一种单机无穷大电力系统建模与鲁棒控制方法
1.本发明涉及电力系统技术,特别是一种单机无穷大电力系统建模与鲁棒控制方法。
背景技术:
2.近年来,随着社会的进步与科技的发展,电力系统逐渐成为人们生产、生活中不可或缺的一部分。以我国南方地区为例,由于该地域在全年大部分时间里处于高温状态,居民大量地使用空调、电扇等家用电器,这不可避免地导致了电力消耗的加剧。在此情形下,负荷一旦得不到恰当处理,极易导致电力系统的恶化与失稳,甚至出现大规模停电事故。因此,充分了解电力系统负荷的随机波动情况,对于电力系统安全稳定运行以及人民的生产生活具有重要的意义。
3.目前,对于电力系统负荷随机变化下系统的稳定性分析研究,主要集中在两种方法上:h
∞
理论和markov跳变系统理论。在h
∞
理论中,负荷的变化通常被视作系统中一个满足l2[0,∞)的干扰项。然后,考虑系统参数的不确定性,电力系统的鲁棒稳定性分析的主要工具是lyapunov稳定性理论,通过构造传统的lyapunov函数,推导出基于线性矩阵不等式(lmi)的电力系统稳定性条件以及控制器存在条件。但实际上负荷变化具有随机性,基于传统的lyapunov函数分析得到电力系统的稳定性条件以及控制器条件具有一定的保守性。针对在h
∞
理论下电力系统稳定性研究方法的缺点,markov跳变系统理论能够准确地描述负荷的随机变化,且能够从本质上解决电力系统的鲁棒稳定控制问题。但由于在markov跳变理论中,模态的驻留时间只服从指数分布,而指数分布是连续时间分布中唯一一种无记忆性分布。显然,基于markov理论所得的系统稳定条件以及控制器设计策略也具有一定的保守性。因此,如何降低基于markov理论以及h
∞
理论单机无穷大电力系统稳定条件的保守性,成为该方法研究的重难点之一。
技术实现要素:
[0004]
发明目的:本发明的目的是提供一种单机无穷大电力系统建模与鲁棒控制方法。
[0005]
技术方案:本发明所述的一种单机无穷大电力系统建模与鲁棒控制方法,包括以下步骤:
[0006]
(1)建立semi-markov单机无穷大电力系统模型;
[0007]
建立考虑不确定参数的semi-markov单机无穷大电力系统模型:
[0008][0009]
式中,ω
t
是描述系统中负荷随机变化的semi-markov跳变过程,x(t)∈rn为系统状态变量;y(t)为系统的量测输出;u(t)为系统的控制输入信号;态变量;y(t)为系统的量测输出;u(t)为系统的控制输入信号;和为具有适当维数的系统参数矩阵,和表示不确定参数矩阵
且分别满足和和是已知的常数矩阵,与为时变矩阵满足条件:
[0010][0011]
其中,i代表单位矩阵。
[0012]
(2)设计弹性输出反馈控制器;
[0013]
(2.1)基于semi-markov单机无穷大电力系统,设计如下形式的弹性输出反馈控制器:
[0014][0015]
式中,对于m=ω
t
,表示待确定的控制器增益;表示满足m的不确定摄动矩阵,其中和表示具有适当维数的已知参数矩阵;表示时变参数矩阵且满足
[0016]
(2.2)结合semi-markov单机无穷大电力系统模型与弹性输出反馈控制器,可得出闭环的semi-markov单机无穷大电力系统模型:
[0017][0018]
式中,对于m=ω
t
,m是描述系统中负荷随机变化的semi-markov跳变过程,x(t)∈rn为系统状态变量;y(t)为系统的量测输出;u(t)为系统的控制输入信号;am∈rn×n,和为具有适当维数的系统参数矩阵,δam和δbm表示不确定参数矩阵且分别满足δam=e
am
υ
am
(t)f
am
和δbm=e
bm
υ
bm
(t)f
bm
;f
am
、f
bm
、e
am
、e
bm
是已知的常数矩阵,υ
am
(t)与υ
bm
(t)为时变矩阵满足条件:
[0019][0020]
其中,i代表单位矩阵。
[0021]
(3)构造依赖于系统模态变化以及模态内驻留时间的lyapunov函数;给出单机无穷大电力系统在负荷随机波动下的稳定性判据,进而实现对单机无穷大电力系统的稳定性分析;
[0022]
对于semi-markov单机无穷大电力系统模型,所有的转换率均依赖于驻留时间h,当系统模态发生变化时,h更新为0;若对所有可容许的不确定性以及所有模态m=1,2,存在一系列具有适当维数的正定矩阵pm∈rn×n,矩阵使得下列矩阵不等式成立:
[0023][0024]
其中,
[0025][0026]
[0027]
则称semi-markov单机无穷大电力系统为随机稳定。
[0028]
(4)依据推导出的单机无穷大电力系统稳定性判据以及相关引理,推导出弹性输出反馈控制器的存在条件,并求得保障电力系统稳定的控制器增益,进而设计出依赖于系统模态变化以及模态内驻留时间的弹性输出反馈控制器;
