在工业自动化设施中调整故障安全的监控的制作方法
1.本发明涉及一种用于在工业自动化设施中调整故障安全的监控的方法以及一种工业自动化设施的移动部件的安全系统。
背景技术:
2.在现代生产设施中,传统的装配线越来越多地通过称为fts(无人驾驶运输系统)或者英文agv(自动导航车辆)的移动运输构件所取代。这些车辆通常沿着预设的路径移动,该路径通过地板上的彩色标记或嵌入地板中的电感或电容的轨迹引导装置来偏转。现代车辆也能够以传感器辅助的方式导航,使得路径一定程度仅虚拟存在并且车辆借助于环境中的各种传感器定向。相反于轨迹引导也能够动态绕过障碍物行驶的自由导航的车辆称为amr(自主移动机器人)。
3.用于agv或amr的优选的传感机构是激光扫描仪,激光扫描仪借助于激光射线的传播时间测量、很少情况下也借助于相移来测量环境。激光射线经由旋转镜转动,使得形成大的检测范围,典型的180度或甚至270度。激光扫描仪主要用作为安全装置,因为安全装置内部故障安全地构造。为此目的,为扫描仪提供限定的场区,扫描仪针对该场区监控违规并将其通过故障安全的输出信号或故障安全通信传输给更高级的、同样故障安全的控制器。
4.图1示出激光扫描仪在agv中的典型应用,左侧是矩形agv 101,其也必须监控侧面,右侧是旋转对称的agv 102,旋转对称的agv例如由于其差分运动学仅可向前或向回行进以及能够在原地转动,从而不需要对所有侧面进行全面的保护。以点绘出能够由相应的激光扫描仪130监控的区域110、120,例如最大可监控的区域。
5.在图1的下部以阴影的方式绘制导致相应的agv的减速或甚至停止的可能的监控区域或安全场区111、121。
6.除了在移动车辆处使用外,激光扫描仪还在静态的机器处使用,以便故障安全地识别例如有人接近,并且以便相应地完全或部分地关闭机器以避免危险。因此,激光扫描仪能够类似于光幕或光栅取代具有故障安全的门触点的机械屏障。
7.图2示出在现有技术中激光扫描仪和光幕在机器中的使用。在此,借助机械解决方案201保护三个侧面,并且借助激光扫描仪233或光幕211保护第四侧面,以便由此能够将材料或产品置入机器中或从机器中取出。在使用光幕的情况下,必须附加地保证:当光幕受损时,足够快地关闭机器。因此,部分地使用这两个所描述的光学安全装置的组合,以便利用激光扫描仪识别人类的接近,将机器、例如机器人减速到安全速度,并且借助光栅采用最终关闭,由于之前进行的减速也足够快地实现最终关闭。
8.在激光扫描仪被从机器旁边走过的人损坏的情况下,机器仅减速而不必停止生产。
9.在开头提到的现代生产设施中,这两种用途经常结合在一起,即机器通过激光扫描仪识别人接近,并且agv将材料或生产货物提供给机器。在此,是轨迹引导还是自由导航对于进一步的观察不重要。
10.迄今为止,agv刚好如人那样触发另一台(尤其静态的)机器的安全装置,特别是激光扫描仪和/或光幕,因此机器减慢移动过程或者完全关闭。如果例如应当加工工件而无需将所述工件从agv转载到机器中,则形成阻塞,因为当agv处于机器前部或其中时,机器由于安全装置受损而无法工作。
11.因此,如今,还使用不具有无接触的安全装置、例如激光扫描仪或光栅的机器,而是使用如栅栏或大门的机械,该机械为了agv的驶入和驶离而被打开但是在通过机器进行加工期间必须是闭合的。在此,必须借助于其他附加的传感机构或措施来确保:没有人类并行于agv进入机器或者能够进入机器。这是复杂的并且尤其难以实现,因为必须以经过认证故障安全方式将人识别为干扰对象。
12.此外,迄今以如下方式实施加工步骤执:即将工件从agv转载到机器中,使得agv能够再次将其自身从机器的激光扫描仪的检测范围中移开。但是,一方面,这需要机器中的相应的机械装置,并且另一方面,延长了生产时间,因为机器在转载期间必须静止。同样地,根据机械实施方案,在此也必须确保:没有人类与agv一起进入机器,但与agv相反而没有再次离开。
技术实现要素:
13.在此背景下,本发明的目的是:为在工业自动化设施的部件之间分布的自动化任务提供改进的安全监控。目的通过独立权利要求的特征来实现。在从属权利要求中说明有利的设计方案。
14.本发明涉及一种用于在工业自动化设施中调整故障安全的监控的方法,其中,借助于工业自动化设施的移动部件的传感器以故障安全的方式得出移动部件相对工业自动化设施的其他部件的姿态,其中,在移动部件与其他部件之间构建通信和故障安全的耦合连接,并且其中,在成功耦合连接的情况下,调整移动部件的监控区域。
