力学控制模块的制作方法
1.本实用新型涉及动态力学控制领域,具体涉及一种力学控制模块。
背景技术:
2.在工业现场的自动化设备中,需要使用动态力学控制模块,以完成协作机器人的关节扭力控制,压装力学控制,打磨力控制等应用。现有的力学控制模块存在的主要问题有:(1)只能单向接收传感器的信号,不能接收现场设备的开关量信号,无法对现场设备进行闭环控制;(2)无法根据传感器信号对现场设备进行开关量控制,使得现场设备存在手动调零的问题;(3)没有传感器断线报警功能,存在传感器接线意外断开造成的事故。
技术实现要素:
3.为了克服现有技术的不足,本实用新型的目的是提供一种力学控制模块,以解决现有技术存在的现场设备无法进行闭环控制、现场设备只能手动调零以及没有传感器断线报警功能的问题。
4.为了达到上述目的,本实用新型所采用的技术方案是:提供一种力学控制模块,用于协作机器人的关节扭力控制、压装力学控制、打磨力控制,包括主控单元、ad转换单元、信号处理单元、开关量输入单元、开关量输出单元、串口通信单元、报警单元以及电源单元;所述信号处理单元用于对传感器传送的传感器信号进行滤波整理,以抑制共模干扰信号;所述ad转换单元用于将从所述信号处理单元接收的所述传感器信号从传感器模拟信号转换为传感器数字信号后,传送至所述主控单元;所述开关量输入单元用于将从现场设备接收的开关信号传送至所述主控单元;所述开关量输出单元用于将从所述主控单元接收的控制信号传送至所述现场设备;所述串口单元用于所述主控单元与上位机之间的数据通讯;所述报警单元用于输出从所述主控单元接收到的报警信号;所述主控单元用于对所述传感器数字信号和所述开关信号进行处理分析以生成所述控制信号和所述报警信号,所述控制信号为根据所述传感器数字信号和所述开关信号的分析结果需要所述现场设备执行的动作信号,所述报警信号为根据所述传感器数字信号分析结果判断所述传感器是否断线从而需要报警的信号;所述电源单元用于为传感器提供电源;
5.所述电源单元与所述传感器通过通用接口电性相连,所述传感器与所述信号处理单元通过通用接口电性相连,所述信号处理器与所述ad转换单元电性相连,所述主控单元分别与所述ad转换单元、所述报警单元、所述串口通信单元、所述开关量输入单元以及所述开关量输出单元电性相连,所述开关量输出单元、所述开关量输出单元还分别通过通用接口与所述现场设备电性相连,所述串口通信单元与上位机通过rs485/rs232通讯协议传送数据。
6.进一步地,所述主控单元包括主控芯片u7,三端稳压管uf3,极性电容e4,晶振y3,电容c6、c18、c24、c25,电阻r11、r202;所述主控芯片u7的引脚1连接引脚64,所述主控芯片u7的引脚43、引脚61、引脚63分别接地,所述主控芯片u7的引脚15、引脚52、引脚62分别接
3.3v,所述主控芯片u7的引脚14连接所述极性电容e4的正极,所述极性电容e4的负极接地,所述主控芯片u7的引脚51分别连接所述电容c24的一端和所述电容c25的一端,所述电容c24的另一端和所述电容c25的另一端分别接地,所述电容c24的一端还分别连接所述三端稳压管uf3的引脚1和引脚2,所述三端稳压管uf3的引脚2还连接所述电阻r202的一端,所述电阻r202的另一端接3.3v,所述三端稳压管uf3的引脚3接地,所述主控芯片u7的引脚58分别连接所述电阻r11的一端、所述晶振y3的一端以及所述电容c6的一端,所述电容c6的另一端接地,所述主控芯片u7的引脚59分别连接所述电阻r11的另一端、所述晶振y3的另一端以及所述电容c18的一端,所述电容c18的另一端接地;
