器的输出包括观察出来的目标信号、目标信号的微分信号和总系统扰动。作为优秀方案,在非线性状态误差反馈律输出的控制参数转换为最终控制参数的过程中引入一个预设系数b,用于调整输出结果;所述控制参数先减去总系统扰动,再除以所述预设系数b,得到最终控制参数。
29.具体包括:
30.一、建立无人艇的欠驱动水面船舶数学模型
31.主要分为运动学模型和动力学模型两部分,运动学模型描述船舶运动的几何特征,动力学模型对引起船舶运动的力和力矩进行分析。然后建立风、浪、流引起的环境干扰数学模型,通过综合分析建立欠驱动水面船舶数学模型,如图4。
32.定义η=[η1,η2]
t
为船舶在惯性坐标系下的位置和方向,其中η1=[x,y,z]
t
,η2=[φ,θ,ψ]
t
。
[0033]
定义υ=[υ1,υ2]
t
为船舶在船舶附体坐标系下的船舶的线速度和角速度,其中υ1=[u,v,w]
t
,υ2=[p,q,r]
t
。
[0034]
定义τ=[τ1,τ2]
t
为船舶在船舶附体坐标系下作用在船舶上的力和力矩,其中τ1=[x,y,z]
t
代表的是船舶在附体坐标系三个轴方向上所受到的力,τ2=[k,m,n]
t
代表的是船舶在附体坐标系中三个方向所受到的力矩。
[0035]
下表是无人艇运动学方程及动力学方程建立时各符号含义。
[0036][0037][0038]
是六自由度的船舶运动学模型。
[0039]
表示船舶的动力学模型。
[0040]
其中,矩阵m包括:m
rb
代表刚体惯性矩阵,和ma代表流体惯性附加质量矩阵。
[0041]
矩阵c包括:c
rb
(υ)代表刚体的科里奥利和向心力矩阵,和ca(υ)代表流体动力学科里奥利和向心力矩阵。
[0042]
g(η)代表由位置和方向决定的回复力和回复力矩。
[0043]
最终简化为三自由度的水平面船舶模型(忽略风、浪、流引起的环境干扰)。
[0044]
如果需要考虑风浪流的干扰,则在bf位置添加τe所带来的影响,τe为风、浪、流引起的环境干扰矩阵;化简得出无人艇的欠驱动水面船舶数学模型,如下。
[0045][0046]
其中,τu和τr作为无人艇模型的纵向输入力矩和转向偏转力矩。x yψu v r分别代
表无人艇在大地坐标系中x轴的位置坐标、y轴的位置坐标、航向角、纵向运动速度、横向运动速度、艏向角变化角速度。其余的变量(m11、m22、m33)均为无人艇固有的一些相关参数,通过操纵实验,回转实验后的实验数据参数辨识得到。
[0047]
二、跟踪微分器的过渡过程安排;
[0048][0049]
跟踪微分器对目标的航向或者航速信号v(k)安排过渡过程,采用二阶最速综合函数fhan,可以避免突然的节约信号所代来的系统输出严重滞后问题,并得到目标输入信号的过滤信号以及其近似微分信号。
[0050]
上述公式采用的是离散化的跟踪微分器,v(k)代表根据los方法或者其他路径规划方法得到的航向或者航速目标信号;x1代表的是滤波后得到的航向/航速目标信号,x2代表的是近似的航向/航速目标信号的微分信号。r0和h0作为系统控制参数,与系统采样时间步长和过滤过程快慢有关,人工进行调整。
[0051]
步骤三、扩张状态观测器扩张状态观测过程;
[0052][0053]
扩张状态观测器将总扰动扩张成系统的一个新的状态变量,然后利用系统的输入、输出重构(也就是观测)出包含系统原有状态变量和扰动的所有状态。
[0054]
y(k)为系统实际输出;z1(k)为观测出来的航速/航向信号输出;z2(k)为观测出来的系统航速/航向信号的微分信号;z3(k)为观测出来的总的系统扰动。ε1代表的是观测偏差,为系统观测输出和实际输出的差值;h为系统离散化过程中的采样周期;β
01
β
02
β
03
为系统控制参数,一般与观测器的带宽有关,根据采用步长决定;δ为系统控制参数,一般5h≤δ≤10h;fal为非线性观测函数;
[0055]
步骤四、非线性状态误差反馈律(nlsef):
[0056][0057]
非线性状态误差反馈律其实就是在传统pid控制方法上的改进。通过跟踪微分器及其产生的过渡过程,可以跟踪误差信号。利用误差信号e1和误差微分信号e2,可以生成误差积分信号e0,就可以采用传统pid控制方法;但是针对无人艇这种滞后大,受外界干扰明
显的非线性系统,线性pid控制方法很难取得较好的控制效果,所以采用非线性控制组合,且干扰扰动在eso扩张状态观测中进行了观测和补偿,所以可以忽略积分项。
[0058]
其中fal为非线性函数,β1、β2为系统的比例和微分控制系数,α1、α2为系统的控制参数且一般0<α1<1<α2;δ为系统的控制参数,一般5h≤δ≤10h;u即是控制器最终的控制输出,作用于系统运动学及动力学数学模型上。
[0059]
上述一二三四的关系参考图1,将整个系统的闭环流程规划完毕,形成闭环反馈控制系统;并通过simulink仿真搭建系统模型,离散化仿真获得航向跟踪曲线及航速跟踪曲线如附图2、3所示(目标航速为10kn/15kn节约信号,目标航向为30
°
/70
°
阶跃跳变信号)。
[0060]
本方案提出利用跟踪微分器(td)、扩张状态观测器(eso)和非线性状态误差反馈(nlsef)来组合构成无人艇运动控制系统,根据无人艇运动学方程及动力学方程,搭建无人艇运动控制微分方程模型,验证自抗扰控制方法效果。
[0061]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1