一种落地瓜果收集小车的控制系统
1.本实用新型涉及一种收集小车的控制系统,更具体的说,尤其涉及一种落地瓜果收集小车的控制系统。
背景技术:
2.随着现代农业的发展,运用智能控制技术、传感器技术、物联网技术等先进手段来促进农业设施智能化发展,以求自动化、智能化、信息化的同时更好的服务于现代农业成为发展趋势。
3.瓜果的规模化种植也逐步完善,但是,在目前的现代果业生产过程中有出现瓜熟落地而无法及时拾取导致瓜果腐烂的现象,不仅对种植户造成一定的损失,而且还产生一定的浪费,瓜果收获量还有进一步提升的可能。
技术实现要素:
4.本实用新型为了克服上述技术问题的缺点,提供了一种落地瓜果收集小车的控制系统。
5.本实用新型的落地瓜果收集小车的控制系统,落地瓜果收集小车的控制系统由小车车体及设置于小车车体上的六轴机械臂、超声波传感器、机器视觉模块和控制系统组成,小车车体上设置有四个车轮,小车的四个车轮分别经四个小车直流电机单独驱动,六轴机械臂上设置有驱使其工作的六个伺服电机;超声波传感器设置于小车的前端,机器视觉模块用于采集地面图像;其特征在于:所述控制系统由微控制器及与其相连接的电源模块、电机驱动模块、六轴机械臂伺服电机模块、gsm/gprs模块和gps/北斗定位模块,超声波传感器和机器视觉模块的输出端均与微控制器的输入端相连接;微控制器经gsm/gprs模块接收上位机发送的规划路径信息,经gps/北斗定位模块获取自身的地理位置信息,经电机驱动模块对四个小车直流电机的驱使,控制落地瓜果收集小车按规划路径行驶,经超声波传感器检测障碍物信息,经机器视觉模块识别出地面上的落地瓜果,经六轴机械臂伺服电机模块驱使六轴机械臂将识别出的地面上瓜果捡拾起来。
6.本实用新型的落地瓜果收集小车的控制系统,所述电源模块用于给微控制器、gsm/gprs模块、gps/北斗定位模块、电机驱动模块、超声波传感器、机器视觉模块和六轴机械臂伺服电机模块提供工作所需的直流电源,电源模块由12v电源模块、12v转5v电源模块和5v转3.3v电源模块组成。
7.本实用新型的落地瓜果收集小车的控制系统,所述微控制器采用型号为stm32f103c8t6的单片机,单片机stm32f103c8t6的vdda、vdd_1、vdd_2、vdd_3引脚均接于3.3v直流电源上,vss_1、vss_2、vss_3引脚均接地。
8.本实用新型的落地瓜果收集小车的控制系统,所述gsm/gprs模块采用型号为sim800c的芯片,芯片sim800c的5v引脚接于5v电源的正极,gnd引脚接地,rxd引脚和txd引脚分别接于单片机stm32f103c8t6的pa9、pa10引脚上;所述gps/北斗定位模块采用型号为
atgm332d-5n-31的芯片,芯片atgm332d-5n-31的vcc引脚接于5v电源的正极,gnd引脚接地,txd引脚和rxd引脚分别接于单片机stm32f103c8t6的pb13、pb12引脚上,pps引脚悬空。
9.本实用新型的落地瓜果收集小车的控制系统,所述机器视觉模块采用型号为openmv4 cam h7的芯片,芯片openmv4 cam h7的3.3v引脚接于3.3v电源的正极,gnd引脚接地,tx引脚和rx引脚分别接于单片机stm32f103c8t6的pb15、pb14引脚上,其余引脚悬空;所述超声波传感器采用型号为hc-sr04的芯片,芯片hc-sr04的vcc引脚和gnd引脚分别接于5v电源正极和地上,trig引脚和echo引脚分别接于单片机stm32f103c8t6的pb0引脚和pb1引脚上。