15.在本技术中,将术语故障安全理解为遵守如下规定,针对功能安全的系统、尤其集成制造系统给出该规定。对功能安全的这种要求例如在工业环境中通过对安全相关的电气的、电子的、可编程的电子系统的标准系列en 61508的规定来限定。在此,已知不同的机制、即例如冗余数据处理来遵守在功能安全方面的要求。din en iso 11161“机器安全集成制造系统基本要求”包含对机器的安全相关连接重要的安全方面。术语故障安全和安全导向被同义地使用。
16.设施内的移动部件、特别是agv或amr能够借助于所描述的方法与其他部件、尤其其他移动部件或静态部件一起解决自动化任务,例如加工工件,使得满足对故障安全的要求进而例如符合标准地确保对停留在设施中、例如工厂或车间中的人类的保护。
17.通过例如经由工业wlan或替代地经由其他无线或有线通信连接来进行通信和故障安全耦合连接的方式,将移动部件和其他部件尤其作为集成的制造系统彼此连接。作为这种耦合连接的前提,故障安全地确定移动部件相对于其他部件的姿态。为此,例如无错地得出关于移动部件相对于其他部件或相对于参考部件或参考标记的姿态的信息。
18.当前,将术语姿态理解为涉及位置和定向的信息。故障安全的得出移动部件的姿态确保:移动部件以足够的安全性知道如何评估其相对于其他部件的位置和定向。例如,姿态直接相对于其他部件来确定,或者间接地借助于参考值来确定。例如,移动部件绝对地或
相对于其他部件或参考部件得出自身位置。根据移动部件的自由度,位置确定足以确定三维空间中的姿态。例如,移动部件绝对地或相对于其他部件或参考部件得出自身定向。特别优选地,移动部件根据可预设的和/或预设的信息确定姿态,该信息提供关于移动部件与其他部件之间的关系。优选地利用可预设的准确度确定移动部件的姿态。
19.因此能够保证:能够调整、例如扩展或减小或改变移动部件的监控区域,而在此没有产生在监控中出现间隙的风险,例如在间隙中人会被参与的部件之一伤害到。特别地,除了要由移动部件基于其监控的安全区域之外,要基于另一部件监控的安全区有利地至少部分地通过移动部件监控。
20.因此,特别地,实现了对移动部件的也可称作为保护空间的监控区域的安全且限定的改变、特别是扩展。这例如允许移动机器人上的夹持臂的运行,因为位置是固定的。此外,例如,允许其他部件与agv交互,因为agv接管了对其他部件的危险位置的保护。
21.成功的通信和故障安全的耦合连接导致安全信息能够在移动部件与其他部件之间共享。属于共享安全信息的例如是:移动部件借助其自身的安全传感机构对其他部件由于移动部件而无法监控的区域监控,例如因为该区域被agv覆盖。同样属于共享安全信息的能够是:移动部件的传感器接管其他部件的传感器的任务。这还能够包括安全传感机构的情况切换。
22.安全信息的共享还能够包括与其他部件相关的安全功能,例如通过移动部件触发的其他部件的多轴机器人的停止过程的启动。因此,例如移动部件的传感器能够识别到对调整的安全区域的侵犯,并且在其他部件的驱动器中引起安全功能。
23.例如,agv中的紧急停止开关作用于装载agv的其他部件的机器人。
24.在工业中的功能安全系统的环境中,危险程度进而对硬件和软件的要求以性能等级(pl)来说明。相应的要遵守的安全等级在根据iec61508/iec61511的国际标准中,也称作为安全等级或安全完整性等级,或英文安全完整性等级(safety integrity level),简称sil。为了保证维持例如在机器人臂中要求的、安全功能的性能等级d(pld),在与其他部件成功耦合连接的情况下才调整移动部件的监控区域,并且对此的前提又是其他移动部件的位置和定向的安全导向地识别。
25.因此,能够确保从移动部件传输安全导向的信号以及其在其他部件中的处理至少在pld上进行。因此,故障安全信号能够在耦合连接状态下跨系统使用。
26.这为设施操作员实现在生产中将移动部件(例如agv)结合其他部件(例如静态的机器人)一起不一致地使用。因此显着增加在生产运行中灵活使用机器的可行性,从而提高整个设施的生产率。
