一种应用于复杂电磁环境下的配电网无人机自主巡线方法与流程
1.本发明涉及电网无人机检测的技术领域,具体涉及一种应用于复杂电磁环境下的配电网无人机自主巡线方法。
背景技术:
2.输、变、配电力环境属于复杂电磁环境,常常运用无人机进行巡检。配电网无人机自主巡线则是指面向输、变、配电力巡线不同业务场景,以无人机智能基站为载体,以地理空间智能算法为核心,集成多功能传感器等,开展输配变一体化智能巡线检查,提供从数据获取、数据处理、数据分析到成果应用的无人化电力巡线方案。
3.现在已经开发出了很多无人机自主巡线方法,经过我们大量的检索与参考,发现现有技术的无人机自主巡线方法有如公开号为cn108829130a、cn106025930a、ep3371619b1、us20210009266a1、jp2018112485a所公开的无人机自主巡线方法,这些无人机自主巡线方法一般包括:无人机、数据采集组件和控制器;数据采集组件用于采集飞行有关数据传至控制器,控制器包括无人机驱动节点和巡线飞行控制节点;控制器接收无人机的视频图像数据,由其中的无人机驱动节点处理后发送到巡线飞行控制节点,巡线飞行控制节点对视频图像信息进行处理并识别轨迹,再检测轨迹误差,经pi控制后得到左右线速度和偏转角速度,再加上向前线速度发送到无人机驱动节点,再由无人机驱动节点处理后发送到无人机,使无人机巡线飞行。该方法利用前述系统进行巡线飞行,由于飞行误差进行pi控制,无人机飞行轨迹接近于预设轨迹,能良好的自主跟随预设轨迹进行飞行,实现无人机的巡线飞行。由于上述方法和系统应用于大型输、变、配电力环境时,无人机的巡线任务难度增加,飞行距离较长,使得巡线方法和系统对无人机的控制和维护变得更加复杂,而上述方法和系统的控制较为单一而且缺少维护无人机的流程,造成了无人机巡线效率降低的缺陷。
技术实现要素:
4.本发明的目的在于,针对上述无人机自主巡线方法存在的不足,提出一种应用于复杂电磁环境下的配电网无人机自主巡线方法。
5.本发明采用如下技术方案:
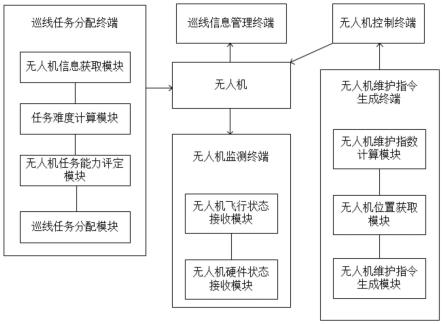
6.一种应用于复杂电磁环境下的配电网无人机自主巡线系统,其特征在于,包括巡线任务分配终端、无人机控制终端、无人机监测终端、巡线信息管理终端和无人机维护指令生成终端;
7.所述巡线任务分配终端用于将不同的巡线任务分配至无人机主仓库内不同的无人机;所述无人机控制终端用于根据巡线任务控制对应的无人机完成飞行任务;所述无人机监测终端用于实时监测全部无人机的飞行状态和硬件状态;所述巡线信息管理终端用于接收不同无人机进行巡线任务时的各种巡线信息,对巡线信息进行分析和管理;所述无人机维护终端用于根据无人机的飞行状态和硬件状态生成对应无人机的维护指令;
8.所述无人机控制终端还用于根据维护指令控制不同的无人机到主仓库或沿途维护站进行停机维护。
9.可选的,所述无人机监测终端包括无人机飞行状态接收模块和无人机硬件状态接收模块;所述无人机飞行状态接收模块用于接收全部无人机的飞行状态信息;所述无人机硬件状态接收模块用于接收全部无人机的硬件状态信息。
10.可选的,所述巡线任务分配终端包括无人机信息获取模块、任务难度计算模块、无人机任务能力评定模块和巡线任务分配模块;所述无人机信息获取模块用于获取待分配任务的无人机的机体信息;所述任务难度计算模块用于计算各类型巡线任务的难度等级;所述无人机任务能力评定模块用于根据无人机的机体信息为对应的无人机评定任务能力;所述巡线任务分配模块用于根据巡线任务的难度等级和无人机的任务能力进行巡线任务分配;
11.当所述任务难度计算模块计算时,满足以下式子:
[0012][0013][0014]
其中,r1表示任务难度指数;q1表示任务涉及的飞行距离;q2表示任务地点的海拔高度;q3表示任务地点的电线输电电压;q4表示任务地点的电线处磁场大小值;p表示预设的任务地点环境等级;w表示任务难度等级;μ1和μ2分别表示第一阈值和第二阈值,均由工程师根据经验设定;k1至k4表示指数转换系数,均由工程师根据经验设定;
[0015]
当所述无人机任务能力评定模块工作时,满足以下式子:
[0016][0017][0018][0019][0020]
其中,r2表示无人机任务能力指数;e
now
表示无人机的机体年龄;e
ref
表示标准机体年龄;m表示无人机的维护总次数;f1(o)表示基于无人机电池年龄的指数选择函数;o表示无人机的电池年龄;max表示最大指数值,由工程师根据经验设定;f2(t)表示基于前一次维
护的间隔年数的符号确认函数;t表示无人机当天到前一次维护的间隔年数;u表示指数变换基准值,由工程师根据经验设定。和表示权重型指数转化系数,由工程师根据经验设置;y表示基于无人机任务能力指数的无人机任务能力;η1和η2表示定级阈值,均由工程师根据经验设定;所述巡线任务分配模块分配巡线任务时,将确认等级后的巡线任务分配至具有相同等级的任务能力的无人机。
[0021]
可选的,所述无人机维护指令生成终端包括无人机维护指数计算模块、无人机位置获取模块和无人机维护指令生成模块;所述无人机维护指数计算模块用于计算对应无人机的维护指数;所述无人机位置获取模块用于实时获取无人机的位置信息;所述无人机维护指令生成模块用于根据无人机的维护指数和位置信息生成对应的维护指令并发送至无人机控制终端;
