一种三轴伺服电机控制系统
1.本实用新型涉及伺服电机的运动控制领域。
背景技术:
2.随着社会工业化进程的加快,自动化流水线在各行各业中的应用也越来越普遍,特别是各种样式的工业机床,具体到一台机床上的运动控制部分,目前普遍采用带编码器类型的高精度伺服电机进行搭建,以一台具有x,y,z三轴方向的简单机床为例,则至少需要三台伺服电机进行协作运动,以实现精确的位点控制。但现有的各类机床普遍造价高昂,针对机床运动控制部分,无法实现模块化,通用化。
3.因此,如何设计一套低成本,可扩展的伺服电机运动控制系统,具有相当的必要性。在工业控制领域,目前大多数采用步进电机加工控机的模式搭建多轴电机运动控制系统,步进电机相比伺服电机而言,具有扭矩大,价格便宜等优点,但其缺点是步距角固定,因此精度较差。在电机控制部分,步进电机驱动器通常不支持数字通信接口,因而必须搭配工控机使用pwm脉宽调制波形进行驱动,随之带来的就是控制信号不稳定,扩展性差,以及工控机价格昂贵等问题。
技术实现要素:
4.针对以上各种问题,本实用新型以三轴伺服电机控制系统为例,旨在设计一套通用性强,可扩展性高,价格低廉的三轴伺服电机控制系统。
5.通过本系统可以较为便利的实现对三轴伺服电机系统的运动控制,且具有可扩展性。
6.为了达到以上目的,本实用新型采用的技术方案是:
7.一种三轴伺服电机控制系统,其特征在于,包括:三台伺服电机及其驱动器,一块单片机主控板,9个限位开关以及一个急停按钮;
8.所述三台伺服电机驱动器采用rs-485总线进行串联,并连接到主控板的rs-485通信接口上;三台伺服电机与其驱动器的连接包括编码器数据线,与u,w,v三相电机线;
9.所述9个限位开关采用继电器模块与主控板进行隔离连接,急停按钮同样采用继电器模块与主控板进行隔离连接;
10.从三台伺服电机驱动器上分别引出电机到位信号,采用继电器模块与主控板进行隔离连接;
11.所述单片机主控板采用uart串口与上位机进行通讯,执行给定信号帧所规定的操作;
12.上述所述硬件连接结构均可进行扩展,且在单片机主控板上预留有空余接口,可扩展为五轴或多轴控制系统;
13.所述的限位开关,为光电式限位开关,具有发射端和接收端,当发射端被拨片挡住时输出低电平,否则输出高阻态。
14.所述的限位开关,分别布置在三轴电机运动范围的上限,下限,零点部分。
15.单片机主控板采用stm32f407作为主控mcu,单片机与电机驱动器的 rs-485连接采用sp3485转接芯片将rs-485信号转接为uart信号。
16.所述的伺服电机及其驱动器,能够给出电机运动到位的信号,到位时输出低电平,未到位时输出高阻态。
17.由于采用上述技术方案,与现有技术相比,本实用新型可以较为便利的实现对三轴伺服电机系统的运动控制,实现rs-485通信、控制电机运行至指定位置、读取电机运行参数、与上位机通讯并执行相关指令等功能,并具有可扩展性。
附图说明
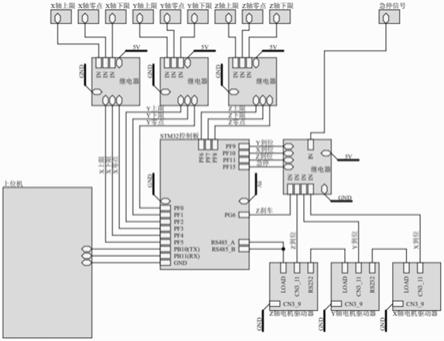
18.图1是三轴伺服电机控制系统整体架构图
19.图2是三轴伺服电机连接关系图
20.图3是电机控制软件三轴伺服电机控制程序整体结构图
21.图4是三轴伺服电机与单片机主控板关系结构图
22.图5是三轴伺服电机控制程序主函数程序流程图
具体实施方式
23.下面结合具体实施例对本实用新型进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本实用新型,但不以任何形式限制本实用新型。应当指出的是,对本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进。这些都属于本实用新型的保护范围。
24.图1为本实用新型的整体架构,电机控制部分利用硬石科技的ys4
‑ꢀ
prostm32开发板实现,负责对三轴电机进行控制。外围部分通过四块24v四路继电器模块进行信号隔离输入。
25.电机控制采用板上自带的uart转rs-485模块输出a、b两线信号串接三个型号为tsda-c12b的伺服电机驱动器,并由驱动器对三台伺服电机进行控制。