7.所述主控芯片u7的引脚8连接端子an-sclk,为串行时间输入端;所述主控芯片u7的引脚6连接端子an-sdi,为串行数字接口;所述主控芯片u7的引脚9连接端子an-cs,为片选信号端;所述主控芯片u7的引脚46连接端子out1-in,所述主控芯片u7的引脚47连接端子out2-in,为开关量输入端;所述主控芯片u7的引脚48连接端子in1-out,为开关量输出端;所述主控芯片u7的引脚38连接端子rxd,为数据接收端;所述主控芯片u7的引脚37连接端子txd,为数据发送端;所述主控芯片u7的引脚29连接端子ee-cs,为报警信号输出端。
8.进一步地,所述信号处理单元包括共模滤波器lb2,电感器lb1、lb3,极性电容e3,电容ca1、ca2、ca3、ca4、cb1、cb2、cb3、cb4,电阻ra和rb;所述共模滤波器lb2在线路中能有效地抑制共模干扰信号,而对线路正常传输的差模信号无影响;所述共模滤波器lb2的引脚2连接所述传感器的信号接口正极,所述共模滤波器lb2的引脚4连接所述传感器的信号接口负极,所述共模滤波器lb2的引脚1分别连接所述电感器lb3的一端和所述电容ca1的一端,所述电容ca1的另一端依次与所述电容ca3的一端、所述电容ca2的一端以及所述电容ca4的一端相连后接地线e-gnd,所述电感器lb3的另一端依次与所述电容ca3的另一端和所述电容ca2的另一端相连后接所述电阻ra的一端,所述电阻ra的另一端分别连接所述电容ca4的另一端、端子an+、所述极性电容e3的正极,所述共模滤波器lb2的引脚3分别连接所述电感器lb1的一端和所述电容cb1的一端,所述电容cb1的另一端依次与所述电容cb3的一端、所述电容cb2的一端以及所述电容cb4的一端相连后接地线e-gnd,所述电感器lb1的另一端依次与所述电容cb3的另一端和所述电容cb2的另一端相连后接所述电阻rb的一端,所述电阻rb的另一端分别连接所述电容cb4的另一端、端子an-、所述极性电容e3的负极。
9.进一步地,所述ad转换单元包括模拟数字转换器u5,线性稳压器芯片u4,晶振y2,电容c13、c14、c35、c42,电阻r30、r31、r32、r34、rp2-a、rp2-b、rp2-c、rp2-d、r4;所述模拟数字转换器u5的引脚1连接所述端子an+,所述模拟数字转换器u5的引脚2连接所述电阻r4的一端后接所述端子an-,所述模拟数字转换器u5的引脚3连接所述电容c42的一端,所述模拟数字转换器u5的引脚4连接所述电容c42的另一端,所述模拟数字转换器u5的引脚5分别连接所述电容c13的一端和所述线性稳压器芯片u4的引脚5,所述电容c13的另一端和所述线性稳压器芯片u4的引脚2相连后分别连接所述电容c14的一端和地线e-gnd,所述线性稳压器芯片u4的引脚1和引脚3相连后分别连接所述电容c14的另一端和电压输出端e-vout,所述模拟数字转换器u5的引脚6和引脚16分别接地,所述模拟数字转换器u5的引脚9连接所述晶振y2的一端,所述模拟数字转换器u5的引脚10连接所述晶振y2的另一端,所述模拟数字转换器u5的引脚11连接所述电阻rp2-d的一端,所述电阻rp2-d的另一端连接所述端子an-sclk,所述模拟数字转换器u5的引脚12连接所述电阻rp2-c的一端,所述电阻rp2-c的另一
端连接所述电阻r4的一端,所述电阻r4的另一端接地,所述模拟数字转换器u5的引脚13连接所述电阻rp2-b的一端,所述电阻rp2-b的另一端连接所述端子an-sdi,所述模拟数字转换器u5的引脚14连接所述电阻rp2-a的一端,所述电阻rp2-a的另一端连接所述端子an-cs,所述模拟数字转换器u5的引脚15接3.3v,所述模拟数字转换器u5的引脚17分别连接所述电阻r33的一端和所述电阻r30的一端,所述电阻r33的另一端连接所述电阻r32的一端,所述电阻r32的另一端连接电压输出端e-vout,所述电阻r30的另一端连接地线e-gnd,所述模拟数字转换器u5的引脚18依次连接所述电阻r31的一端和所述电容c35的一端,所述电容c35的另一端和所述电阻r31的另一端相连后连接所述电阻r33的一端。
