一种移动场景下的俯仰角稳定平台
1.本发明属于水平控制技术领域,具体涉及一种移动场景下的俯仰角稳定平台。
背景技术:
2.在无人机、车辆等移动场景下,通常需要安装一些任务载荷,部分任务载荷对于工作平台的水平性有较高的要求。然而,很多移动场景受周边各种因素以及自身因素的影响,很难维持整体的水平条件。例如,无人机飞行过程中受风力影响以及自身俯仰运动的需要,车辆颠簸转弯等情况难免造成内部任务载荷的俯仰角变化,水平性因此受到影响,从而影响预定任务的实现精度。而稳定平台则可以在移动场景下,维持所受负载面的局部水平,为特定任务的实现提供稳定性保障。
3.现有的检测俯仰角变化并维持平台承载面水平性的手段大多分为以下几种:1、通过液体内液泡的位移来反应平台俯仰角的变化从而对平台的水平性做出调整,使液泡的位置还原。该方法工作原理简单、结构容易实现,但是只适用于静态或者匀速运动环境下的平台调整。如果处于加速移动条件下,即使平台依然水平,但是受惯性力的影响,液泡依然会发生位移,造成控制系统误判。
4.2、通过陀螺仪检测角速度瞬时值,并与时间积分计算角度变化量,传输给控制系统,让其对角度变化值进行补偿。该方法精度高、响应快,但是普通的陀螺仪容易受各种不可避免的因素干扰,例如外界温度、瞬间大电流、电磁干扰等现象都会导致陀螺仪产生误差,并且误差从初对准开始就会随时间增长。而采用精度更高的陀螺仪,例如光纤陀螺仪、环形激光陀螺仪、工业级mems陀螺仪,会大大提高成本,只适用于潜艇、飞机和航天器这种工业级别的设备上,并不能满足普通场合的动态维稳需要。
5.3、基于gps接收机定位出gps在ecef坐标系下的位置,通过坐标转换,得到各个gps接收机的enu坐标,并与在enu坐标系下的初始化坐标进行对比,计算出角度的变化量,从而让控制系统实现俯仰角的补偿维持工作载荷的水平。该方法成本低廉,避免了温度、磁场等因素所带来的精度降低等问题。但是该方法无法对平台的角度变化做到实时性测量,并且受所在位置信号强度影响较大。一旦所处环境信号弱或者接受不到信号,gps接受信号的时间延迟将增长甚至导致方法失效。
技术实现要素:
6.本发明的目的在于针对变速的移动场景,抵消惯性力带来的检测误判,在避免温度、磁场、信号强弱等因素带来影响的条件下,提供了一种工作原理简单、成本低廉、限制因素少、适用于多种场合的俯仰角稳定平台。
7.本发明提供的移动场景下的俯仰角稳定平台,包括承载面、测量组件、控制调整组件、连接组件和底座;其中,所述承载面和测量组件固连,用于放置所需的任何载荷;所述测量组件用于获得平台的俯仰角变化信息;所述连接组件具有两个旋转自由度,连接组件有4个,设置于测量组件与底座的之间的四角处;所述控制调整组件接收上部测量组件的俯仰
角变化信息,通过调节控制,维持测量组件和承载面稳定的水平状态;底座可固定于移动场景下的承载面上,例如行进的车辆、飞行的无人机等。
8.本发明中,所述测量组件包括:载重平台、牛眼轮、平衡锤和感应筒,其中:所述载重平台,中心有半球状凹槽,用于容纳平衡锤的上部分;半球状凹槽上还设置有以轴线为中心,均匀分布的圆柱阶梯状凹槽,用于放置牛眼轮;所述牛眼轮,放置于载重平台的圆柱阶梯状凹槽内,伸出的球体高于半球状凹槽的表面,支持各个方向的滚动并与平衡锤的上部分接触,避免平衡锤的上部分与载重平台的凹槽直接接触,变滑动摩擦为滚动摩擦,进一步减小平衡锤在载重平台内的活动阻力;所述平衡锤,分为上球和下摆两部分;上球是一个球体截取的一部分,上球面的曲率中心位于载重平台半球凹槽的球心并且弧面半径小于半球凹槽的半径,上球的弧面与牛眼轮的球体相接触,并且和半球凹槽的表面保持一段距离;下摆四周缠上感应片,伸入下部感应筒的导向槽中;其中平衡锤需要做到“头重脚轻”,即质量主要集中于上球从而使平衡锤整体的质心位于上球,这样在变速环境下牛眼轮上球体对平衡锤的支持力可以抵消加速度引起的惯性力所带来的影响,避免了控制系统误判;所述感应筒,固定在载重平台的下部,感应筒内开设有十字状的导向槽,用于限制平衡锤下摆的摆动方向。其中,导向槽的方向与载重平台的对角线方向重合,槽的末端都贴有电容片。
