一种光伏组件智能清洁机器人远程操控管理系统的制作方法
1.本技术涉及太阳能光伏技术领域,尤其涉及一种光伏组件智能清洁机器人远程操控管理系统。
背景技术:
2.光伏组件也叫太阳能电池板,是太阳能发电系统中的核心部分,也是太阳能发电系统中最重要的部分,其作用是将太阳能转化为电能,并送达蓄电池中存储起来或推动负载工作。光伏面板的清洁是光伏运维的重要一部分,光伏组件表面污浊一是影响光线的透射率,进而影响组件表面接收的辐射量;二是组件表面的污浊因为距离电池片的距离很近,会形成阴影,并在光伏组件局部区域形成热斑效应,进而降低组件的发电效率,甚至烧毁组件。
3.现有技术中,目前光伏组件清洁模式主要采用人工清洁或者工程车辆清洗,然而因风沙气候等因素,光伏面板的清洁度维持的时间极短,并且人工清洁时受力不均容易产生刮痕或者隐裂,特别是水洗的时候,人工无法操作水压的变化,水压越大清洗速度和效果越好,但是对光伏电板的冲击力相对也大,另外,水洗后光伏面板需自行晾干,表面会形成水渍,对光伏面板也是微型阴影遮挡,这样就影响发电效率。
技术实现要素:
4.本技术实施例提供了一种光伏组件智能清洁机器人远程操控管理系统,用于降低对光伏组件发电效率的影响。
5.本技术实施例第一方面提供了一种光伏组件智能清洁机器人远程操控管理系统,包括:
6.行走装置驱动模块、真空吸盘升降模块、自动充电模块、清洁组件驱动模块、图像检测处理模块以及信号控制模块;
7.所述行走装置驱动模块设置在所述机器人底部两侧,所述行走装置驱动模块用于驱动所述机器人在光伏板上行走;
8.所述真空吸盘升降模块位于所述机器人底部中间,所述真空吸盘升降模块用于控制吸盘升降、吸紧以及释放;
9.所述自动充电模块位于所述机器人尾端,所述自动充电模块用于控制所述机器人自动充电以及自动断电;
10.所述清洁组件驱动模块位于所述机器人前端,所述清洁组件驱动模块用于控制滚刷运行;
11.所述图像检测处理模块位于所述机器人内部,所述图像检测与处理模块用于检测所述机器人的位置信息后进行数据处理。
12.可选的,所述行走装置驱动模块包括电机以及驱动轮,所述电机运行带动所述驱动轮,所述驱动轮带动强附着系数履带。
13.可选的,所述自动充电模块连接所述图像检测处理模块,所述自动充电模块通过获取所述图像检测处理模块检测以及处理后的位置信息进行自动充电或者断电。
14.可选的,所述图像检测处理模块包括监控摄像头,所述监控摄像头安装在所述机器人顶部,所述监控摄像头用于实时拍摄所述机器人位于所述光伏板的位置。
15.可选的,所述清洁组件驱动模块包括推压装置、驱动装置以及滚刷,所述推压装置用于调整所述滚刷高度,所述驱动装置用于驱动所述滚刷运行。
16.可选的,所述光伏板的边缘安装传感器,所述传感器用于检测所述机器人在所述光伏板的位置信号信息。
17.可选的,所述信号控制模块用于控制所述行走装置驱动模块、所述真空吸盘升降模块、所述自动充电模块、所述清洁组件驱动模块以及所述图像检测处理模块,所述信号控制模块连接远程控制平台,所述远程控制平台用于远程操作监控所述机器人。
18.从以上技术方案可以看出,本技术实施例具有以下优点:
19.本技术中设置了行走装置驱动模块、真空吸盘升降模块、自动充电模块、清洁组件驱动模块、图像检测处理模块以及信号控制模块,其中行走装置驱动模块设置在机器人的底部两侧,真空吸盘升降模块位于机器人的底部中间,自动充电模块位于机器人的尾端,清洁组件驱动模块位于机器人的前端,图像检测处理模块位于机器人的内部,机器人在进行清洁工作时,行走装置驱动模块驱动机器人在光伏板上行走,清洁组件驱动模块同时驱动滚刷运行清洁污垢,当遇到顽固污垢时,真空吸盘升降模块启动吸盘进行高强度清洁,在机器人清洁过程中图像检测处理模块检测机器人的所在位置,自动充电模块再根据检测信息判断是否需要充电,直到图像检测处理模块检测不到光伏组件上的污垢后清洁完毕,这样有效降低了对光伏组件发电效率的影响。
附图说明
20.图1为一种光伏组件智能清洁机器人远程操控管理系统的系统结构图;
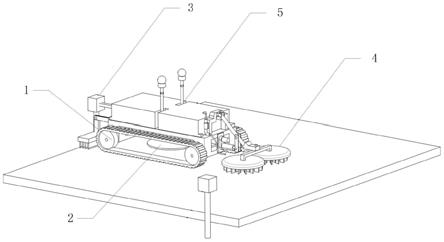
21.图2为光伏组件智能清洁机器人的结构示意图。