27.根据一个设计方案,还调整其他部件的监控区域。然后,成功的耦合连接例如具有如下作用:也将其他部件的监控区域匹配于与移动部件耦合连接的状态。由此,从其他部件的角度来看,能够考虑由于与移动部件的交互而新形成的改变的危险源。例如,由于移动部件而不再能够由其他部件的安全传感机构访问的区域不再由该安全传感机构监测,而是由移动部件的安全传感机构监测。其他部件的先前的监控区域例如由于移动部件的扩展而不再必须被监控,因为移动部件本身在空间上不覆盖这些区域。
28.根据一个设计方案,侵犯移动部件的调整的监控区域引起:采用安全功能,特别是移动部件和/或其他部件的安全功能。例如,调整的监控区域例如能够由多个场区组成,场
区通过移动部件的安全传感机构来监控。对于侵犯各种场区能够预设不同的安全功能。在此,例如,对于不同的场区设有不同的安全功能,安全功能在移动部件的驱动器处起不同的作用或者在移动部件的不同的驱动器处起作用,和/或对于不同的安全功能设有不同的场区,安全功能一方面又作用于移动部件的驱动器,并且另一方面作用于其他部件的驱动器。
29.根据一个设计方案,侵犯其他部件的调整的监控区域引起:采用安全功能,特别是移动部件和/或其他部件的安全功能。通过成功耦合连接,有利地,安全信息、例如关于侵犯其他部件的监控区域的信息在移动部件处可用,或者在移动部件处、尤其在其驱动器处采用或实施从该信息中可导出的安全功能,其中,该监控区域尤其同样被调整。
30.由此,有利地实现了在两个方向上移动设备部件与其他部件之间的安全信息共享和故障安全信号的跨系统使用。
31.根据一个设计方案,移动部件的监控区域根据其他部件的激活直至耦合连接的安全区域或根据其他部件的由于耦合连接而需要的安全区域来调整。
32.其他部件例如能够配设自身的安全传感机构,该安全传感机构本身设计用于监控可预设的场区。该场区直至耦合连接都被作为监控区域来监控。属于此的例如在固定的其他部件、例如在具有机器人或操纵器的加工站的情况下环形围绕加工站的场区。在调整通过移动部件的监控时考虑之前监控的场区。
33.在同样移动的其他部件的情况下,监控区域在耦合连接之前例如能够由在行进方向上加宽的场区构成,对于该场区根据距移动部件的间距采用不同的功能,尤其警告信号输出或减速。
34.同样地,对处于静止中的移动的其他部件能够设有具有相关联的安全功能(例如停住安装在其他部件上的机器人或将其与电源分离)的不同场区。在耦合连接两个移动部件之后,在调整通过移动的、尤其相应的其他移动的部件的监控时也考虑之前监控的场区。特别地,通过考虑新的危险情况调整两个监控区域。调整的监控区域根据应用或情况来设计。例如,通过以下方式调整未耦合连接的、处于静止的部件的圆形的监控区域:即该部件对于调整的监控区域预设待监控的区域的外包络线。调整的监控区域例如考虑由于耦合连接新产生的危险以及由于耦合连接而不需要或不再需要的监控。
35.此外,能够由移动部件的安全传感机构监控由于耦合连接而变得必要的安全区域,该安全区域由于其他部件的功能和与其耦合连接而对于耦合连接的系统整体存在。例如,在耦合连接之后由移动部件通过所需的安全区域监控的监控区域部分之前没有被其他部件监控,特别是因为其不具有自身的安全传感机构。因此,在耦合连接状态下,监控之前不必监控的区域,例如因为其他部件的机器人只能够在耦合连接状态下移动。
36.根据一个设计方案,移动部件的监控区域通过以下方式来调整:即之前由其他部件的监控区域所监控的区域由于耦合连接而通过移动部段的监控区域来监控。例如,监控区域的部分、特别是各个场区能够在耦合连接之后通过移动部件接管。例如,切换监控情况,使得移动部件的安全传感机构部分地直至完全地接管其他部件的监控区域。同样地,尽管还存在耦合连接,区域仍可不变地通过其他部件监控。例如,不必接管其他部件的整个监控区域,而是仅接管在耦合连接状态中的移动部件周围的区域。
37.根据一个设计方案,移动部件的监控区域通过以下方式来调整:即至少对于监控区域的一定份额、尤其对于与直至耦合连接都由其他部件的监控区域监控的场区重叠的区
域进行调整、尤其补充或切换监控模式、尤其安全功能。例如,因此,除了在场区、即监控区域的空间扩展方面调整监控区域之外,也能够调整利用其来采用安全功能的逻辑。例如,在成功耦合连接后对于移动部件的监控区域、尤其被监控的场区在侵犯的情况下触发两种安全功能,一方面是对于其他部件的驱动器、尤其安装在其上的抓取机器人的驱动器的安全限速状态,简称sls,并且另一方面是对于安装在移动部件上的抓取机器人的所谓的安全扭矩关闭,简称sto。在这种情况下,其他的、例如固定的部件的机器人减速,并且移动部件的机器人与电源分离。
