基于观测器的多无人机协同运输系统控制方法
1.本发明属于多智能体编队控制领域,更具体地,涉及一种基于观测器的多无人机协同运输系统控制方法。
背景技术:
2.多智能体编队控制是当前多智能体系统研究的热点问题,它是指由多个智能体组成的团队在向特定目标或特定方向运动的过程中,相互之间保持预定的几何形态。多智能体编队控制在军事、航天和工业等各个领域具有广泛的应用,例如实现移动机器人、无人机、潜艇、卫星和航天飞行器等运动载体的编队控制。在军事领域中,多移动机器人采用合理的编队可以代替士兵执行恶劣和危险环境下的诸如侦察、搜寻、排雷和巡逻等军事任务。以侦察任务为例,单个机器人获取环境信息的能力通常有限,但如果多个机器人保持合理的队形,分工获取周围的环境信息,就有可能迅速且准确地感知群体所在区域的环境信息,使群体的资源利用率比成员随机分布时更高。在航天领域,卫星编队不但可大大降低系统成本,提高系统的可靠性和生存能力,而且可扩展和超越传统单个卫星的功能,完成许多单个航天器不可能完成的任务。
3.多无人机协同运输是多智能体编队的一个重要应用方向。一方面,为了实现对多无人机协同运输系统的控制,首先需要对多无人机协同运输系统进行动力学建模。然而,在建立多无人机协同运输系统动力学模型的过程中,由于绳系约束的存在,利用传统的拉格朗日方法会造成动力学方程中出现高阶微分的情况,高阶微分的存在会导致动力学方程因求解运算量过大而难以求解,从而无法获得对无人机的控制量。另一方面,在对多无人机协同运输系统进行控制的过程中,还涉及到无人机的抗扰动控制。具体地,在无人机的外环控制中,需要排除力的干扰的影响,而传统的鲁棒控制大部分为非线性控制,其数学表达式复杂,并且对于复杂多样的干扰的抗扰动效果并不理想。同时传统的单观测器的对于复杂扰动的观测能力比较有限。在无人机的内环控制中,干扰量比较小且干扰形式单一,而现有的基于观测器的内环控制方法所采用的控制器的构型比较复杂,这种复杂的控制器构型会带来计算量过大的问题。
技术实现要素:
4.本发明的目的在于解决现有多无人机协同运输系统的控制参数求取过程中存在的建模环节运算量大以及内外环控制环节运算量大、抗扰动效果不理想的问题。
5.为了实现上述目的,本发明提供一种基于观测器的多无人机协同运输系统控制方法,该方法包括以下步骤:
6.确定构成多无人机协同运输系统的多无人机的编队队形参数;
7.构建无约束下的单无人机动力学方程;
8.根据所述多无人机的编队队形参数和所述无约束下的单无人机动力学方程,并基于udwaida-kalaba理论构建绳系约束下的所述多无人机的动力学方程;
9.根据所述多无人机的动力学方程,构建状态观测器和状态扩张观测器;
10.根据所述状态观测器和所述状态扩张观测器获取目标单无人机的外环控制参数;
11.根据所述目标单无人机的外环控制参数,并基于快速终端滑模控制方法对所述目标单无人机进行内环控制。
12.作为优选的是,所述多无人机的编队队形参数包括编队偏差矩阵、无人机的起始位置矩阵、无人机的目标位置矩阵、负载的起始位置和负载的目标位置。
13.作为优选的是,所述编队偏差矩阵的表达式为:
14.δx=[δx1,δx2,...,δxi]
t
[0015]
上式中,δxi为第i个无人机的偏差向量,t表示转置;
[0016]
所述无人机的起始位置矩阵的表达式为:
[0017]
x0=[x
01
,x
02
,...,x
0i
]
t
[0018]
上式中,x
0i
为第i个无人机的起始位置,x0=x
l0
+δx,x
l0
为所述负载的起始位置;
[0019]
所述无人机的目标位置矩阵的表达式为:
[0020]
xd=[x
d1
,x
d2
,...,x
di
]
t
[0021]
上式中,x
di
为第i个无人机的目标位置,xd=x
ld
+δx,x
ld
为所述负载的目标位置。
[0022]
作为优选的是,所述无约束下的单无人机动力学方程的表达式为:
[0023][0024][0025][0026][0027][0028][0029]
上式中,x、y和z分别为无人机在世界坐标系下的x轴坐标值、y轴坐标值和z轴坐标值,φ、θ和ψ分别为无人机的滚转角、俯仰角和偏航角,u1、u2、u3和u4分别为无人机四个通道的控制输入,m为无人机的质量,d
fx
、d
fy
和d
fz
分别为无人机在x方向、y方向和z方向上受到的干扰力,i
x
、iy和iz分别为无人机在x方向、y方向和z方向上的转动惯量,jr为无人机桨叶的转动惯量,l为无人机桨叶到无人机质心的距离,d
φ
、d
θ
和d
ψ
分别为无人机在φ方向、θ方向和ψ方向上受到的干扰力矩的作用,ω=ω
1-ω2+ω
3-ω4,ω1、ω2、ω3和ω4分别为无人机四个桨叶的转动速度,g为重力加速度。
[0030]
作为优选的是,所述多无人机的动力学方程的表达式为:
[0031]
[0032]
上式中,a
ci
为绳系约束下的第i个无人机的加速度,a
cl
为绳系约束下的负载的加速度,au为未受到绳系约束的系统加速度,a
ui
为未受到绳系约束的第i个无人机的加速度,a
ul
为未受到绳系约束的负载的加速度,m=diag(m1,...,mi,...mn,m
l
)∈r
(n+1)
×
(n+1)
,mi和m
l
分别为第i个无人机的质量和负载的质量,代表克罗内克积,i3为维度是3的单位矩阵;
[0033][0033]
xi为第i个无人机的坐标,为moore-penrose逆,r
il
=[x
i-x
l
],x
l
为负载的坐标,
[0034]
作为优选的是,所述状态观测器的表达式为:
[0035][0036][0037]
上式中,ξi为外源系统状态变量,为外源系统状态变量估计值,l为状态观测器的增益,vi为第i个无人机的速度,为第i个无人机的速度,i为维度是1的单位矩阵,fi为第i个无人机受到的合外力,和分别为第i个无人机受到的导数有着上界的扰动的观测值和第i个无人机受到的周期性扰动的观测值,
[0038]
作为优选的是,所述状态扩张观测器的表达式为:
[0039][0040][0041][0042]
上式中,和分别为第i个无人机的坐标、速度和受到的导数有着上界的扰动的观测值,k
p1
、k
p2
和k
p3
均为调节状态扩张观测器性能的正值系数,e3为地球坐标系中朝向地心的向量,d
mfi
为第i个无人机受到的周期性扰动。
[0043]
作为优选的是,所述目标单无人机的外环控制参数为外环期望控制力,所述外环期望控制力的表达式为:
[0044][0045]
上式中,a
di
为第i个无人机的期望加速度,kpx
和k
dx
分别为控制无人机的比例和微分项系数,e
xi
为第i个无人机的目标位置和当前位置的插值。
[0046]
作为优选的是,所述根据所述目标单无人机的外环控制参数,并基于快速终端滑模控制方法对所述目标单无人机进行内环控制包括:
[0047]
根据所述外环期望控制力获取所述目标单无人机的内环期望姿态角;
[0048]
根据所述内环期望姿态角获取所述目标单无人机的控制输入。
[0049]
作为优选的是,所述内环期望姿态角的表达式为:
[0050][0051][0052][0053][0054]
上式中,u
1i
为第i个无人机在第一个通道的控制输入,φ
di
和θ
di
分别为第i个无人机的期望滚转角和期望俯仰角,f
zi
为第i个无人机在z轴方向上的控制力,k
pz
为无人机在垂直方向上的比例控制系数,z
di
为第i个无人机在z轴方向上的目标位置,zi为第i个无人机在z轴方向上的当前位置,k
dzi
为第i个无人机的控制z轴的微分系数,f
dxi
为第i个无人机在x轴方向上的期望作用力,f
dyi
为第i个无人机在y轴方向上的期望作用力,ψi为第i个无人机的实际偏航角;
[0055]
si为第i个无人机设计的滑模控制的滑模面,e
1i
为第i个无人机的姿态角速度与目标姿态角速度之差,θi=[φi,θi,ψi]