10.本实用新型的落地瓜果收集小车的控制系统,所述小车车体左侧的前后两个车轮分别经m1、m2小车直流电机驱动,右侧的前后两个车轮分别经m3、m4小车直流电机驱动,所述电机驱动模块采用型号为l298n的芯片,芯片l298n的vin引脚和5v引脚分别接于12v电源正极和5v电源正极上,gnd引脚接地,in1、in2、in3、in4引脚分别接于单片机stm32f103c8t6的pb3、pb4、pb5、pb6引脚上,a+引脚、a-引脚分别接于小车直流电机m1和m2的两端,b+引脚、b-引脚分别接于小车直流电机m3和m4的两端;
11.所述六轴机械臂上的六个伺服电机分别为s1、s2、s3、s4、s5、s6,六个伺服电机的vcc引脚和gnd引脚分别接于5v电源正极和地上,伺服电机s1、s2、s3、s4、s5、s6的d引脚分别接于单片机stm32f103c8t6的pa1、pa2、pa3、pa4、pa5、pa6引脚上。
12.本实用新型的落地瓜果收集小车的控制系统,所述12v电源模块由12v蓄电池bt1构成,bt1的负极接地,正极形成12v直流电源正极;所述12v转5v电源模块采用电压转换芯片lm7805,芯片lm7805的输入端vin接于12v电源正极,输出端形成5v直流电源正极;所述5v转3.3v电源模块采用电压转换芯片ams1117,芯片ams1117的输入端vin接于5v电源正极上,输出端vout形成3.3直流电压正极。
13.本实用新型的落地瓜果收集小车的控制系统,包括电源指示电路、复位电路、boot模式配置电路和usb-micro接口电路,所述电源指示电路由发光二极管d1和电阻r1组成,d1的正极接于3.3v电源的正极,负极经r1接地;所述复位电路由电阻r2、电容c2和按键sw1组成,电容c2的一端接地,另一端经电阻r2接于3.3v电源的正极,按键sw1与电容c2并联,电容c2与电阻r3的连接处接于单片机stm32f103c8t6的nrst引脚上;所述boot模式配置电路由3
×
2插件p1、电阻r3和电阻r4组成,插件p1的1号引脚和2号引脚接于3.3v电源正极,5号引脚和6号引脚均接地,3号、4号引脚分别经电阻r3、电阻r4接于单片机stm32f103c8t6的boot0引脚和boot1引脚上;
14.所述usb-micro接口电路采用型号为usb-micro接口p3,usb-micro接口的vbus引脚接于5v电源正极,id引脚和g引脚均接地,d-引脚和d+引脚分别经电阻r5和电阻r6接于单片机stm32f103c8t6的pa11引脚和pa12引脚上。
15.本实用新型的落地瓜果收集小车的控制系统,包括swd接口电路和晶振电路,晶振电路中设置有振动频率为32.768mhz的晶振y1和振动频率为1mhz的晶振y2。
16.本实用新型的有益效果是:本实用新型的落地瓜果收集小车的控制系统,落地瓜果收集小车的车体上设置有微控制器及与其相连接的gsm/gprs模块、gps/北斗定位模块、超声波传感器、电机驱动模块、机器视觉模块、六轴机械臂伺服电机模块,微控制器经gsm/gprs模块与远端上位机或智能移动终端的通讯以获取规划路径,经gps/北斗定位模块获取
自身的地理位置信息,并经电机驱动模块驱使收集小车按照规划路径行驶,经机器视觉模块获取地面上的落地瓜果信息,经六轴机械臂伺服电机模块驱使机械臂将落在地上的瓜果自动捡拾起来,解决了现有落地瓜果由于捡拾不及时所导致的腐烂变质的问题,为现代果业的发展提供了有力的帮助,既解决了农业劳动力不足的问题,又避免了瓜果腐烂所导致的浪费问题,有益效果显著,适于应用推广。
附图说明
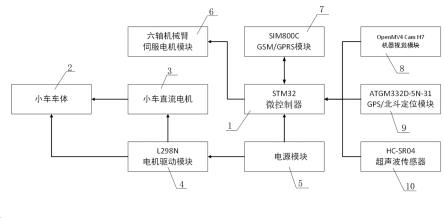
17.图1为本实用新型的落地瓜果收集小车的控制系统的原理图;
18.图2为本实用新型中微控制器的电路图;
19.图3为本实用新型中gsm/gprs模块的电路图;