38.根据一个设计方案,其他部件的监控区域通过以下方式来调整:即根据移动部件的位置从通过其他部件的监控中取出区域。这例如能够实现:移动部件本身不被识别为危险物体并且尤其移动部件或安置在移动部件上的机器人能够停留或移动到其他部件之前或在其他部件中停留或移动,而通过其他部件的监控不采用安全功能,例如继续或持久地报告侵犯并且尤其然后停止或采用其他安全措施。
39.根据一个设计方案,其他部件的监控区域通过以下方式来调整:即停用在移动部件与其他部件之间的安全装置。尤其在构造为固定的加工站的其他部件的情况下通常设有安全装置,例如激光光栅或光幕或其他光学装置,以防止通过人类的干预或进入。在耦合连接成功的情况下,这种安全装置被停用,并且同时耦合连接的整个系统被监控,使得通过调整移动部件的监控区域和优选还有调整其他部件中的监控区域来补偿监控中的间隙,间隙通过停用的安全装置而形成。在例如构造为具有机械的安全装置(如玻璃片)的移动加工站的移动部件的情况下,例如仅停用光栅的子区域,在该子区域中静态部件的安全装置与移动部件叠加。因此,移动部件的机器人能够与其他部件交互作用,并且特别是进入否则由光栅保护的其他部件的区域中,而没有触发光栅和尤其其他部件的机器人臂的紧急停止。这根据标准是允许的,因为所述的移动部件本身通过机械构件(如其基底、型材和玻璃片)阻挡相关的区域。
40.根据一个设计方案,借助于轮廓识别法来确定姿态。有利地,能够借助于如下轮廓识别法实现可靠地确定移动部件相对于其他部件的位置和定向,在轮廓识别法中例如在地面以上特定高度上记录环境。例如,移动部件的故障安全的构造的激光扫描仪用于故障安全地实施轮廓识别。例如,能够为移动部件预设特定的轮廓,在识别出该轮廓的情况下,移动部件能够对其相对于其他部件的自身的位置和定向进行分类。通常,能够在移动部件的激光扫描仪处施加多种轮廓。
41.根据一个设计方案,对于轮廓识别法识别其他部件的轮廓。
42.例如,待识别的轮廓安置在表面上,这被称为对存在的表面的正应用。同样地,轮廓能够加工到表面中,从而轮廓被更好地保护免受机械影响。然后,这被称为对表面的负应用。在此,降低了待识别的轮廓与设施中的人类或机器碰撞的风险,使得轮廓不会无意中被损坏或变形,从而无法识别。
43.在移动部件中创建多个轮廓的情况下,能够将多个设有相应轮廓的其他部件进行耦合连接。安全导向的轮廓的使用能够实现故障安全的耦合连接进而最终实现符合当前标准。
44.根据一个设计方案,在确定移动部件的姿态时、在构建通信和故障安全的耦合连接时和在调整监控区域时使用统一的安全等级,尤其认证过的安全等级。特别地,安全等级
通过安装在部件上的机器人的危险和通过与设施中的人类用户的交互作用可行性的程度来确定。因此,要使用的安全等级基于新出现的危险情况。
45.根据一个设计方案,即使在由于侵犯调整的监控区域而采用安全状态的情况下,也使用统一的安全等级。因此,有利地确保:连续地从信号检测直至输出安全措施都满足所要求的安全等级。
46.根据一个设计方案,动态地构建和终止在移动部件与其他部件之间的通信和故障安全的耦合连接。
47.为了构建通信和故障安全的耦合连接,例如构建无线但仍故障安全的通信,例如经由wlan。此外,有线的通信连接也是可行的。例如,移动部件能够作为构建的通信的参与者动态地在通信伙伴中登陆和再次注销。因此,移动部件能够在执行总任务时有利地与各种机器建立联系。替代地,中央故障安全的控制器能够与多个移动部件之一建立通信,然后,移动部件与恰好其要与之共同作用的其他部件建立临时的故障安全的通信。
48.本发明还涉及一种工业自动化设施的移动部件的安全单元,其包括:到用于故障安全地确定移动部件相对于其他部件的姿态的传感器的接口;耦合接口,耦合接口用于在移动部件与其他部件之间构建通信和故障安全的耦合连接;监控单元,监控单元用于在成功耦合连接的情况下调整移动部件的监控区域。
49.传感器能够理解为以故障安全方式构造的移动部件的安全装置的一部分。所使用的传感器的工作方式或传感器原理优选地匹配于应用。根据应用,有利也能够使用3d传感器。
50.监控单元构造为控制器的一部分,特别是故障安全的控制器的一部分,或者构造为移动部件的控制器。因此,在一个设计方案中,安全系统能够构成在控制器上,或者换言之,移动部件的控制器、特别是plc能够是安全控制器。
