一种基于激光SLAM的消毒机器人控制装置
一种基于激光slam的消毒机器人控制装置
技术领域
1.本实用新型涉及计算机导航的技术领域,具体而言,涉及一种基于激光slam的消毒机器人控制装置。
背景技术:
2.slam,即时定位与地图构建,或并发建图与定位。1986年,rajachatila,oliverfaugers和randelsmith等人在国际机器人与自动化大会(icra)上首次提出了slam这一概念。经过30多年研究积淀slam技术在国外诞生了许多的优秀思路和算法。如,2002年
3.michael,sebastian等人提出了fastslam技术;2006年dellaertfrank,kaessmichael提出一种称为平方根平滑构图的平滑方法来改善移动机器人的构图过程,这一技术有效地改善了slam问题的构图过程。通过匹配直线特征,删减合并多重地图线段,大量降低地图数据量并实现了室内二维高精度地图绘制。
4.而slam技术的粒子滤波领域、提高slam的数据关联实时性也取得突破性进展。激光slam技术已发展30多年,许多理论研究实现了产业化,广泛用于钢业生产、军事勘察、太空探索等领域。slam技术目前已广泛运用在无人车,无人机,vr和ar等技术领域。随着人工智能机器人的兴起,slam技术以指数级别的速度发展着,如今slam技术围绕错误率、精度和位姿估测仍在进行有效的提升。
5.目前,在消毒机器人的自动化水平低,没有运用到slam技术。
技术实现要素:
6.基于此,为了目前消毒机器人自动化水平不高,没有运用slam技术的问题,本实用新型提供了一种基于激光slam的消毒机器人控制装置,其具体技术方案如下:
7.一种基于激光slam的消毒机器人控制装置,包括车体、驱动模块、视觉构图模块、电源模块、感应测距模块、主控模块和消毒模块,所述车体上设置有车轮,所述驱动模块与所述车轮连接,所述驱动模块和主控模块设置于所述车体内,所述主控模块与所述驱动模块、视觉构图模块、电源模块、感应测距模块和消毒模块连接,所述视觉构图模块包括ccd摄像头,所述ccd摄像头固定于所述车体,所述ccd摄像头与所述主控模块连接,所述感应测距模块包括激光感应组件,所述感应组件设置于所述车体,所述消毒模块可转动的设置于所述车体上端,所述电源模块设置于车体。
8.上述方案中,通过激光感应组件收集自然场景的数据,通过主控模块,结合激光slam技术,实时构建激光地图,再通过得到的激光地图规划路径,将信号传输给所述驱动模块控制车轮移动,并结合ccd摄像头对场景进行识别文本信息并完成喷洒工作,从而实现机器人的自主移动、环境数据检测、激光地图的构建、图像信息采集与传输、消毒液体喷洒等功能。保证了消毒机器人最大的灵活性和自由机动性,地图构建的实时性和消毒工作更加完善。
9.进一步地,所述消毒模块包括旋转组件、消毒箱和喷头,所述旋转组件固定于所述
车体内,所述旋转组件的动力输出端与所述消毒箱连接,所述消毒箱内装有消毒液,所述喷头设置于所述消毒箱。
10.进一步地,所述旋转组件包括旋转马达、轴承和旋转轴,所述旋转马达的动力输出端通过所述轴承与所述旋转轴的一端连接,所述旋转轴的另一端与所述消毒箱连接,所述旋转马达与所述主控模块连接。
11.进一步地,所述消毒模块还包括加热箱,所述加热箱与所述消毒箱连接,所述加热箱内设有加热组件。
12.进一步地,所述加热组件包括加热电阻,所述加热电阻与所述电源模块连接。
13.进一步地,所述激光感应组件包括4个激光雷达,4个所述激光雷达分别设置于所述车体的四个侧面。
14.进一步地,所述主控模块包括主控芯片、惯性传感器和轮式里程计,所述惯性传感器和轮式里程计与所述主控芯片连接。
15.进一步地,所述主控模块还包括稳压器,所述ccd摄像头通过所述稳压器与所述主控芯片连接。
16.进一步地,所述车轮为麦克纳姆轮。
17.进一步地,所述稳压器为ams1117-3.3稳压器。
附图说明
18.从以下结合附图的描述可以进一步理解本实用新型。图中的部件不一定按比例绘制,而是将重点放在示出实施例的原理上。在不同的视图中,相同的附图标记指定对应的部分。
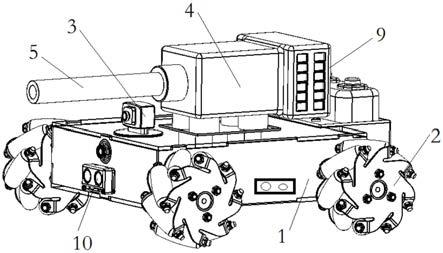
19.图1是本技术一实施例中的一种基于激光slam的消毒机器人控制装置的结构示意图之一;
20.图2是本技术一实施例中的一种基于激光slam的消毒机器人控制装置的结构示意图之二。