20.图4为本实用新型中机器视觉模块的电路图;
21.图5为本实用新型中gps/北斗定位模块的电路图;
22.图6为本实用新型中超声波传感器的电路图;
23.图7为本实用新型中电机驱动模块的电路图;
24.图8为本实用新型中小车车轮的四个小车直流电机的驱动电路图;
25.图9为本实用新型中六轴机械臂伺服电机模块的电路图;
26.图10为本实用新型中12v电源模块的电路图;
27.图11为本实用新型中12v转5v电源模块的电路图;
28.图12为本实用新型中5v转3.3v电源模块的电路图;
29.图13为本实用新型中微控制器的电源指示电路的电路图;
30.图14为本实用新型中微控制器的复位电路的电路图;
31.图15为本实用新型中微控制器的boot模式配置电路的电路图;
32.图16为本实用新型中微控制器的usb-micro接口电路的电路图;
33.图17为本实用新型中微控制器的swd接口电路的电路图;
34.图18为本实用新型中微控制器的晶振电路的电路图。
35.图中:1微控制器,2小车车体,3小车直流电机,4电机驱动模块,5电源模块,6六轴机械臂伺服电机模块,7 gsm/gprs模块,8机器视觉模块,9 gps/北斗定位模块,10超声波传感器。
具体实施方式
36.下面结合附图与实施例对本实用新型作进一步说明。
37.如图1所示,给出了本实用新型的落地瓜果收集小车的控制系统的原理图,落地瓜果收集小车上设置有四个车轮,四个车轮均通过一个小车直流电机3驱动,以驱使小车进行前进、后端和转向行驶。小车车体1上还设置有六轴机械臂、超声波传感器10、机器视觉模块8和控制系统,控制系统由微控制器1及与其相连接的电机驱动模块4、六轴机械臂伺服电机模块6、gsm/gprs模块7和gps/北斗定位模块9组成,超声波传感器10和机器视觉模块8的输出均与微控制器1的输入端相连接,微控制器1具有信号采集、数据运算和控制输出的作用。
38.超声波传感器10设置于小车车体2的前端,用于对车体前端是否存在障碍物进行检测,机器视觉模块8用于采集地面图像并识别出是否有落地瓜果存在,六轴机械臂用于将
地面上的落地瓜果捡拾起来。微控制器1经电机驱动模块4驱使小车直流电机3进行工作,以驱使落地瓜果收集小车按照规划路径行驶。微控制器1经gsm/gprs模块与上位机或智能终端(智能手机)相通讯,以获取规划路径信息,经gps/北斗定位模块9获取自身的地理位置信息,并通过控制小车按照规划路径行驶。
39.这样,落地瓜果收集小车在获取了规划的行驶路径之后,通过驱使4个小车直流电机3的工作控制其按照规划路径行驶,并通过实时获取自身的位置信息来对行驶路径进行跟踪,同时经机器视觉模块8采集图像信息并识别出落地瓜果,并经六轴机械臂将识别出的落地瓜果捡拾起来,以避免落地瓜果捡拾不及时所导致的腐烂、变质问题。
40.如图2所示,给出了本实用新型中微控制器的电路图,微控制器1采用型号为stm32f103c8t6的单片机,单片机stm32f103c8t6的vdda、vdd_1、vdd_2、vdd_3引脚均接于3.3v直流电源上,vss_1、vss_2、vss_3引脚均接地。单片机stm32f103c8t6的相应引脚与相应模块的输入或输出相连接,以实现具体的功能。
41.如图3所示,给出了本实用新型中gsm/gprs模块的电路图,所示的gsm/gprs模块采用型号为sim800c的芯片,芯片sim800c的5v引脚接于5v电源的正极,gnd引脚接地,rxd引脚和txd引脚分别接于单片机stm32f103c8t6的pa9、pa10引脚上;微控制器1经gsm/gprs模块与上位pc机或智能终端的通信,以获取规划路径。