10.进一步地,所述开关量输入单元包括光电耦合器u8和u9,保险丝p2和p4,电容c16和c17,电阻r7、r21、r22、r23、r24、r9、r16、r13、r15、r14;
11.所述光电耦合器u8的引脚1分别连接所述电容c16的一端和所述电阻r7的一端,所述电阻r7的另一端连接所述端子out1-in,所述光电耦合器u8的引脚2连接所述电容c16的另一端后接地,所述光电耦合器u8的引脚3分别连接所述电阻r24的一端和所述电阻r23的一端,所述电阻r23的另一端接模拟地agnd,所述光电耦合器u8的引脚4分别连接所述电阻r21的一端和所述电阻r22的一端,所述电阻r21的另一端连接电压输出端out_v+,所述电阻r22的另一端和所述电阻r24的另一端相接后连接所述保险丝p2的一端,所述保险丝p2的另一端连接所述现场设备的信号输出接口out1;
12.所述光电耦合器u9的引脚1分别连接所述电容c17的一端和所述电阻r9的一端,所述电阻r9的另一端连接所述端子out2-in,所述光电耦合器u9的引脚2连接所述电容c17的另一端后接地,所述光电耦合器u9的引脚3分别连接所述电阻r15的一端和所述电阻r14的一端,所述电阻r14的另一端接模拟地agnd,所述光电耦合器u9的引脚4分别连接所述电阻r16的一端和所述电阻r13的一端,所述电阻r16的另一端连接电压输出端out_v+,所述电阻r13的另一端和所述电阻r15的另一端相接后连接所述保险丝p4的一端,所述保险丝p4的另一端连接所述现场设备的信号输出接口out2。
13.进一步地,所述开关量输出单元包括光电耦合器u10,电容c12、c15,电阻r8、r10;所述光电耦合器u10的引脚1连接所述电容c15的一端后接电压输出端out_v+,所述光电耦合器u10的引脚2分别连接所述电容c15的另一端和所述电阻r8的一端,所述电阻r8的另一端连接所述现场设备的信号输入接口in1,所述光电耦合器u10的引脚4分别连接所述端子in1-out、所述电阻r10的一端以及所述电容c12的一端,所述光电耦合器u10的引脚3连接所述电容c12的另一端后接地,所述电阻r10的另一端接3.3v。
14.进一步地,所述串口通信单元包括所述串口通信单元包括rs232芯片u3、rs485芯片u4、触点开关sw1、电阻r21、r22和r23;所述rs232芯片u3设有非门u21和u22;所述rs485芯片u4的接收器输出使能端re和驱动器输出使能端de相连后接所述端子rxd,所述rs485芯片u4的接收器输出端ro连接所述触点开关sw1的第二触点,所述rs485芯片u4的驱动器输入端di分别连接所述非门u22的输入端和所述端子txd,所述电阻r21的一端接端子,所述电阻r21的另一端连接所述电阻r22的一端,所述电阻r22的另一端连接所述电阻r23的一端,所述电阻r23的另一端接地,所述rs485芯片u4的输出端a连接所述电阻r21与所述电阻r22的连接点后连接上位机的数据接收接口,所述rs485芯片u4的输出端b连接所述电阻r22与所述电阻r23的连接点后连接上位机的数据发送接口,所述非门u21的输出端连接触点开关
sw1的第一触点,所述非门u21的输入端连接上位机的数据接收接口,所述非门u22的输入端连接上位机的数据发送接口。