51.根据一个设计方案,安全单元还包括信号输出单元,信号输出单元用于在侵犯调整的监控区域的情况下采用安全状态、特别是移动部件和/或其他部件的安全状态
52.本发明还涉及一种安全系统,安全系统具有上述设计方案的安全单元,其中,安全系统还包括至少一个传感器、特别是至少一个2d传感器、3d传感器或激光扫描仪。
53.根据一个设计方案,其他部件是其他移动部件。移动部件以及其他移动部件在此能够是agv或amr。通常,可将移动部件理解为具有所描述的安全系统的生产设施的所有移动单元以及可动态添加或移除的结构。
54.根据一个设计方案,其他部件是静态部件。在此,静态部件能够配备自身的安全单元。例如,静态部件配备自身的安全传感机构,或者在静态部件中设有安全控制器形式的安全装置。安全控制器以安全导向的方式驱控例如机器或机器人或静态部件中或静态部件处的通常可控制的可移动的部分,并且将它们例如保持在停止位置中,直至成功构建与移动部件的耦合连接。例如,静态部件不具有安全传感机构,并且也不具有与相应传感机构的接口。
55.本发明还涉及一种用于在工业自动化设施中调整故障安全的监控的方法,其中,通过工业自动化设施的移动部件与工业自动化设施的其他部件的通信和故障安全的耦合连接调整移动部件的监控区域,使得至少部分地借助于移动部件监控基于其他部件监控的安全区域。
56.根据一个设计方案,基于以故障安全的方式确定移动部件相对于其他部件的姿态来执行通信和故障安全的耦合连接。
附图说明
57.下面,借助于附图根据实施例更详细地解释本发明。附图示出:
58.图1示出根据现有技术的具有安全传感机构的agv的示意图;
59.图2示出根据现有技术的具有安全传感机构的固定加工站的示意图;
60.图3示出根据本发明的第一实施例的由移动部件和其他部件构成的系统的示意图;
61.图4示出根据本发明的第一实施例的用于轮廓识别的计算机程序的可视化的示意图;
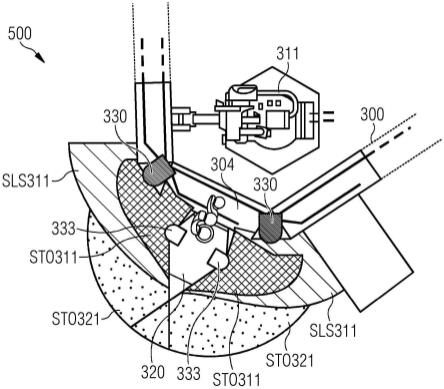
62.图5示出根据本发明的第一实施例的调整的监控的示意图;
63.图6示出根据本发明的第二实施例的其他部件的示意图;
64.图7示出根据本发明的第二实施例的调整的监控的示意图;
65.图8示出根据现有技术的在导航期间的移动部件的监控区域的示意图;
66.图9示出根据本发明的第三实施例的移动部件和其他移动部件的示意图;
67.图10示出移动部件的示意立体图;
68.图11示出根据本发明的第三实施例的调整的监控的示意图;
69.图12示出根据所提到的实施例中的任一实施例的移动部件的安全系统的示意图。
70.在附图中,除非另有说明,相同功能的元件设有相同的附图标记。
具体实施方式
71.根据图3解释本发明的第一实施例,图3示意性地示出柔性的制造系统300的部分,其中,模块320、321动态地对接和解除对接。在此,机器人臂311静态地安装在围绕其的六边形的中心。各个生产模块320、321例如能够对接在六边形的六个侧面中的五个侧面处。示例性地示出了这五个侧面中的三个侧面。第六侧面配设运输带并且不提供耦联的可行性(未示出)。
72.模块例如是agv 320或移动的、特别是可位移的、具有自身的安全传感机构的加工站321。在下文中,更详细地观察在作为移动部件的agv320与作为其他部件的静态制造站300之间的交互。
73.在模块能够对接的静态制造站300的侧面处应当能够进行机器人臂311与模块之间的交互,并且尤其位于agv 320上的操纵器321能够进入六边形中,例如以引入用于机器人臂311的工具或制造部件或者用于从六边形内的传送带提取工件载体。
74.静态制造站300在六边形的角中配备有安全激光扫描仪330并且沿侧面配备有光栅331(仅在一侧上作为示例示出)。安全激光扫描仪330能够实现如下功能:即在侵犯激光扫描仪330的监控区域340时,机器人臂311以降低的速度工作,即采用安全导向的降低的速度或安全限速(简称sls)的功能。当agv 320至少部分地处于监控区域340中时,才侵犯监控区域340。
75.光栅331确保:在侵犯光栅的情况下,采用机器人臂的安全导向的、受监控的停住,
即采用安全扭矩关闭功能,简称sto。