具体实施方式
22.本技术实施例提供了一种光伏组件智能清洁机器人远程操控管理系统,用于降低对光伏组件发电效率的影响。
23.下面将结合本技术实施例中的附图,对本技术中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
24.请参阅图1至图2,本技术实施例提供了一种光伏组件智能清洁机器人远程操控管理系统的一个实施例,包括:
25.行走装置驱动模块1、真空吸盘升降模块2、自动充电模块3、清洁组件驱动模块4、图像检测处理模块5以及信号控制模块,其中行走装置驱动模块1位于机器人的底部两侧,真空吸盘升降模块2位于机器人的底部中间,自动充电模块3位于机器人的尾端,清洁组件驱动模块4位于机器人的前端,图像检测处理模块5位于机器人的内部,机器人在进行清洁
工作时,行走装置驱动模块1驱动机器人在光伏板上行走,清洁组件驱动模块4同时驱动滚刷运行清洁污垢,当遇到顽固污垢时,真空吸盘升降模块2启动吸盘进行高强度清洁,在机器人清洁过程中图像检测处理模块5检测机器人的所在位置,自动充电模块3再根据检测信息判断是否需要充电,另外行走装置驱动模块1、真空吸盘升降模块2、自动充电模块3、清洁组件驱动模块4以及图像检测处理模块5分别与信号控制模块连接,信号控制模块将机器人清洁动态传输至远程控制平台,远程控制平台将机器人清洁过程可视化以及智能管控,采用机器人自动化清洁相比传统固定式清洁装置,采购成本降低,维修成本降低,相比人为清洁,降低清洁难度。
26.可选的,行走装置驱动模块1包括电机以及驱动轮,其中电机运行时带动驱动轮,再带动强附着系数履带,由于智能清洁机器人在光伏板上长距离直线行走时,容易因打滑偏离原来的行走方向,驱动轮强附着可以有效防止机器人在光伏板上打滑。
27.可选的,自动充电模块3与图像检测处理模块5连接,自动充电模块3可以自动检测锂电池的剩余电量,当锂电池电量过低时,获取图像检测处理模块5检测到的图像信息以及传感信息确定机器人所在的位置以及记忆充电地点,控制光伏组件智能清洁机器人自动回充以及断电续扫。
28.可选的,图像检测处理模块5包括监控摄像头,其中监控摄像头安装在机器人的顶部,监控摄像头通过实时拍摄机器人周边图像对现场环境进行判断,将机器人距离信息、方向数据信息以及里程数据信息等全方位数据经过处理系统进行计算,其中图像检测装置对光伏板进行清洁度检测,在检测到光伏板清洁度低于指定值,测算需要清洁区域大小进行区域式清扫,准确了解污垢位置以及机器人所在位置,数据处理分析后传输至控制模块对机器人发出命令进行相应的操作,并将现场状态实时反馈至后台。
29.可选的,清洁组件驱动模块4包括推压装置、驱动装置以及滚刷,在机器人进行清洁工作过程中,推压装置根据光伏板清洁接触面调整滚刷的高度,同时驱动装置驱动滚刷运行,其中驱动频率可以根据清洁强度设置。
30.可选的,光伏板的边缘安装传感器,机器人在光伏组件上行走时是沿水平方向向前行走,行走的同时对光伏板表面进行清扫,当走到光伏组件尽头时,传感器检测到光伏组件边缘,机器人停止前进和清扫,由行走装置驱动模块将机器人向上提升一个工位,向上爬行结束后,机器人会朝反方向水平前进,前进的同时对光伏板表面进行清扫,当走到光伏组件另一侧边缘时,再次停止前进和清扫,向上爬升一个工位。整个过程可以分为水平行走、清扫和爬升三个部分,整个清扫过程都是这三个部分的循环,整个光伏组件清扫完毕或电量过低时,机器人会回到初始位置。另外,机器人清洁过程中信号控制模块实时将机器人的清洁状态传输至远程控制平台进行管控,将智能运维系统与光伏智能清洁机器人实现物联,可对智能清洁机器人进行远程操作监控管理,自动化清洁,有效提高了光伏组件发电效率。
31.需要说明的是,对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本技术。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本技术的范围的情况下,在其它实施例中实现。因此,本技术不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1