15.进一步地,所述电源单元包括cmos运算放大器u121-a、u121-b,场效应管q120,三端稳压管u120,极性电容e122,电容c121、c122、c124,电阻r120、r121、r122、r123、r124、r125、r126;所述场效应管q120的源极连接供电电源正极,所述场效应管q120的栅极连接所述电阻r124的一端,所述场效应管q120的漏极连接所述电阻r120的一端,所述电阻r120的另一端分别连接所述电阻r121的一端和所述电容c124的一端,所述电容c124的另一端依次连接所述电容c121的一端和所述极性电容e122的正极后接电压输出端e-vout,所述极性电容e122的另一端依次连接所述电容c121的另一端和所述电阻r121的另一端,所述电阻r121的另一端还分别连接所述电阻r123的一端和所述cmos运算放大器u121-a的同相输入端,所述cmos运算放大器u121-a的反相输入端和输出端相连,所述电阻r123的一端还连接所述三端稳压管u120的引脚3,所述电阻r123的另一端和所述电阻r122的一端的连接点连接所述三端稳压管u120的引脚1,所述电阻r122的另一端分别连接所述三端稳压管u120的引脚2、所述电阻r125的一端以及所述cmos运算放大器u121-b的反相输入端,所述电阻r125的另一端连接供电电源负极,所述cmos运算放大器u121-b的同相输入端分别连接所述电容c122的一端和所述电阻r126的一端,所述电容c122的另一端和所述cmos运算放大器u121-b的输出端相连后接所述电阻r124的另一端,所述电阻r126的另一端连接所述电容c124的一端。
16.进一步地,所述报警单元包括扬声器sp1,极性电容e13,三极管q11、q12以及q13,电阻r18、r28、r93、r98、r99、r136;所述扬声器sp1连接所述电阻r97的一端,所述电阻r97的另一端连接所述极性电容e13的负极,所述极性电容e13的正极分别连接所述电阻r136的一端和所述三极管q11的发射极,所述三极管q11的发射极还接地,所述三极管q11的基极分别连接所述电阻r136的另一端和所述电阻r18的一端,所述电阻r18的另一端分别连接所述电阻r93的一端和所述三极管q13的基极,所述三极管q13的发射极与所述电阻r93的另一端相连后接5v,所述三极管q13的集电极连接所述电阻r98的一端,所述电阻r98的另一端连接所述电阻r99的一端,所述电阻r99的一端分别连接所述扬声器sp1的另一端和所述三极管q12的集电极,所述三极管q12的发射极接地,所述三极管q12的基极连接所述电阻r28的一端,所述电阻r28的另一端与所述三极管q11的基极相连后接所述端子ee-cs。
17.进一步地,所述主控芯片u7为超低功耗芯片,型号为nano100sd3bn。
18.与现有技术相比,本实用新型提供的力学控制模块,包括主控单元、ad转换单元、信号处理单元、开关量输入单元、开关量输出单元、串口通信单元、报警单元以及电源单元;电源单元与传感器通过通用接口电性相连,传感器与信号处理单元通过通用接口电性相连,信号处理器与ad转换单元电性相连,主控单元分别与ad转换单元、报警单元、串口通信单元、开关量输入单元以及开关量输出单元电性相连,开关量输出单元、开关量输出单元还分别通过通用接口与现场设备电性相连,串口通信单元与上位机通过rs485/rs232通讯协议传送数据;本实用新型能够对现场设备进行闭环控制和自动调零,并且具有传感器断线报警功能,从而解决了现有技术存在的现场设备无法进行闭环控制、现场设备只能手动调零以及没有传感器断线报警功能的问题。
附图说明
19.为了更清楚地说明本实用新型实施例中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
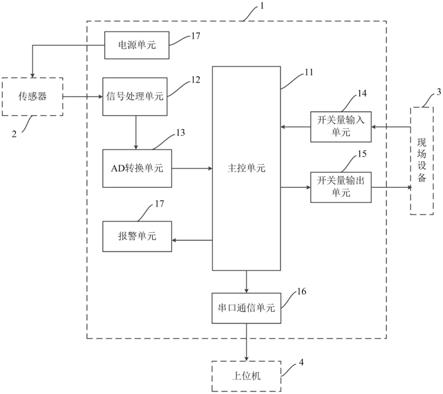
20.图1是本实用新型实施例提供的力学控制模块的系统组成框图。
21.图2是本实用新型实施例提供的力学控制模块的主控单元电路原理图。
22.图3是本实用新型实施例提供的力学控制模块的信号处理单元电路原理图。
23.图4是本实用新型实施例提供的力学控制模块的ad转换单元电路原理图。
24.图5是本实用新型实施例提供的力学控制模块的开关量输入单元电路原理图。