76.如果agv 320现在沿着移动路径350接近静态制造站300,则机械臂311减速,因为agv 320以其外包络线侵犯激光扫描仪330的监控区域340。
77.在agv 320在一侧到达对接部304之后,必须以安全导向的方式确定agv 320的姿态,因此能够实现与静态制造站300的耦合连接。移动机器人的姿态的安全导向的确定通过agv 320的激光扫描仪333的安全功能“安全导向的轮廓识别”来进行。在六边形的存在对于故障安全识别的需求的每个位置处,设有轮廓360、361,该轮廓独特地设计,以便通过激光扫描仪仅识别相应的轮廓360、361并排除混淆。像标准的监控区域或安全场区,在激光扫描仪的配置中静态地设置轮廓,并且然后能够以二进制形式进行评估和逻辑处理。特别地,为此轮廓360可作为模板提供给agv 320的激光扫描仪333,并且将借助于激光扫描仪333扫描的周围环境与存储的轮廓360进行比较。
78.在此,当amr改变其位置和定向时,通过激光扫描仪检测的轮廓相对于amr位移。因此,在识别到并且根据存储的模板验证的轮廓的情况下,确保匹配的姿态。换言之,仅存在一个amr相对于产生匹配的轮廓的有效姿态。
79.在图4中示出计算机程序“sick安全设计器(sick safety designer)”的屏幕截图410,当接近静态制造站300时,轮廓360处于扫描的左侧。
80.借助于根据pld利用激光扫描仪333对轮廓360的安全相关导向的识别,能够以故障安全的方式实现传感机构到耦合连接系统的情况的情况切换。在此,所有参与的传感器均符合通过危险得到的且由此预设的安全等级pld。
81.当agv达到预期的姿态时,其中,已经由激光扫描仪识别到先前存储的轮廓并且激光扫描仪输出用于验证姿态的二进制信号,采用agv 320和静态制造站300之间的耦合连接。如上所描述的那样,为此也使用根据pld的安全导向的方法。在所述示例中,轮廓固定地安装在静态的机器处。因此,也能够考虑经由相对于静态部件的位置或经由其在世界中的位置将自身的位置和/或定向换算为世界坐标系。该计算也能够在f-plc中进行,进而故障安全地实现。
82.在成功耦合连接后,agv 320和静态制造站300是故障安全的整体系统500。静态制造站300的激光扫描仪330于是切换监控情况并且不再将agv 320识别为干扰对象,从而不再识别和报告侵犯监控区340。静态制造站300的监控区域被调整为,使得切换负责agv的面的激光扫描仪330,使得激光扫描仪不再监控现在处于静止的模块的面。
83.agv 320的激光扫描仪333也切换监控情况并评估影响agv 320的操纵器321和六边形中的机器人臂311的场区。
84.图5以图形方式示出在成功耦合连接之后的调整的监控区域、安全区域和光栅。对于所有所示出的监控区域适用的是:其在此为逻辑存储的区域或场区。特别地,通过附图中示意地示出监控区域和安全场区不能表达真实进行的可视化和模拟。然而,能够有利地使用在工程程序中的示意图或模拟程序中的模拟,以对监控区域及其调整进行编程。
85.作为划线区域绘出的调整的监控区域sls311始于位置固定的设施300的激光扫描仪330,并且被侵犯的情况下引起六边形中的机器人臂311的安全速度。方格绘制的调整的监控区域st0311由agv 320的激光扫描仪333评估,并导致机器人臂311的安全停止。需要该监控区域,因为否则人类会通过“静音”,即穿过光栅的释放的区域,而在此不触发机器人臂
311的安全停止。例如,在六边形的对接部304的侧面处,仅在内部区域中停用光栅,操纵器321由于几何尺寸而能够到达该内部区域中的。调整的监控区域sto321导致操纵器321在ag v320上的不受控的停止。
86.第一实施例示出agv 320的定向的正确的和故障安全的识别的相关性。如果相关性识别为假,并且agv 320例如相对于静态设施300与固定在其处的轮廓360转动几度,则会在监控的场区中出现间隙,在该间隙中人类会接近设施,而不被检测到。此外,在根据错误定向,在轮廓识别错误的情况下,当静态设施侵犯调整的监控区域sto311和sto321时,调整的监控区域会被触发,从而或者关闭六边形中的机器人臂311和agv上的操纵器321。
87.有利地,能够利用根据第一实施例规划的技术保护措施成功地完成用于评估风险和降低风险的、来自din en iso 12100的三阶段迭代过程。