[0029]
如果对于所有模态m=1,2存在一系列具有适当维数的正定矩阵xm∈rn×n,矩阵以及标量γ1>0,γ2>0,γ3>0,使得下列不等式成立:
[0030][0031]
其中,
[0032][0033][0034][0035]
则称单机无穷大电力系统为鲁棒随机稳定且控制器增益能够确定为:
[0036]
(5)控制器性能检验;
[0037]
利用matlab中的线性矩阵不等式工具箱判断在给定所有模态下的系统参数矩阵是否满足于步骤(4)给出的控制器设计条件,若满足,则判定基于所设计的弹性输出反馈控制器,单机无穷大电力系统是随机稳定的。
[0038]
一种计算机存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现上述的一种单机无穷大电力系统建模与鲁棒控制方法。
[0039]
一种计算机设备,包括储存器、处理器及存储在存储器上并可再处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述的一种单机无穷大电力系统建模与鲁棒控制方法。
[0040]
有益效果:与现有技术相比,本发明具有如下优点:1、通过引入semi-markov过程,能够更加准确、合理地描述负荷的随机变化情况;2、通过对所建立的semi-markov单机无穷大电力系统模型进行稳定性分析与控制器设计,能够从本质上解决单机无穷大电力系统的鲁棒控制问题。
附图说明
[0041]
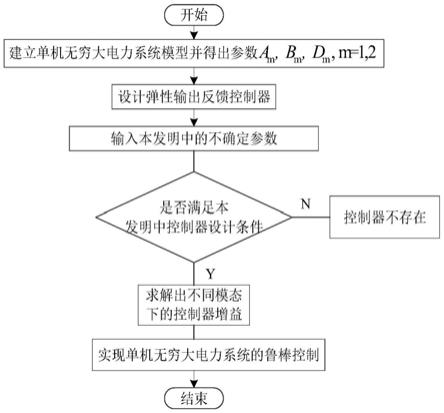
图1为本发明的步骤流程图;
[0042]
图2为单机无穷大电力系统示意图;
[0043]
图3为基于semi-markov过程负荷的模态变化图;
[0044]
图4为弹性输出反馈控制器的动态变化图;
[0045]
图5为基于弹性输出反馈控制器单机无穷大电力系统的状态响应图。
具体实施方式
[0046]
下面结合附图对本发明的技术方案作进一步说明。
[0047]
如图1所示,一种单机无穷大电力系统建模与鲁棒控制方法,包括以下步骤:
[0048]
(1)基于semi-markov理论的单机无穷大电力系统建模
[0049]
结合图2所示的单机无穷大电力系统,利用同步电机的经典park模型,在平衡条件的基础上,得到单机无穷大电力系统的动态特性。在该模型中,忽略定子绕组电阻、磁通导数引起的电压、阻尼绕组、饱和效应和速度电压的频率偏差。另外,假定输电线路的电阻可以忽略不计。如果发电机组控制由一个与电力系统稳定器协调的自动电压调节器组成,则单机无穷大电力系统的动态特征可以描述为下列形式:
[0050][0051]
式中,χ(t)表示以弧度为单位的发电机功角,表示以弧度每秒为单位的发电机额定转速,表示以p.u.为单位的阻尼常数,表示以秒为单位的惯性常数,κ表示以弧度每秒为单位的同步发电机速度,表示以p.u.为单位的机械输入功率,θ(t)表示以p.u.为单位输出到总线的有功功率,表示以秒为单位的直轴瞬态短路时间常数,α表示以p.u.为单位的无穷大电压,τ(t)表示以p.u.为单位发电机可控硅放大器的输入电压。ε
ds
,εd和表示系统电抗。系统参数的标称值给出如表1所示。
[0052]
表1系统参数的标称值
[0053][0054]
基于上述的标称值,系统存在一个平衡点和u
eq
=0。定义xa(t)=χ(t)-0.4π,xc(t)=θ(t)-0.9和u(t)=τ(t),平衡点将移动到新的坐标
原点且单机无穷大电力系统动态被重新表示为:
[0055][0056]
式中,
[0057]
考虑外部干扰引起无限大母线的等效负荷变化,无穷大电压α的模型通过含两个模态的semi-markov过程建立。依据图2,当开关设置为低负荷时,系统为模态1且α=1.2144p.u.。当开关设置为高负荷时,系统为模态2且α=1.1040p.u.。
[0058]
定义基于semi-markov理论,建立单机无穷大电力系统状态空间模型为:
[0059][0060]
式中,m(ω
t
=m)表示semi-markov过程且取值为1和2。该semi-markov过程的变化依据下列转移概率:
[0061][0062]
式中,此外,系统参数能够被表示为:
[0063][0063][0064]
进一步,考虑发电机电抗以及变压器电抗等参数由于电力系统中的复杂能量变换导致其准确值不易于获得的情况,上述单机无穷大电力系统的状态空间模型被改进为:
[0065][0066]
式中,δam和δbm表示不确定参数矩阵且分别满足δam=e
am
υ
am
(t)f
