一种基于模糊反步的网联汽车系统安全控制方法
1.本发明涉及含有干扰和虚假数据注入攻击下网联汽车系统的建模、干扰估计器设计、状态观测器设计以及安全控制器设计。
背景技术:
2.近年来,网联汽车的控制技术引起了众多学者的高度关注,为了提高网联汽车的行车效率和驾驶安全性许多相关的研究被报道。如[“adaptive tracking control for networked control systems of intelligent vehicle”(m.li,y.chen,a.zhou,w.he,and x.li,information sciences,vol.503,pp.493-507,2019.)]考虑到智能车辆存在网络诱导干扰和外部干扰,提出了一种基于滑模控制的新控制算法来补偿干扰。[“adaptive fault-tolerant control of platoons with guaranteed traffic flow stability”(g.guo,p.li and l.hao,ieee transactions on vehicular technology,vol.69,no.7,pp.6916-6927,2020.)]针对一组汽车系统中的故障问题,提出了一种自适应的容错控制方法。然而,由于通信网络的引入,黑客攻击给网联汽车系统的控制带来了新的挑战。到目前为止,具有fdi攻击和干扰的网联汽车系统的安全控制问题尚未得到充分研究,因为在补偿干扰的同时应对黑客的攻击将更具挑战性,对控制算法的设计也提高了难度。
技术实现要素:
[0003]
本发明的目的在于克服现有技术的不足,提供一种基于模糊反步的网联汽车系统安全控制方法,实现干扰和虚假数据注入攻击下网联汽车系统的建模、干扰估计器设计、状态观测器设计以及安全控制器设计。
[0004]
本发明解决所述问题采用的方法是,本发明针对网联汽车系统中的干扰和虚假数据注入攻击问题,设计了一种干扰估计器和状态观测器;为了实现安全控制,设计了一种基于模糊反步的安全控制器。本发明能够有效解决网联汽车系统在干扰和虚假数据注入攻击下的安全控制问题。
[0005]
所述干扰和虚假数据注入攻击下网联汽车系统的建模,对第i辆汽车,考虑到外界扰动和虚假数据注入攻击,则汽车动态模型变为:
[0006][0007][0008][0009]
所述干扰观测器设计,设计如下形式的估计器
[0010][0011][0012]
其中j=1,2,3分别表示第i
th
辆汽车的一阶、二阶、三阶方程,即位置、速度和加速
度动态方程。
[0013]
所述状态观测器设计,设计如下形式的观测器
[0014][0015]
所述安全控制器设计,对于第i辆汽车,采用模糊反步方法,设计如下控制器:
[0016][0017]
其中参数自适应律为:
[0018][0019][0020]
其中s
i,j
表示汽车虚拟误差,和表示模糊逻辑系统的基函数,分别被用来逼近系统的非线性函数和黑客注入的未知函数,ω
i,3
,i,g
i,3,0
,χ
i,3
,c
i,3
,ρi和ri均为调节参数。
[0021]
本发明的目的是这样实现的。
[0022]
本发明基于模糊反步的网联汽车系统安全控制方法含有干扰和虚假数据注入攻击下网联汽车系统的建模、干扰估计器设计、状态观测器设计以及安全控制器设计。本发明公开了一种基于模糊反步的网联汽车系统安全控制方法。其技术包括网联汽车系统的建模、干扰估计器设计、状态观测器设计以及安全控制器设计。本发明针对网联汽车系统中的干扰和虚假数据注入攻击问题,设计了一种干扰估计器和状态观测器;为了实现安全控制,设计了一种基于模糊反步的安全控制器。本发明能够有效解决网联汽车系统在干扰和虚假数据注入攻击下的安全控制问题。
附图说明
[0023]
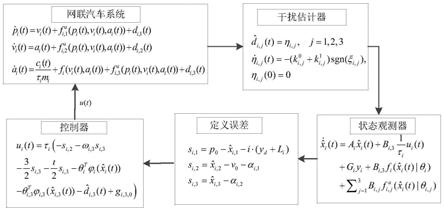
图1是本发明控制系统的结构示意图。
具体实施方式
[0024]
下面结合附图对本发明的具体实施方式进行描述,以便本领域的技术人员更好地理解本发明。需要特别提醒注意的是,在以下的描述中,当已知功能和设计的详细描述也许会淡化本发明的主要内容时,这些描述在这里将被忽略。
[0025]
下面以网联汽车系统为例,结合附图详细描述本发明的技术方案。
[0026]
图1是本发明控制系统的结构示意图
[0027]