88.根据第二实施例描述来自汽车行业中的应用示例。例如,汽车制造商专注于:在工厂中通过agv车队取代传统装配线。因此,各个制造单元同样不再必须顺序地布置,而是能够一定程度自由地安置在车间中,其中,该安置在组装汽车时满足如之前那样存在的相关性和顺序。
89.在这种场景中,根据相关车辆的具体配置,agv运输汽车车身并将其从一个制造单元带到下一制造单元。在图6中示例性示出这种制造单元600,其中,在实际的设计方案中在工厂中设有多个制造单元。由agv一定程度驶过制造单元600,其中,agv停在中间,因此单元能够执行其生产步骤。图7示出其中agv 620位于制造单元600中的情况。在此,特别地,agv停顿并且不相对于制造单元600移动。出于概览的原因,agv 620的表示也限于一个,其中设有多个agv,特别是比制造单元更多的agv。
90.如图6所示,如果在制造单元600中没有具有车身的agv,则所有移动部件、即例如机器人611、612都处于安全状态,特别是处于sto中。为此,例如,设有用于操控机器人驱动器的安全导向的控制器。
91.agv 620具有相应的传感机构,以便agv能够在人类也停留其中的车间中在制造单元之间绕行。因此,agv 620能够独立监控其在驶入制造单元600中时不危害人类。一旦agv 620处于制造单元600中并且借助于激光扫描仪执行安全相关的位置和定向识别,agv就建立到制造单元600的安全通信连接。agv 620使用在前侧和后侧处的为导航而存在的激光扫描仪630。
92.一旦人类接近制造单元600进而接近危险区域,其就被agv 620的激光扫描仪630识别。经由故障安全的通信连接为制造单元600的故障安全的控制器报告在调整的监控区域sls600中的人类移动,然后,控制器根据sls功能将所有执行器降低到安全速度。特别地,agv 620为前侧和后侧提供单独的报告,使得单元控制器能够仅减慢直接相关的执行器,而代替必须停止整个单元。如果人靠近制造单元600并且在调整的监控区域st0600中被识别到,则所有机器人611、612根据sto被关闭。
93.根据第二实施例,制造单元600和agv 620在其尺寸方面有利地彼此协调,使得只有制造单元600的访问区域必须受到保护,并且刚好能够通过agv 620的传感机构来监控访问区域。根据应用和规划,除了用于导航通过设施的那些场区之外的其他场区被用作为通过agv 620监控的调整监控区域sls600、sto600。
94.根据图8说明处于行驶模式中的agv 820的导航监控场区会看起来如何。示出三个
依次相邻的场区sls871、sls872、st0873,在物体进入相应区域中时,场区以交错方式触发三个不同的安全功能,特别是分别触发采用如下安全功能,即采用在具有两种不同的预设的、尤其配置过的目标速度的sls871和sls872中的安全导向的速度,以及采用st0873中的sto。因此,能够实现agv 820越接近物体或者物体越接近agv 820,agv 820就在行进方向上移动得越来越慢,并且最终关闭。
95.在将图7中的调整的监控区域与图8中的导航监控区域进行比较时,变得显而易见的是:监控区域的几何形状、特别是从总体可监控的场区的集合中选择要监控的场区,以及各调整的监控区域存储的安全功能彼此偏差。出于性能原因,监控场区的评估通常在具有几个(例如八个)场区的监控情况下进行总结。
96.在传统工厂中,每个制造单元都必须配备自己的安全导向的传感机构,以符合现行标准。作为根据本发明的第二实施例的其他静态部件的制造单元600在没有自己的昂贵的安全导向的传感机构的情况下足以胜任,使得对于汽车制造商来说产生巨大的节省潜力。在此,整个设施的安全水平有利地不降低。所述示例用于说明,并且能够转移到其他制造行业的示例。
97.根据本发明的第三实施例,设有两个amr的耦合连接。图9示意性地示出了在开放的面上移动的amr、amr 920和另一amr 900。例如,两个amr共同执行接合过程或彼此交换材料或工具。为了说明,图10示出这种amr的侧视立体图。