9.本发明中,所述控制调整组件包括:中心控制模块、伸缩杆、伸缩杆固定座和铁板,其中:所述中心控制模块,固定在铁板中央,接收测量组件中感应筒内的电容片变化信号,感知到哪个顶角需要调节高度,发送控制信号给对应顶角下的伸缩杆进行升降,使平衡锤下摆恢复到感应筒轴线位置,从而维持测量平台和承载面的平衡;所述伸缩杆,固定在伸缩杆固定座内,位于测量组件的四个顶点下部,接受中心控制模块的信号,进行升降运动,调整测量组件顶点的相对高低,维持平台的整体平衡;所述伸缩杆固定座,用于固定伸缩杆,本身固定于铁板的四个顶点处;所述铁板,作为底座和控制调整组件的过渡连接件,和底座的四个凸座固定连接,自身也设置相应的孔位用于连接伸缩杆固定座和中心控制模块。
10.本发明中,所述连接组件包括插头座、插销、连接块、摆动件,其中:所述插头座固定在测量组件的四个顶角处,与连接块铰链连接,可以发生相对转动。连接块和摆动件固连,而摆动件与伸缩杆顶端也铰链连接。按此,连接组件具有两个旋转自由度,并且两个旋转轴线相互垂直,分别与测量组件的两个对角线相互平行;做到一条对角线在调整水平时,另一条对角线上顶点处的连接方式不会阻碍调整过程。
11.本发明中,所述底座与移动场景下的承载面(车辆、无人机等)固连,内部设置凸座,用于固定铁板。
12.测量组件通过感应内部的平衡锤下摆和槽口末端电容片之间电容的变化,获得平台的俯仰角变化信息;控制调整组件接受上部测量组件的俯仰角变化信息,控制对应的伸缩杆升降,保持平衡锤下摆与测量组件轴线平行,从而维持测量组件和承载面的水平;连接组件具有两个旋转自由度,旋转的轴线与测量组件的对角线以及平衡锤下摆位移方向平行;底座可固定于移动场景下的承载面上,例如行进的车辆、飞行的无人机等。
13.本发明的工作原理在于,一个平面在任意方向俯仰角的变化都可以分解成围绕x和y轴两个轴线的旋转角度变化,此处x和y轴被设立为测量平台的两个对角线方向。当测量平台的俯仰角发生变化时,平衡锤下摆在感应筒导向槽的导向作用下会往顶点处摆动。下摆摆向哪个顶点,说明与该顶点相对的顶点偏高,需要降低相对顶点的高度、提升该顶点的高度,使重锤下摆恢复到半球凹槽的轴线处。下摆摆向哪个顶点的信息通过感应电容片之间的电容变化获得,将电容变化信息传递给下部的中心控制模块,从而发送升降信息给对应顶点下的伸缩杆,以此来调节顶点间的相对高度。
14.本发明的有益效果在于:(1)工作原理简单易懂、结构清晰容易实现、成本低廉;(2)无需陀螺仪等高精度测量仪器测量平台的俯仰角变化,即可对俯仰角进行调整,保持平台水平;(3)克服了加速场景下惯性力造成的调整误判问题,可以应用于众多的移动变速场景;(4)避免了温度、磁场等外部因素带来的影响,不依赖于信号即可进行实时性调整,可以适用于众多极端恶劣的场景。
附图说明
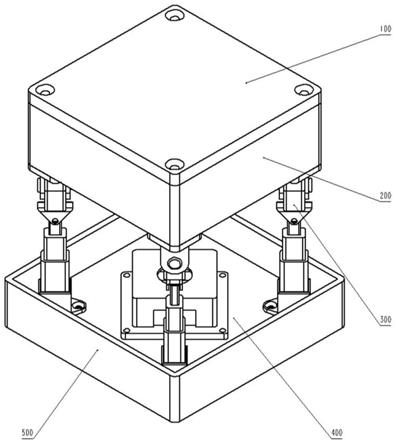
15.图1为本发明的针对移动场景下的俯仰角稳定平台的整体结构示意图。
16.图2为本发明中测量组件的爆炸视图。
17.图3为本发明中控制调整组件和底座的爆炸视图。
18.图4为本发明中连接组件的结构示意图。
19.图中标号:100为承载面,200为测量组件,300为连接组件,400为控制调整组件,500为底座;210为平衡锤,220为载重平台,230为牛眼轮,240为感应筒。240的导向槽中,250为电容片,260为电容圈;310为插头座,320为插销,330为连接块,340为摆动件;410未伸缩杆,420为伸缩杆固定座,430为中心控制模块,440为铁板。
具体实施方式
20.下面通过实施例结合附图进一步描述本发明。本领域的普通技术人员可以认识到,在不偏离本发明的精神和范围的情况下,可以用各种不同的方式对所描述的实施例进行修正。因此,附图和描述在本质上是说明性的,而不是用于限制权利要求的保护范围。此外,在本说明书中,附图未按比例画出,相同的附图标记表示相同或相似的部分。
21.图1是本发明的针对移动场景的俯仰角稳定平台整体结构示意图。
22.参照图1,移动场景下的俯仰角稳定平台,包括承载面100、测量组件200、连接组件300、控制调整组件400和底座500。
23.参照图2,本发明所述的测量组件200包括载重平台220、牛眼轮230、平衡锤210、感应筒240、电容圈260、电容片250。
24.载重平台220,中心有半球状凹槽,用于容纳平衡锤210的上部分。凹槽上还设置了以轴线为中心,均匀分布的圆柱阶梯状凹槽,用于放置牛眼轮230;牛眼轮230,放置于载重平台220的圆柱阶梯状凹槽内,伸出的球体高于半球状凹