26.在三轴的导轨上分别安装有九个光电式限位开关,用于给出电机的限位与回零信号,此外电机驱动器上也引出了三个电机到位信号,用于指示三台电机是否走到给定位置,还有一路急停信号用于机器在运行过程中的紧急停止。所有信号通过四块继电器进行隔离输入到stm32中。当各限位开关被接通或关断时会给出控制信号,并由stm32接收处理用于控制电机运行。
27.为防止电磁干扰对信号造成影响,各信号均通过继电器进行隔离并输入至 stm32,其中各导轨限位开关以及电机驱动器到位信号均为低电平有效。当信号有效,继电器导通,并将板载5v或gnd输入到信号io端口,借此实现信号输入。
28.在控制电路各个部分的接线过程中,均需要共地,接地是为了使整个系统具有共同的零电位参考平面,并使整个系统正常工作。它不仅是保护设备和人身安全的必要手段,还是抑制emi和改善系统emc的关键。正确的接地可以为干扰信号提供低阻抗电路,使各信号能够正确的工作,这是抑制干扰和解决大多数 emc问题的最有效方法。
29.stm32使用uart串口与上位机通讯,由于stm32内部并没有rs-485通讯功能,故采
用探索者开发板上自带的sp3485芯片作为收发器件,该芯片可实现串口到rs-485的转换。
30.系统整体供电部分需要三种开关电源,分别是12v、24v、48v,其中12v用于供给限位开关工作,24v用于供给继电器工作,48v用于供给电机驱动器工作,由于电机驱动器需要驱动电机,因此需要选取大功率电源。控制板供电采用自带变压器。
31.控制板与电机驱动器的连接采用串联式组网,其示意图如图2所示,需要注意的是在电机驱动器上的rs-485接口,其中标有“rs232”的为输入口,标有“load”的为输出口。
32.主控芯片采用stm32f407zgt6,该伺服电机控制程序基于toda电机经销商华创商城提供的模板程序进行编写,开发环境采用keil v5,采用的modbus 通讯协议参照“gb/z 19582.1-2004基于modbus协议的工业自动化网络规范-第一部分”与“tsda-c12b低压伺服用户手册”进行编写实现,程序包括主程序与中断共两部分,软件架构如图3所示。
33.该程序整体实现的功能包含以下几点:
34.(1)modbus-rtu协议通信:根据“tsda-c12b低压伺服用户手册”的寄存器功能定义表与通信帧使用示例进行相应的配置和操作。
35.(2)与上位机uart串口通信:根据自行定义的“上位机控制机器协议帧”实现对八种类型帧的接收与解析,并对电机驱动器进行相应的控制或数据读取。
36.(3)systick定时器中断:通过配置systick定时器中断实现对接收数据的轮询以及对io口状态的监控。
37.(4)上位机数据解析模块:通过串口2接收上位机发送的信息,并解析为八种类型帧,转到各个模块执行对应的操作。
38.(5)上位机响应模块:对上位机发送的数据进行统一回复或对特定信息请求帧进行特定回复。
39.(6)机器控制模块:程序接收到上位机发送的数据帧后解析为相应的操作,并统一使用03指令,06指令,10指令对相应的寄存器执行相应的配置,通过串口3与板载uart转rs-485芯片进行通信,进而对电机驱动器进行控制。
40.(7)机器返回数据接收模块:程序接收机器发送的相应指令的回复帧,并进行解析,得到相关数据并回复上位机。
41.(8)io口信号监控模块:在主函数中由systick定时器给出定时信号,并执行对相关io口的扫描监控,分别包括对三轴的上下限位信号,归零点信号,移动到位信号进行扫描,并执行相应的动作。
42.(9)串口打印输出模块:通过串口1打印程序各部分调试信息,通过在主函数中轮询一个消息队列进行打印。
43.电机的控制模式为由上位机做主机,stm32做从机,由上位机发送控制信号给stm32,并由stm32做主机,电机驱动器做从机,由stm32发送控制信号给电机驱动器。在stm32中完成对上位机指令的解析与电机驱动器的控制,并接收电机驱动器的返回帧与向上位机发送返回帧。由于三轴电机均为串接在rs485 总线上,整体框架如图4所示。
44.主函数程序流程图如图5所示,stm32上电后进行硬件初始化,包括gpio 口初始化,定时器初始化,串口初始化,电机上电初始化。硬件配置成功后循环执行:上位机通讯串口轮询,串口1消息队列轮询,io端口扫描。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1