25.图6是本实用新型实施例提供的力学控制模块的开关量输出单元电路原理图。
26.图7是本实用新型实施例提供的力学控制模块的串口通信单元电路原理图。
27.图8是本实用新型实施例提供的力学控制模块的电源单元电路原理图。
28.图9是本实用新型实施例提供的力学控制模块的报警单元电路原理图。
29.上述图中的标记为1、力学控制模块;2、传感器;3、现场设备;4、上位机;11、主控单元;12、信号处理单元;13、ad转换单元;14、开关量输入单元;15、开关量输出单元;16、串口通信单元;17、报警单元。
具体实施方式
30.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
31.本实施例的附图中相同或相似的标号对应相同或相似的部件;在本实用新型的描述中,需要理解的是,若有术语“上”、“下”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此附图中描述位置关系的用语仅用于示例性说明,不能理解为对本专利的限制,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语的具体含义。
32.以下结合附图与具体实施例,对本实用新型的技术方案做详细的说明。
33.如图1至图9所示,为本实用新型提供的较佳实施例。
34.参照图1,本实施例提供的力学控制模块1,用于协作机器人的关节扭力控制、压装力学控制、打磨力控制,包括主控单元11、ad转换单元13、信号处理单元12、开关量输入单元14、开关量输出单元15、串口通信单元16、报警单元17以及电源单元;信号处理单元12用于对传感器2传送的传感器2信号进行滤波整理,以抑制共模干扰信号;ad转换单元13用于将从信号处理单元12接收的传感器2信号从传感器2模拟信号转换为传感器2数字信号后,传送至主控单元11;开关量输入单元14用于将从现场设备3接收的开关信号传送至主控单元11;开关量输出单元15用于将从主控单元11接收的控制信号传送至现场设备3;串口单元用于主控单元11与上位机4之间的数据通讯;报警单元17用于输出从主控单元11接收到的报警信号;主控单元11用于对传感器2数字信号和开关信号进行处理分析以生成控制信号和
gnd,电感器lb3的另一端依次与电容ca3的另一端和电容ca2的另一端相连后接电阻ra的一端,电阻ra的另一端分别连接电容ca4的另一端、端子an+、极性电容e3的正极,共模滤波器lb2的引脚3分别连接电感器lb1的一端和电容cb1的一端,电容cb1的另一端依次与电容cb3的一端、电容cb2的一端以及电容cb4的一端相连后接地线e-gnd,电感器lb1的另一端依次与电容cb3的另一端和电容cb2的另一端相连后接电阻rb的一端,电阻rb的另一端分别连接电容cb4的另一端、端子an-、极性电容e3的负极。
40.作为本实用新型的一种实施方式,参照图4,ad转换单元13包括模拟数字转换器u5,线性稳压器芯片u4,晶振y2,电容c13、c14、c35、c42,电阻r30、r31、r32、r34、rp2-a、rp2-b、rp2-c、rp2-d、r4;模拟数字转换器u5的引脚1连接端子an+,模拟数字转换器u5的引脚2连接电阻r4的一端后接端子an-,模拟数字转换器u5的引脚3连接电容c42的一端,模拟数字转换器u5的引脚4连接电容c42的另一端,模拟数字转换器u5的引脚5分别连接电容c13的一端和线性稳压器芯片u4的引脚5,电容c13的另一端和线性稳压器芯片u4的引脚2相连后分别连接电容c14的一端和地线e-gnd,线性稳压器芯片u4的引脚1和引脚3相连后分别连接电容c14的另一端和电压输出端e-vout,模拟数字转换器u5的引脚6和引脚16分别接地,模拟数字转换器u5的引脚9连接晶振y2的一端,模拟数字转换器u5的引脚10连接晶振y2的另一端,模拟数