如图1所示,本发明涉及含有干扰和虚假数据注入攻击下网联汽车系统的建模、干扰估计器设计、状态观测器设计以及安全控制器设计。
[0028]
系统建模:考虑一组网联汽车系统由1个领导者和n个跟随者组成,其中第i辆汽车的动态方程如下:
[0029]
[0030]
且:
[0031][0032]
其中ai(t),vi(t)和pi(t)分别表示i
th
(i=0,1,2,...,n)汽车的加速度,速度和位置,参数k
di
,d
mi
,ci(t),τi和mi分别表示气动阻力系数、机械阻力、发动机/制动器输入、发动机时间常数和质量。
[0033]
考虑到外界扰动和虚假数据注入攻击,则汽车动态模型变为:
[0034][0035]
其中和d
i,j
(t)(i=1,2,...,n,j=1,2,3)分别表示黑客注入的虚假数据和外界扰动。且扰动和它的一阶微分都是有界的,即和其中上界是已知,但上界是未知的,j=1,2,3分别表示第i
th
辆汽车的一阶、二阶、三阶方程,即位置、速度和加速度动态方程。
[0036]
对于第i辆汽车,定义状态变量:xi(t)=[x
i,1
(t),x
i,2
(t),x
i,3
(t)]
t
,x
i,1
(t)=pi(t),x
i,2
(t)=vi(t),x
i,3
(t)=ai(t)。定义输出和控制输入为yi(t)=x
i,1
(t)和ui(t)=ci(t)/mi。则第i辆汽车的动态可以写成如下的状态空间模型:
[0037][0038]
干扰估计器设计:定义误差变量
[0039]ei,j
=z
i,j-x
i,j
,j=1,2,3
ꢀꢀ
(5)
[0040]
其中,中间变量z
i,j
(j=1,2,3)的变化率设计如下:
[0041][0042]
其中和为模糊逻辑系统的权重因子,和表示模糊逻辑系统的基函数,分别被用来逼近系统的非线性函数和黑客注入的未知函数。设计滑模函数:
[0043][0044]
其中和辅助变量的变化率设计为:
[0045][0046]
其中和表示调节参数。进一步,干扰估计器设计为:
[0047][0048]
状态观测器设计:定义变量和矩阵:b
i,1
=[1,0,0]
t
,b
i,2
=[0,1,0]
t
,b
i,3
=[0,0,1]
t
,ci=[1,0,0]
t
和于是,设计如下观测器:
[0049][0050]
其中θi,θ
i,j
为模糊逻辑系统的权重因子。
[0051]
控制器设计:定义误差变量
[0052][0053]
其中α
i,j-1
(t)表示虚拟控制输入,s
i,j
是虚拟误差,且s
i,1
表示汽车间的位置误差,yd表示期望的汽车之间的间距,li表示第i辆汽车的长度。
[0054]
步骤1(j=1):设计相应的虚拟控制输入和参数自适应律为:
[0055][0056][0057]
其中c
i,1
和ω
i,1
表示调节参数,且c
i,1
>0和ω
i,1
>0。
[0058]
步骤2(j=2):设计相应的虚拟控制输入和参数自适应律为:
[0059][0060][0061]
其中a0表示领导者汽车的加速度,i,c
i,2
和ω
i,2
表示调节参数,且t≥1,c
i,2
>0和ω
i,2
>0,参数g
i,2,0
可通过如下超螺旋系统计算得到。
[0062][0063]
其中和g
i,j,0
表示超螺旋系统(16)的状态,为时间常数,且
[0064]
步骤3(j=3):设计实际控制输入和参数自适应律为:
[0065][0066][0067][0068]
其中c
i,3
和ω
i,3
表示调节参数,且c
i,2
>0和ω
i,2
>0,参数g
i,3,0
可通过如下超螺旋系统(16)计算得到,s
i,j
表示汽车虚拟误差,和表示模糊逻辑系统的基函数,分别被用来逼近系统的非线性函数和黑客注入的未知函数,ω
i,3
,ι,g
i,3,0
,χ
i,3
,c
i,3
,ρi和ri均为调
节参数。
[0069]
尽管上面对本发明说明性的具体实施方式进行了描述,以便于本技术领域的技术人员理解本发明,但应该清楚,本发明不限于具体实施方式的范围,对本技术领域的普通技术人员来讲,只要各种变化在所附的权利要求限定和确定的本发明的精神和范围内,这些变化是显而易见的,一切利用本发明构思的发明创造均在保护之列。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1