t
,θ
di
=[φ
di
,θ
di
,ψdi]
t
,e
2i
为第i个无人机的姿态角加速度与目标姿态角加速度之差,p和q为正的无人机正奇数,v=[1 1 1]
t
,β为定义滑模面参数的正值;
[0056]
所述目标单无人机的控制输入的表达式为:
[0057][0058]
上式中,u
di
=[u
φi
,u
θi
,u
ψi
]
t
,u
φi
、u
θi
和u
ψi
分别为第i个无人机在滚转角、俯仰角和偏航角通道的期望控制输入,偏航角通道的期望控制输入,ωi为第i个无人机的电机总转速,d为第i个无人机受到扰动力矩的上界值,η为用于调节控制输入的正值参数。
[0059]
本发明的有益效果在于:
[0060]
本发明的基于观测器的多无人机协同运输系统控制方法,根据预先确定的构成多无人机协同运输系统的多无人机的编队队形参数和预先构建的无约束下的单无人机动力学方程,并基于udwaida-kalaba理论构建绳系约束下的所述多无人机的动力学方程;根据所述多无人机的动力学方程构建状态观测器和状态扩张观测器,并基于所述状态观测器和所述状态扩张观测器获取目标单无人机的外环控制参数;在获取所述目标单无人机的外环控制参数之后,基于该外环控制参数并采用快速终端滑模控制方法对所述目标单无人机进行内环控制。
[0061]
本发明的基于观测器的多无人机协同运输系统控制方法,一方面,采用udwaida-kalaba方程对受绳系约束的多无人机协同运输系统进行建模,与现有的拉格朗日建模方法相比,本发明所采用的建模方法简化了复杂的高阶微分动力学方程,更加适用于实际系统。另一方面,本发明采用状态观测器和状态扩张观测器获取目标单无人机的外环控制参数,这种基于多观测器的外环控制方法相对于现有基于单鲁棒控制器的外环控制方法,对于复杂多样的干扰具有更佳的抗扰动效果。在确定目标单无人机的外环控制参数之后,本发明基于外环控制参数并采用快速终端滑模控制方法对目标单无人机进行内环控制,这种基于快速终端滑模控制的内环控制方式相对于现有基于观测器的内环控制方法相比,运算量大幅度减少。
[0062]
由此可知,本发明的基于观测器的多无人机协同运输系统控制方法能够行之有效地解决解决现有多无人机协同运输系统的控制参数求取过程中存在的建模环节运算量大以及内外环控制环节运算量大、抗扰动效果不理想的问题。
[0063]
本发明的其它特征和优点将在随后具体实施方式部分予以详细说明。
附图说明
[0064]
通过结合附图对本发明示例性实施方式进行更详细的描述,本发明的上述以及其它目的、特征和优势将变得更加明显,其中,在本发明示例性实施方式中,相同的参考标号通常代表相同部件。
[0065]
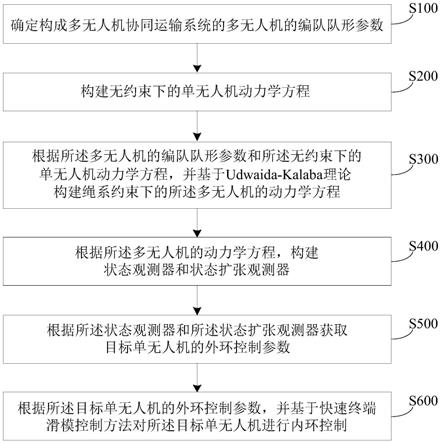
图1示出了根据本发明的实施例的基于观测器的多无人机协同运输系统控制方法的实现流程图;
[0066]
图2示出了根据本发明的实施例的多无人机协同运输系统示意图;
[0067]
图3示出了根据本发明的实施例的无人机控制器构型示意图;
[0068]
图4示出了根据本发明的实施例的无人机运输过程中绳长变化图;
[0069]
图5示出了根据本发明的实施例的负载的位置变化图;
[0070]
图6示出了根据本发明的实施例的负载的跟踪误差变化图。
具体实施方式
[0071]
下面将更详细地描述本发明的优选实施方式。虽然以下描述了本发明的优选实施方式,然而应该理解,可以以各种形式实现本发明而不应被这里阐述的实施方式所限制。相反,提供这些实施方式是为了使本发明更加透彻和完整,并且能够将本发明的范围完整地传达给本领域的技术人员。
[0072]
实施例:图1示出了本发明实施例的基于观测器的多无人机协同运输系统控制方法的实现流程图。参照图1,本发明实施例的基于观测器的多无人机协同运输系统控制方法包括以下步骤:
[0073]
s100、确定构成多无人机协同运输系统的多无人机的编队队形参数;