字转换器u5的引脚11连接电阻rp2-d的一端,电阻rp2-d的另一端连接端子an-sclk,模拟数字转换器u5的引脚12连接电阻rp2-c的一端,电阻rp2-c的另一端连接电阻r4的一端,电阻r4的另一端接地,模拟数字转换器u5的引脚13连接电阻rp2-b的一端,电阻rp2-b的另一端连接端子an-sdi,模拟数字转换器u5的引脚14连接电阻rp2-a的一端,电阻rp2-a的另一端连接端子an-cs,模拟数字转换器u5的引脚15接3.3v,模拟数字转换器u5的引脚17分别连接电阻r33的一端和电阻r30的一端,电阻r33的另一端连接电阻r32的一端,电阻r32的另一端连接电压输出端e-vout,电阻r30的另一端连接地线e-gnd,模拟数字转换器u5的引脚18依次连接电阻r31的一端和电容c35的一端,电容c35的另一端和电阻r31的另一端相连后连接电阻r33的一端。
41.作为本实用新型的一种实施方式,参照图5,开关量输入单元14包括光电耦合器u8和u9,保险丝p2和p4,电容c16和c17,电阻r7、r21、r22、r23、r24、r9、r16、r13、r15、r14;
42.光电耦合器u8的引脚1分别连接电容c16的一端和电阻r7的一端,电阻r7的另一端连接端子out1-in,光电耦合器u8的引脚2连接电容c16的另一端后接地,光电耦合器u8的引脚3分别连接电阻r24的一端和电阻r23的一端,电阻r23的另一端接模拟地agnd,光电耦合器u8的引脚4分别连接电阻r21的一端和电阻r22的一端,电阻r21的另一端连接电压输出端out_v+,电阻r22的另一端和电阻r24的另一端相接后连接保险丝p2的一端,保险丝p2的另一端连接现场设备3的信号输出接口out1;
43.光电耦合器u9的引脚1分别连接电容c17的一端和电阻r9的一端,电阻r9的另一端连接端子out2-in,光电耦合器u9的引脚2连接电容c17的另一端后接地,光电耦合器u9的引脚3分别连接电阻r15的一端和电阻r14的一端,电阻r14的另一端接模拟地agnd,光电耦合器u9的引脚4分别连接电阻r16的一端和电阻r13的一端,电阻r16的另一端连接电压输出端out_v+,电阻r13的另一端和电阻r15的另一端相接后连接保险丝p4的一端,保险丝p4的另一端连接现场设备3的信号输出接口out2。
44.作为本实用新型的一种实施方式,参照图6,开关量输出单元15包括光电耦合器
u10,电容c12、c15,电阻r8、r10;光电耦合器u10的引脚1连接电容c15的一端后接电压输出端out_v+,光电耦合器u10的引脚2分别连接电容c15的另一端和电阻r8的一端,电阻r8的另一端连接现场设备3的信号输入接口in1,光电耦合器u10的引脚4分别连接端子in1-out、电阻r10的一端以及电容c12的一端,光电耦合器u10的引脚3连接电容c12的另一端后接地,电阻r10的另一端接3.3v。
45.作为本实用新型的一种实施方式,参照图7,串口通信单元16包括串口通信单元16包括rs232芯片u3、rs485芯片u4、触点开关sw1、电阻r21、r22和r23;rs232芯片u3设有非门u21和u22;rs485芯片u4的接收器输出使能端re和驱动器输出使能端de相连后接端子rxd,rs485芯片u4的接收器输出端ro连接所述触点开关sw1的第二触点,rs485芯片u4的驱动器输入端di分别连接非门u22的输入端和端子txd,电阻r21的一端接端子,电阻r21的另一端连接电阻r22的一端,电阻r22的另一端连接电阻r23的一端,电阻r23的另一端接地,rs485芯片u4的输出端a连接电阻r21与电阻r22的连接点后连接上位机4的数据接收接口,rs485芯片u4的输出端b连接电阻r22与电阻r23的连接点后连接上位机4的数据发送接口,非门u21的输出端连接触点开关sw1的第一触点,非门u21的输入端连接上位机4的数据接收接口,非门u22的输入端连接上位机4的数据发送接口。