42.如图4所示,给出了本实用新型中机器视觉模块的电路图,所示的机器视觉模块采用型号为openmv4 cam h7的芯片,芯片openmv4 cam h7的3.3v引脚接于3.3v电源的正极,gnd引脚接地,tx引脚和rx引脚分别接于单片机stm32f103c8t6的pb15、pb14引脚上,其余引脚悬空;微控制器1经芯片openmv4 cam h7获取行驶路径上地面上的图像数据,并自动识别出图像中的落地瓜果。
43.如图5所示,给出了本实用新型中gps/北斗定位模块的电路图,所示的gps/北斗定位模块9采用型号为atgm332d-5n-31的芯片,芯片atgm332d-5n-31的vcc引脚接于5v电源的正极,gnd引脚接地,txd引脚和rxd引脚分别接于单片机stm32f103c8t6的pb13、pb12引脚上,pps引脚悬空。微控制器1经gps/北斗定位模块9实时获取自身的地理位置坐标,以保证小车按照规划路径行驶。
44.如图6所示,给出了本实用新型中超声波传感器的电路图,所示的超声波传感器10采用型号为hc-sr04的芯片,芯片hc-sr04的vcc引脚和gnd引脚分别接于5v电源正极和地上,trig引脚和echo引脚分别接于单片机stm32f103c8t6的pb0引脚和pb1引脚上。微控制器1经超声波传感器10检测前方是否有障碍物存在,当有障碍物存在时进行避障操作。
45.如图7所示,给出了本实用新型中电机驱动模块的电路图,图8给出了本实用新型中小车车轮的四个小车直流电机的驱动电路图,小车车体2左侧的前后两个车轮分别经m1、m2小车直流电机驱动,右侧的前后两个车轮分别经m3、m4小车直流电机驱动。电机驱动模块4采用型号为l298n的芯片,芯片l298n的vin引脚和5v引脚分别接于12v电源正极和5v电源正极上,gnd引脚接地,in1、in2、in3、in4引脚分别接于单片机stm32f103c8t6的pb3、pb4、pb5、pb6引脚上,a+引脚、a-引脚分别接于小车直流电机m1和m2的两端,b+引脚、b-引脚分别接于小车直流电机m3和m4的两端。这样,微控制器1通过对四个小车直流电机m1、m2、m3、m4驱动,即可控制小车进行前进、后退和转向,以控制小车按照规划路径行驶。
46.如图9所示,给出了实用新型中六轴机械臂伺服电机模块的电路图,六轴机械臂上
的六个伺服电机分别为s1、s2、s3、s4、s5、s6,六个伺服电机的vcc引脚和gnd引脚分别接于5v电源正极和地上,伺服电机s1、s2、s3、s4、s5、s6的d引脚分别接于单片机stm32f103c8t6的pa1、pa2、pa3、pa4、pa5、pa6引脚上。微控制器1经六轴机械臂伺服电机模块6驱使六轴机械臂将地上的落地瓜果捡拾起来。
47.如图10所示,给出了本实用新型中12v电源模块的电路图,图11给出了本实用新型中12v转5v电源模块的电路图,图12给出了本实用新型中5v转3.3v电源模块的电路图,所示的12v电源模块由12v蓄电池bt1构成,bt1的负极接地,正极形成12v直流电源正极。所示的12v转5v电源模块采用电压转换芯片lm7805,芯片lm7805的输入端vin接于12v电源正极,输出端形成5v直流电源正极。所示的5v转3.3v电源模块采用电压转换芯片ams1117,芯片ams1117的输入端vin接于5v电源正极上,输出端vout形成3.3直流电压正极。
48.如图13所示,给出了本实用新型中微控制器的电源指示电路的电路图,电源指示电路用于指示微控制器1的电源供电是否正常,电源指示电路由发光二极管d1和电阻r1组成,d1的正极接于3.3v电源的正极,负极经r1接地。