[0074]
s200、构建无约束下的单无人机动力学方程;
[0075]
s300、根据所述多无人机的编队队形参数和所述无约束下的单无人机动力学方程,并基于udwaida-kalaba理论构建绳系约束下的所述多无人机的动力学方程;
[0076]
s400、根据所述多无人机的动力学方程,构建状态观测器和状态扩张观测器;
[0077]
s500、根据所述状态观测器和所述状态扩张观测器获取目标单无人机的外环控制参数;
[0078]
s600、根据所述目标单无人机的外环控制参数,并基于快速终端滑模控制方法对所述目标单无人机进行内环控制。
[0079]
本发明实施例中,由于多无人机在运输的过程中会受到各种扰动,包括无人机桨叶转动造成的风力干扰、外部环境中的风力干扰以及作用在无人机机架上的风造成的力矩干扰,本发明实施例采用udwaida-kalaba方程对多无人机协同运输系统进行建模,udwaida-kalaba方程具有表达式简洁,不含有高阶微分的特点,采用udwaida-kalaba方程对多无人机协同运输系统建模所需的运算量更小。
[0080]
本发明实施例中,在外环控制中,采用多观测器对无人机受到的扰动进行估计,并补偿给控制输入,从而达到对扰动进行抵消的效果。在内环控制中,所采用的快速终端滑模控制方法可以在有限时间收敛,并且对有界的干扰具有很强鲁棒性,对其进行适当地调整后可以很好地应用于无人机的内环抗扰动控制。
[0081]
进一步地,在本发明实施例的步骤s100中,所述多无人机的编队队形参数包括编队偏差矩阵、无人机的起始位置矩阵、无人机的目标位置矩阵、负载的起始位置和负载的目标位置。
[0082]
具体地,本发明实施例中,所述编队偏差矩阵的表达式为:
[0083]
δx=[δx1,δx2,...,δxi]
t
[0084]
上式中,δxi为第i个无人机的偏差向量,t表示转置;
[0085]
所述无人机的起始位置矩阵的表达式为:
[0086]
x0=[x
01
,x
02
,...,x
0i
]
t
[0087]
上式中,x
0i
为第i个无人机的起始位置,x0=x
l0
+δx,x
l0
为所述负载的起始位置;
[0088]
所述无人机的目标位置矩阵的表达式为:
[0089]
xd=[x
d1
,x
d2
,...,x
di
]
t
[0090]
上式中,x
di
为第i个无人机的目标位置,xd=x
ld
+δx,x
ld
为所述负载的目标位置。
[0091]
再进一步地,在本发明实施例的步骤s200中,所述无约束下的单无人机动力学方程的表达式为:
[0092][0093]
[0094][0095][0096][0097][0098]
上式中,x、y和z分别为无人机在世界坐标系下的x轴坐标值、y轴坐标值和z轴坐标值,φ、θ和ψ分别为无人机的滚转角、俯仰角和偏航角,u1、u2、u3和u4分别为无人机四个通道的控制输入,m为无人机的质量,d
fx
、d
fy
和d
fz
分别为无人机在x方向、y方向和z方向上受到的干扰力,i
x
、iy和iz分别为无人机在x方向、y方向和z方向上的转动惯量,jr为无人机桨叶的转动惯量,l为无人机桨叶到无人机质心的距离,d
φ
、d
θ
和d
ψ
分别为无人机在φ方向、θ方向和ψ方向上受到的干扰力矩的作用,ω=ω
1-ω2+ω
3-ω4,ω1、ω2、ω3和ω4分别为无人机四个桨叶的转动速度,g为重力加速度。
[0099]
再进一步地,在本发明实施例的步骤s300中,所述多无人机的动力学方程的表达式为:
[0100][0101]
上式中,a
ci
为绳系约束下的第i个无人机的加速度,a
cl
为绳系约束下的负载的加速度,au为未受到绳系约束的系统加速度,a
ui
为未受到绳系约束的第i个无人机的加速度,a
ul
为未受到绳系约束的负载的加速度,m=diag(m1,...,mi,...mn,m
l
)∈r
(n+1)