98.为此,amr 920、900分别都在其平台上安装操纵器921、901,并且总是仅当确保人类保持距相应的操纵器以及距相应的amr足够的间距时才操纵器才允许移动。由于amr 900通过其安全传感机构而至少首先无法在人类、机器人与物体之间进行区分,所以在此借助例如安置在amr900处的轮廓的故障安全的识别来进行工作。在通过amr920故障安全地识别amr 900处的轮廓后,amr 920能够确定其是期望的amr 900,例如柔性生产设施中的相邻的amr 900或设置在柔性的生产工艺中的供应的amr。
99.至此,能够有利地激活amr 900、920的安全情况,他们将安全情况用于其在设施中的导航。例如,两个amr 900、920在行驶中如根据图8以针对没有操纵器的agv描述的那样评估场区。在识别到物体或人类在场区内移动的情况下,对于amr的驱动器预设降低的速度或sto。
100.在通过amr 920故障安全地识别amr 900之后,或反之亦然,为此amr应彼此足够靠近,能够采用耦合连接并且切换传感机构的监控情况。图11示出amr 900、920作为具有共同的调整的监控区域sto11、sls111的耦合连接的、故障安全的整体系统100,在该监控区域中amr 900、920能够执行其任务。在此,一个amr的安全传感器补偿通过其从另一amr角度被遮区域,这是由于另一arm而需要的,反之亦然。
101.由调整的监控区域形成的保护区又由各个场区组成,场区在其几何形状方面由于传感机构而得出。根据安装的传感器的数量和由此由于amr的相应的安全单元而可监控的场区的数量,如在图11中示出的那样得到圆形的调整的监控区域,或者得到如图5的实施例中说明的更复杂的几何形状。图11中所示的圆形的监控区域尤其能够利用多个、安置在amr的相应的外边缘处的传感器来实现。
102.特别地,不极性为各amr单独设置的监控区域的单纯的叠加,而是针对整体通过耦合连接的amr得到的危险情况设计共同的、调整的监控区域,并且考虑由于耦合连接而新出
现的危险和由于耦合连接而不需要或不再需要的监控,例如在amr之间或在amr内。
103.针对两个amr在监控面的扩展或设计方案方面和优选也在对各监控的和侵犯的监控区域的要采用的安全功能方面进行调整。
104.共同的内部的调整的监控区域sto111例如引起力矩释放或安全扭矩关闭功能等。例如,sto设置为在静止状态中和在成功耦合连接之后的监控区域sto111的安全功能,因为然后操纵器能够在amr上移动。例如,外部调整的监控区域sls111例如具有对一个或两个操纵器901、921的安全速度监控,当识别到物体时,采用速度监控作为安全功能。在操纵器901、921技术上不被设计用于支持安全速度监控的变体方案中,调整的监控区域也能够实现为具有警告功能,警告功能引起输出警报信号。
105.根据第三实施例的方法不限于两个参与的amr,而是还能够利用两个以上的单元使用,使得多个amr能够共同处理复杂的任务。
106.图12示出能够任意地在上述实施方式的移动部件中使用的安全系统200。该安全系统具有安全单元150,例如故障安全plc,安全单元具有到传感器161、162的接口160,用于故障安全地确定移动部件相对于其他部件的姿态。此外,设有耦合接口170,其用于借助于wlan通信组件190在移动部件与其他部件之间构件通信的和故障安全的耦合连接。能够考虑在上述实施例中描述的其他部件中的任意部件。耦合接口170和用于驱控其他故障安全部件的接口、特别是到传感器的接口160和到移动部件的驱动器的接口有利地实现为共同的接口。在此,也能够使用并行接口,并行接口例如支持基于有线的和基于通信的连接。
107.还设有用于在成功耦合连接的情况下调整移动部件的监控区域的监控单元180。安全单元150例如是具有所提到的集成接口和监控单元的故障安全的控制器。
108.以故障安全方式得出的、实施安全功能的控制信号例如在通信方面以故障安全方式或经由相应的i/o模块输出至不同的故障安全的驱动器163、164。
109.具有计算机程序的计算机程序产品能够在安全单元150、特别是故障安全控制器上执行,计算机程序产品具有用于执行根据上述设计方案之一的方法的构件。特别地,为此,监控单元的逻辑区域与控制器的其他逻辑区域协作。
110.尽管详细地通过优选的实施例详细地阐述和描述本发明,然而本发明不受所公开的示例限制,并且本领域技术人员能够在不脱离本发明的保护范围的情况下从中推导出其他的变体方案。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1