am
和δbm=e
bm
υ
bm
(t)f
bm
。f
am
,f
bm
,e
am
,e
bm
是已知的常数矩阵,υ
am
(t)与υ
bm
(t)为时变矩阵满足条件
[0067]
[0068]
i代表单位矩阵。
[0069]
(2)弹性输出反馈控制器设计
[0070]
基于semi-markov单机无穷大电力系统,设计弹性输出反馈控制器:
[0071][0072]
式中,表示待确定的控制器增益。表示满足的不确定摄动矩阵,其中和表示具有适当维数的已知参数矩阵。表示时变参数矩阵且满足
[0073]
结合系统模型与弹性输出反馈控制器,可得出闭环semi-markov单机无穷大电力系统模型:
[0074][0075]
(3)基于semi-markov理论的单机无穷大电力系统稳定性判据方法
[0076]
判据:对于semi-markov单机无穷大电力系统模型,所有的转换率均依赖于驻留时间h(当系统模态发生变化时,h更新为0)。若对所有可容许的不确定性以及所有模态m=1,2,存在一系列具有适当维数的正定矩阵pm∈rn×n,矩阵使得下列矩阵不等式成立:
[0077][0078]
其中:
[0079][0080][0081]
则称单机无穷大电力系统为随机稳定。
[0082]
证明:针对单机无穷大系统模型,选择依赖于系统模态变化以及模态内驻留时间的lyapunov函数:
[0083][0084]
式中,是一个待确定的正定矩阵。
[0085]
然后,对式(8)求无穷小算子得:
[0086][0087]
因为在semi-markov过程中模态内驻留时间服从不具有无记忆性的一般概率分布,这意味着然后,借助累积分布函数和概率密度函
数可得:
[0088][0089]
式中,h表示系统从上次跳跃停留在模态m上的时间,f
ml
表示系统从模态m跳跃到模态l的概率密度,表示系统停留在模态m上驻留时间的累积分布函数。
[0090]
对于参数满足可得:
[0091][0092]
式中,
[0093]
考虑将式(10)带入到(9)可得:
[0094][0095]
然后,选取在0处的泰勒级数去分析上述极限:
[0096][0097]
对于条件以及任意常数ι>0,可得:
[0098][0099][0100]
式中,h表示有限的驻留时间,表示系统从模态m上跳跃的转换率。
[0101]
定义和可得:
[0102][0103]
基于式(7),可得即即根据dynkin公式,可得:
[0104][0105]
式中,表示系统运行时间。最后当趋近于无穷时,可得
[0106][0107]
得证。
[0108]
(3)基于合同变化方法求解弹性输出反馈控制器增益
[0109]
首先,给出求解控制器增益时用到的引理。
[0110]
引理1:给定具有适当维数的矩阵q=q
t
,h,e,有:
[0111]
q+hfe+e
tftht
<0
[0112]
对所有满足f
t
f≤i的f,当且仅当存在λ>0,有:
[0113]
q+λhh
t
+λ-1et
re<0
[0114]
判据:如果对于所有模态m=1,2,存在一系列具有适当维数的正定矩阵xm∈rn×n,矩阵以及标量γ1>0,γ2>0,γ3>0,使得下列不等式成立
[0115][0116]
其中,
[0117][0118][0119][0120]
则称单机无穷大电力系统为鲁棒随机稳定且控制器增益能够确定为:
[0121]
证明:通过引理1处理不等式(7)中的不确定项,可得:
[0122][0123]
其中,
[0124][0125][0126]
φ
33
=diag{-γ1i,-γ2i},φ
55
=diag{-γ3i,-γ3i}。
[0127]
定义矩阵使用矩阵和分别乘以不等式(12)的两边,对于和有不等式(11)成立。同时,控制器增益被确定为:得证。
[0128]
下面介绍本发明的实施例:
[0129]
单机无穷大电力系统如图2所示,其中建模后的相关系统矩阵给出如下:
[0130][0131][0132][0133]
此外,假设系统所有模态的驻留时间服从weibull分布,在此分布中包含尺度参数和形状参数然后,概率分布函数与累积分布函数能够分别被表示为:
[0134]
当h<0时得同时,转换率函数能够被表示为然后,可推出系统从模态m到模态l的转换率函数为进一步,参数和在不同模态下分别被选择为被选择为可得出转换率矩阵及期望分别为和
[0135]
基于上述参数,采用本发明方法对单机无穷大电力系统进行仿真测试,图3描述了semi-markov模态变化,图4描述了控制器状态变化,图5描绘了基于本文方法所得到的系统状态变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1