×
(n+1)
,mi和m
l
分别为第i个无人机的质量和负载的质量,代表克罗内克积,i3为维度是3的单位矩阵;
[0102][0102]
xi为第i个无人机的坐标,为moore-penrose逆,r
il
=[x
i-x
l
],x
l
为负载的坐标,
[0103]
再进一步地,在本发明实施例的步骤s400中,所述状态观测器的表达式为:
[0104][0105][0106]
上式中,ξi为外源系统状态变量,为外源系统状态变量估计值,l为状态观测器的
增益,vi为第i个无人机的速度,为第i个无人机的速度,i为维度是1的单位矩阵,fi为第i个无人机受到的合外力,和分别为第i个无人机受到的导数有着上界的扰动的观测值和第i个无人机受到的周期性扰动的观测值,
[0107]
再进一步地,在本发明实施例的步骤s400中,所述状态扩张观测器的表达式为:
[0108][0109][0110][0111]
上式中,和分别为第i个无人机的坐标、速度和受到的导数有着上界的扰动的观测值,k
p1
、k
p2
和k
p3
均为调节状态扩张观测器性能的正值系数,e3为地球坐标系中朝向地心的向量,d
mfi
为第i个无人机受到的周期性扰动。
[0112]
再进一步地,在本发明实施例的步骤s500中,所述目标单无人机的外环控制参数为外环期望控制力,所述外环期望控制力的表达式为:
[0113][0114]
上式中,a
di
为第i个无人机的期望加速度,k
px
和k
dx
分别为控制无人机的比例和微分项系数,e
xi
为第i个无人机的目标位置和当前位置的插值。
[0115]
再进一步地,本发明实施例中,步骤s600所述的根据所述目标单无人机的外环控制参数,并基于快速终端滑模控制方法对所述目标单无人机进行内环控制包括:
[0116]
根据所述外环期望控制力获取所述目标单无人机的内环期望姿态角;
[0117]
根据所述内环期望姿态角获取所述目标单无人机的控制输入。
[0118]
具体地,本发明实施例中,所述内环期望姿态角的表达式为:
[0119][0120][0121][0122][0123]
上式中,u
1i
为第i个无人机在第一个通道的控制输入,φ
di
和θ
di
分别为第i个无人机的期望滚转角和期望俯仰角,f
zi
为第i个无人机在z轴方向上的控制力,k
pz
为无人机在垂
直方向上的比例控制系数,z
di
为第i个无人机在z轴方向上的目标位置,zi为第i个无人机在z轴方向上的当前位置,k
dzi
为第i个无人机的控制z轴的微分系数,f
dxi
为第i个无人机在x轴方向上的期望作用力,f
dyi
为第i个无人机在y轴方向上的期望作用力,ψi为第i个无人机的实际偏航角;
[0124]
si为第i个无人机设计的滑模控制的滑模面,e
1i
为第i个无人机的姿态角速度与目标姿态角速度之差,θi=[φi,θi,ψi]
t
,θ
di
=[φ
di
,θ
di
,ψ
di
]
t
,e
2i
为第i个无人机的姿态角加速度与目标姿态角加速度之差,p和q为正的无人机正奇数,v=[1 1 1]
t
,β为定义滑模面参数的正值;
[0125]
所述目标单无人机的控制输入的表达式为:
[0126][0127]
上式中,u
di
=[u
φi
,u
θi
,u
ψi
]
t
,u
φi
、u
θi
和u
ψi
分别为第i个无人机在滚转角、俯仰角和偏航角通道的期望控制输入,偏航角通道的期望控制输入,ωi为第i个无人机的电机总转速,d为第i个无人机受到扰动力矩的上界值,η为用于调节控制输入的正值参数。
[0128]
本发明实施例中,通过无人机编队偏差矩阵可以将对负载的控制转化为对每个无人机的控制。具体地,无人机的控制分为外环控制和内环控制。基于外环控制可确定无人机的外环期望控制力,在得到了无人机期望的控制力后,可以通过对无人机内环的控制将外环期望控制力转化成内环的控制输入。本发明实施例的无人机控制器构型如图3所示。
[0129]