49.如图14所示,给出了本实用新型中微控制器的复位电路的电路图,所示的复位电路由电阻r2、电容c2和按键sw1组成,电容c2的一端接地,另一端经电阻r2接于3.3v电源的正极,按键sw1与电容c2并联,电容c2与电阻r3的连接处接于单片机stm32f103c8t6的nrst引脚上。当按键sw1被按下时,电容c2与电阻r3的连接处被置为低电平,单片机stm32f103c8t6的nrst引脚也为低电平,致使微控制器进行复位。
50.如图15所示,给出了本实用新型中微控制器的boot模式配置电路的电路图,所示的boot模式配置电路由3
×
2插件p1、电阻r3和电阻r4组成,插件p1的1号引脚和2号引脚接于3.3v电源正极,5号引脚和6号引脚均接地,3号、4号引脚分别经电阻r3、电阻r4接于单片机stm32f103c8t6的boot0引脚和boot1引脚上。通过将boot0、boot1配置为不同的高、低电平组合,可使微控制器进行不同的模式启动。
51.如图16所示,给出了本实用新型中微控制器的usb-micro接口电路的电路图,所示的usb-micro接口电路采用型号为usb-micro接口p3,usb-micro接口的vbus引脚接于5v电源正极,id引脚和g引脚均接地,d-引脚和d+引脚分别经电阻r5和电阻r6接于单片机stm32f103c8t6的pa11引脚和pa12引脚上。
52.如图17所示,给出了本实用新型中微控制器的swd接口电路的电路图,其包括swd接口p2和104电容c1。swd接口p2的4引脚与104电容c1的一端电气连接并接3.3v电源,swd接口p2的1引脚与104电容c1的另一端电气连接并接地,swd接口p2的3引脚和2引脚分别与stm32f103v8t6芯片u1的swdio引脚和swdclk引脚电气连接。
53.如图18所示,给出了本实用新型中微控制器的晶振电路的电路图,其包括32.768mhz晶振y1、8mhz晶振y2、1m电阻r8、22p电容c3、22p电容c4、22p电容c5和22p电容c6。22p电容c3、22p电容c4、22p电容c5和22p电容c6的一端接地,22p电容c3的另一端与32.768mhz晶振y1的一端电气连接并与stm32f103v8t6芯片u1的pc14引脚电气连接,22p电容c4的另一端与32.768mhz晶振y1的另一端电气连接并与stm32f103v8t6芯片u1的pc15引脚电气连接,22p电容c5的另一端与8mhz晶振y2的一端电气连接并与stm32f103v8t6芯片u1的oscin引脚电气连接,22p电容c6的另一端与8mhz晶振y2的另一端电气连接并与stm32f103v8t6芯片u1的oscout引脚电气连接,1m电阻r8的两端分别与8mhz晶振y2的两端
电气连接。
54.本专利解决了背景技术中存在的缺陷,本专利达到了以下有益效果:
55.1.本专利中单片机分别与所述电源模块、传感器模块、无线通信模块、电机驱动模块、机器视觉模块和六轴机械臂模块进行电气连接;通过各传感器模块监测数据;通过机器视觉模块识别瓜果,通过六轴机械臂模块抓取瓜果,提供了一种操作简便、实时性高、工作稳定、功耗较低、精度高、效率高的智能的落地瓜果收集小车的硬件电路部分。
56.2.本专利在app上通过gsm/gprs无线通信模块下发小车的行驶路径。
57.3.本专利实现对小车的实时定位。
58.4.本专利实现对小车前方障碍物的超声波监测。
59.5.本专利实现对落地瓜果的机器视觉识别。
60.6.本专利实现对落地瓜果的抓取收集。
61.7.本专利使用可充电锂电池供电,绿色环保、可循环利用。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1