槽的表面,支持各个方向的滚动并与平衡锤210的上部分接触,避免平衡锤210的上部分与载重平台220的凹槽直接接触,变滑动摩擦为滚动摩擦,进一步减小平衡锤210在载重平台220内的活动阻力;平衡锤210,分为上球和下摆两部分。上球是一个球体截取的一部分,上球面的曲率中心位于载重平台220半球凹槽的球心并且弧面半径小于半球凹槽的半径,上球的弧面与牛眼轮230的球体相接触,并且和半球凹槽的表面保持一段距离。下摆缠上电容圈260,伸入下部感应筒240的导向槽中。其中平衡锤210需要做到“头重脚轻”,即质量主要集中于上球从而使整体的质心位于上球,这样在变速环境下牛眼轮230上的球体对平衡锤210的支持力可以抵消加速度引起的惯性力所带来的影响,避免了控制系统误判;感应筒240,固定在载重平台220的下部,本实施例中采用螺纹连接,也可以是焊接、卡接等其他固定方式,此处不一一赘述。感应筒240内开设有十字状的导向槽,限制了平衡锤210下摆的摆动方向。其中,导向槽的方向与载重平台220的对角线方向重合,槽的末端都贴有电容片250。
25.图3是本发明所述的控制调整组件400和底座500的爆炸视图。
26.参照图3,本发明所述的控制调整组件400包括伸缩杆410、伸缩杆固定座420、中心控制模块430、铁板440。
27.中心控制模块430,固定在铁板440中央,接收测量组件200内感应筒240中的电容变化信号,感知到哪个顶角需要调节高度,发送控制信号给对应顶角下的伸缩杆410进行升降,使平衡锤210下摆恢复到感应筒240轴线位置,从而维持测量组件200和承载面100的平衡;伸缩杆410,固定在伸缩杆固定座420内,位于测量组件200的四个顶点下部,接受中心控制模块430的信号,进行升降运动,调整测量组件200顶点的相对高低,维持平台的整体平衡。
28.铁板440,作为底座500和控制调整组件400的过渡连接件,和底座500的四个凸座固定连接,自身也设置相应的孔位用于连接伸缩杆固定座420和中心控制模块430。
29.底座500与移动场景下的承载面(车辆、无人机等)固连。
30.图4是本发明所述的连接组件300的结构示意图。
31.如图4所示,连接组件300包括插头座310、插销320、连接块330、摆动件340。
32.在本实施例中,插头座310固定在测量组件200的四个顶点处,与连接块330铰链连接,可以发生相对转动。连接块330和摆动件340固连,而摆动件340与伸缩杆410顶端也用铰链连接。照此,连接组件300具有两个旋转自由度,并且旋转轴线相互垂直,分别与测量组件200的两个对角线相互平行。做到一条对角线在调整水平时,另一条对角线上顶点处的连接方式不会阻碍调整过程。
33.尽管为使解释简单化将上述方法图示并描述为一系列结构,但是应理解并领会,这些方法不受具体所限,因为根据一个或多个实施例,一些结构可按不同次序发生和/或与来自本文中图示和描述或本文中未图示和描述但本领域技术人员可以理解的其他动作并发地发生。
34.提供对本公开的先前描述是为使得本领域任何技术人员皆能够制作或使用本公开。对本公开的各种修改对本领域技术人员来说都将是显而易见的,且本文中所定义的普
适原理可被应用到其他变体而不会脱离本公开的精神或范围。由此,本公开并非旨在被限定于本文中所描述的示例和设计,而是应被授予与本文中所公开的原理和新颖性特征相一致的最广范围。
35.本实施例的工作方式是,一个平面在任意方向俯仰角的变化都可以分解成围绕x和y轴两个轴线的旋转角度变化,此处x和y轴被设立为测量平台200的两个对角线方向。当测量平台200的俯仰角发生变化时,平衡锤210下摆在感应筒240导向槽的导向作用下会往顶点处摆动。下摆摆向哪个顶点,说明与该顶点相对的顶点偏高,需要降低相对顶点的高度、提升该顶点的高度,使平衡锤210下摆恢复到半球凹槽的轴线处。下摆摆向哪个顶点的信息是通过感应电容片(250、260)之间的电容变化获得,将电容变化信息传递给下部的中心控制模块430,从而发送升降信息给对应顶点下的伸缩杆410,以此来调节顶点间的相对高度。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1