以下基于仿真算例对本发明实施例的基于观测器的多无人机协同运输系统控制方法进行更为详细的说明:
[0130]
图2示出了本发明实施例的多无人机协同运输系统示意图。参照图2,本发明实施例中,多无人机协同运输系统由四个无人机组成。由此,编队偏差矩阵的可以表示为δx=[δx1,δx2,δx3,δx4]
t
,无人机的起始位置矩阵可以表示为x0=[x
01
,x
02
,x
03
,x
04
]
t
,无人机的目标位置矩阵可以表示为xd=[x
d1
,x
d2
,x
d3
,x
d4
]
t
,负载的起始位置和目标位置分别为x
l0
和x
ld
。根据图2可知,在四个无人机将负载自起始位置运输到目标位置的过程中,会受到绳系约束、邻居风扰、环境干扰以及负载摆动的影响。
[0131]
具体地,在仿真算例中,δx1=[1,1,2]
t
m,δx2=[1,-1,2]
t
m,δx3=[-1,-1,2]
t
m,x4=[-1,1,2]
t
m,x
dl
=[10,10,8]
t
m,x
d0
=[0,0,0]
t
m;
[0132]
设置扰动量如下:
[0133]dφ
=7.5
×
10-4
(sin(t)+1)
[0134]dθ
=7.5
×
10-4
(sin(0.2t)+1)
[0135]dfx
=sin(0.02t)+1
[0136]dfx
=sin(0.02t)+1
[0137]
通过仿真得到图4-图6,其中:
[0138]
图4示出了实施本发明实施例后得到的无人机运输过程中绳长变化图。图4中,横坐标为时间,纵坐标为绳长。其中,四条变化的曲线分别为四个无人机的绳长变化曲线,保持不变的水平线为期望绳长。根据图4可知,四个无人机的绳长除了在50s与60s区间内产生波动以外,均与期望绳长保持一致。
[0139]
图5示出了实施本发明实施例后得到的负载的位置变化图。图5中,横坐标为时间,纵坐标为负载位置。其中,x为负载在x轴方向上的实际位置变化曲线,y为负载在y轴方向上的实际位置变化曲线,z为负载在z轴方向上的实际位置变化曲线,desired x为负载在x轴方向上的期望位置变化曲线,desired y为负载在y轴方向上的期望位置变化曲线,desired z为负载在z轴方向上的期望位置变化曲线。根据图5可知,在采用本发明实施例的基于观测器的多无人机协同运输系统控制方法对多无人机协同运输系统进行控制的过程中,负载在x轴、y轴和z轴方向上的实际位置与目标位置的吻合度较高。
[0140]
图6示出了实施本发明实施例后得到的负载的跟踪误差变化图。图6中,横坐标为时间,纵坐标为跟踪误差。其中,三条变化的曲线分别为负载在x轴、y轴和z轴方向上的跟踪误差。根据图6可知,在采用本发明实施例的基于观测器的多无人机协同运输系统控制方法对多无人机协同运输系统进行控制的过程中,负载在x轴、y轴和z轴方向上的实际位置与目标位置之间的误差的幅度和波动均较小。
[0141]
根据图4-图6可知,在采用本发明实施例的基于观测器的多无人机协同运输系统控制方法对多无人机协同运输系统进行控制时,在扰动情况下,负载可以被多无人机协同运输系统运输到有效的位置。
[0142]
本发明实施例的基于观测器的多无人机协同运输系统控制方法,在利用udwaida-kalaba方法对绳系约束下的多无人机协同运输系统进行建模的基础上,外环利用基于多观测器的控制方法,内环采用快速终端滑模控制方法,不仅提高了多无人机协同运输系统的抗扰动性能,而且使实用场景更加趋近于多无人机协同运输系统的在外场的真实使用场景,具有较佳的实用性。
[0143]
以上已经描述了本发明的各实施例,上述说明是示例性的,并非穷尽性的,并且也不限于所披露的各实施例。在不偏离所说明的各实施例的范围和精神的情况下,对于本技术领域的普通技术人员来说许多修改和变更都是显而易见的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1