46.作为本实用新型的一种实施方式,参照图8,电源单元包括cmos运算放大器u121-a、u121-b,场效应管q120,三端稳压管u120,极性电容e122,电容c121、c122、c124,电阻r120、r121、r122、r123、r124、r125、r126;场效应管q120的源极连接供电电源正极,场效应管q120的栅极连接电阻r124的一端,场效应管q120的漏极连接电阻r120的一端,电阻r120的另一端分别连接电阻r121的一端和电容c124的一端,电容c124的另一端依次连接电容c121的一端和极性电容e122的正极后接电压输出端e-vout,极性电容e122的另一端依次连接电容c121的另一端和电阻r121的另一端,电阻r121的另一端还分别连接电阻r123的一端和cmos运算放大器u121-a的同相输入端,cmos运算放大器u121-a的反相输入端和输出端相连,电阻r123的一端还连接三端稳压管u120的引脚3,电阻r123的另一端和电阻r122的一端的连接点连接三端稳压管u120的引脚1,电阻r122的另一端分别连接三端稳压管u120的引脚2、电阻r125的一端以及cmos运算放大器u121-b的反相输入端,电阻r125的另一端连接供电电源负极,cmos运算放大器u121-b的同相输入端分别连接电容c122的一端和电阻r126的一端,电容c122的另一端和cmos运算放大器u121-b的输出端相连后接电阻r124的另一端,电阻r126的另一端连接电容c124的一端。
47.作为本实用新型的一种实施方式,参照图9,报警单元17包括扬声器sp1,极性电容e13,三极管q11、q12以及q13,电阻r18、r28、r93、r98、r99、r136;扬声器sp1连接电阻r97的一端,电阻r97的另一端连接极性电容e13的负极,极性电容e13的正极分别连接电阻r136的一端和三极管q11的发射极,三极管q11的发射极还接地,三极管q11的基极分别连接电阻r136的另一端和电阻r18的一端,电阻r18的另一端分别连接电阻r93的一端和三极管q13的基极,三极管q13的发射极与电阻r93的另一端相连后接5v,三极管q13的集电极连接电阻r98的一端,电阻r98的另一端连接电阻r99的一端,电阻r99的一端分别连接扬声器sp1的另一端和三极管q12的集电极,三极管q12的发射极接地,三极管q12的基极连接电阻r28的一端,电阻r28的另一端与三极管q11的基极相连后接端子ee-cs。
48.优选地,主控芯片u7为超低功耗芯片,型号为nano100sd3bn,工作主频达到43m,低
电压工作范围1.8v至3.6v,内建12mhz高精度晶振(1%准确度),备有丰富的外设,如定时器、看门狗定时器、rtc、pdma、uart、spi、i
2 c、i
2 s、pwm、12位adc、12位dac、iso-7816等。
49.优选地,共模滤波器lb2的型号为act45b;模拟数字转换器u5的型号为cs5530,具有带有超低噪声放大器;线性稳压器芯片u4的型号为tlv70218dbvt。
50.具体地,传感器2为力学传感器,现场设备3为工业仪表;rs232芯片u3和rs485芯片u4为已有的公开的产品,本领域技术人员根据本技术方案所描述的rs232芯片u3和rs485芯片u4功能能够轻易地找到同类产品实现。
51.以上对本实用新型的实施例进行了详细的说明,但本实用新型的创造并不限于本实施例,熟悉本领域的技术人员在不违背本实用新型精神的前提下,还可以做出许多同等变型或替换,这些同等变型或替换均包含在本技术的权利要求所限定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1