21.图3是本技术一实施例中的一种基于激光slam的消毒机器人控制装置的局部结构示意图。
22.附图标记说明:1、车体;2、车轮;3、ccd摄像头;4、消毒箱;5、喷头;6、旋转马达;7、轴承;8、旋转轴;9、加热箱;10、激光雷达。
具体实施方式
23.为了使得本实用新型的目的、技术方案及优点更加清楚明白,以下结合其实施例,对本实用新型进行进一步详细说明。应当理解的是,此处所描述的具体实施方式仅用以解释本实用新型,并不限定本实用新型的保护范围。
24.需要说明的是,当元件被称为“固定于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式。
25.除非另有定义,本文所使用的所有的技术和科学术语与属于本实用新型的技术领
域的技术人员通常理解的含义相同。本文中在本实用新型的说明书中所使用的术语只是为了描述具体的实施方式的目的,不是旨在于限制本实用新型。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
26.本实用新型中所述“第一”、“第二”不代表具体的数量及顺序,仅仅是用于名称的区分。
27.如图1、2所示,是本实用新型一实施例中的一种基于激光slam的消毒机器人控制装置,包括车体1、驱动模块、视觉构图模块、电源模块、感应测距模块、主控模块和消毒模块,所述车体1上设置有车轮2,所述驱动模块与所述车轮2连接,所述驱动模块和主控模块设置于所述车体1 内,所述主控模块与所述驱动模块、视觉构图模块、电源模块、感应测距模块和消毒模块连接,所述视觉构图模块包括ccd摄像头3,所述ccd摄像头3固定于所述车体1,所述ccd摄像头3与所述主控模块连接,所述感应测距模块包括激光感应组件,所述感应组件设置于所述车体1,所述消毒模块可转动的设置于所述车体1上端,所述电源模块设置于车体1。
28.上述方案中,通过激光感应组件收集自然场景的数据,通过主控模块,结合激光slam技术,实时构建激光地图,再通过得到的激光地图规划路径,将信号传输给所述驱动模块控制车轮2移动,并结合ccd摄像头3对场景进行识别文本信息并完成喷洒工作,从而实现机器人的自主移动、环境数据检测、激光地图的构建、图像信息采集与传输、消毒液体喷洒等功能。保证了消毒机器人最大的灵活性和自由机动性,地图构建的实时性和消毒工作更加完善。
29.在其中一个实施例中,所述消毒模块包括旋转组件、消毒箱4和喷头 5,所述旋转组件固定于所述车体1内,所述旋转组件的动力输出端与所述消毒箱4连接,所述消毒箱4内装有消毒液,所述喷头5设置于所述消毒箱4。通过所述旋转组件驱动所述旋转箱转动。
30.如图3所示,在其中一个实施例中,所述旋转组件包括旋转马达6、轴承7和旋转轴8,所述旋转马达6的动力输出端通过所述轴承7与所述旋转轴8的一端连接,所述旋转轴8的另一端与所述消毒箱4连接,所述旋转马达6与所述主控模块连接。
31.在其中一个实施例中,所述消毒模块还包括加热箱9,所述加热箱9 与所述消毒箱4连接,所述加热箱9内设有加热组件。有需要时,通过所述加热箱9对所述消毒箱4内的消毒液进行加热,加快分子扩散速度,从而达到更快的消毒效果。
32.在其中一个实施例中,所述加热组件包括加热电阻,所述加热电阻与所述电源模块连接。通过所述加热电阻进行加热。
33.在其中一个实施例中,所述激光感应组件包括4个激光雷达,4个所述激光雷达分别设置于所述车体1的四个侧面。通过所述激光雷达收集自然场景的数据,通过主控模块,结合激光slam技术,实时构建激光地图。
34.在其中一个实施例中,所述主控模块包括主控芯片、惯性传感器和轮式里程计,所述惯性传感器和轮式里程计与所述主控芯片连接。通过所述惯性传感器和轮式里程计记录车体1的行驶状态并反馈给所述主控芯片。
35.在其中一个实施例中,所述主控模块还包括稳压器,所述ccd摄像头 3通过所述稳压器与所述主控芯片连接。
36.在其中一个实施例中,所述车轮2为麦克纳姆轮。
37.在其中一个实施例中,所述稳压器为ams1117-3.3稳压器。
38.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
39.以上所述实施例仅表达了本实用新型的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。因此,本实用新型专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1