[0022]
当所述无人机维护指数计算模块计算时,满足以下式子:
[0023][0024][0025][0026]
其中,z表示无人机的维护指数;f4(f&g)表示基于飞行状态和硬件状态的权重选择函数;f表示飞行状态;g表示硬件状态;f=0表示飞行状态正常;f=1表示飞行状态异常;g=0表示硬件状态正常;g=1表示硬件状态异常;a
max
表示最大权重系数,由工程师根据经验设定;f3(d)表示基于无人机电池电量的系数选择函数;d表
[0027]
′
[0028]
示无人机电池电量;d表示对比参考值,由工程师根据经验设定;t表示无人机的维护间隔年数参考值,由工程师根据实际情况设定;λ2表示维护间隔比例的权重系数,由工程师根据经验设定;λ1表示电量对比值的最小权重系数;λ
max
表示电量对比值的最大权重系数;λ1和λ
max
均由工程师根据经验设定;当z≥δ时,表示无人机需要进行维护,所述无人机维护指令生成模块根据无人机的位置信息为需要进行维护的无人机选择对应的维护地点;δ由工程师根据经验预先设定;当f4(f&g)=a
max
时,z≥δ;当f3(d)=λ
max
时,z≥δ。
[0029]
可选的,所述任务难度计算模块包括任务地点环境等级计算子模块和任务难度计算子模块;所述任务地点环境等级计算子模块用于根据任务地点的天气因素和环境因素计算任务地点环境等级;所述任务难度计算子模块用于根据任务地点环境等级计算各类型巡线任务的难度等级;
[0030]
当所述任务地点环境等级计算子模块计算时,满足以下式子:
[0031]
[0032][0033]
其中,c表示任务地点环境等级选择评分;xi表示执行任务当天的天气预报中第i种非晴天天气的预报持续小时数;非晴天天气是指天气预报中除了晴天以外的各种天气类型;i表示非晴天天气的种类数;l1表示电线下方树林沿电线延伸方向的占地跨度距离;l2表示对应树林占地跨度距离上方电线的电线长度;β1和β2表示任务地点环境等级划分阈值,均由工程师根据经验设定。
[0034]
一种应用于复杂电磁环境下的配电网无人机自主巡线方法,应用于如上述的一种应用于复杂电磁环境下的配电网无人机自主巡线系统,所述巡线方法包括:
[0035]
s1,将不同的巡线任务分配至无人机主仓库内不同的无人机;
[0036]
s2,根据巡线任务控制对应的无人机完成飞行任务;
[0037]
s3,实时监测全部无人机的飞行状态和硬件状态;
[0038]
s4,接收不同无人机进行巡线任务时的各种巡线信息,对巡线信息进行分析和管理;
[0039]
s5,根据无人机的飞行状态和硬件状态生成对应无人机的维护指令;
[0040]
s6,根据维护指令控制不同的无人机到主仓库或沿途维护站进行停机维护。
[0041]
本发明所取得的有益效果是:
[0042]
1、巡线任务分配终端、无人机控制终端、无人机监测终端、巡线信息管理终端和无人机维护指令生成终端的设置有利于根据无人机的机体情况分配对应难度的巡线任务,提高任务完成率,而且无人机控制和监测同步进行,实时管理无人机进行巡线任务时的状态和数据,独立的无人机维护指令生成终端有利于及时对无人机进行维护,减少无人机损坏的情况,从而提高了巡线效率;
[0043]
2、无人机飞行状态接收模块和无人机硬件状态接收模块的设置有利于实时且准确地接收无人机的飞行状态和硬件状态,从而提高巡线效率;
[0044]
3、无人机信息获取模块、任务难度计算模块、无人机任务能力评定模块和巡线任务分配模块的设置配合任务难度计算算法和无人机任务能力评定算法,有利于快捷且准确地计算出各种巡线任务的任务难度和各架无人机的任务能力,进而合理地分配巡线任务至对应的无人机,使得巡线任务更容易被完成,进而提高了巡线任务的完成率,也提高了巡线效率;
[0045]
4、无人机维护指数计算模块、无人机位置获取模块和无人机维护指令生成模块的设置配合无人机维护指数计算算法,有利于通过准确的无人机维护指数判定无人机是否需要进行维护,再通过无人机的位置信息为对应的无人机安排合适的维护点,进而优化了维护管理,使得无人机能被及时维护,从而提高了巡线效率;
[0046]
5、任务地点环境等级计算子模块和任务难度计算子模块的设置配合任务地点环境等级计算算法,有利于提高任务地点环境等级的准确性,从而提高任务难度计算的准确性;
[0047]
6、指挥安排起始模块、维护顺序确认模块、指挥指令生成模块和指挥指令发送模
块的设置配合指挥安排起始算法和维护顺序算法,有利于更有序地管理维护点的无人机,提高了维护效率,也提高了巡线效率。
[0048]
为使能更进一步了解本发明的特征及技术内容,请参阅以下有关本发明的详细说明与附图,然而所提供的附图仅用于提供参考与说明,并非用来对本发明加以限制。
附图说明
[0049]
图1为本发明的整体结构示意图;
[0050]
图2为本发明中一种应用于复杂电磁环境下的配电网无人机自主巡线方法的方法流程示意图;
[0051]
图3为本发明的另一整体结构示意图;
[0052]
图4为本发明中维护点内等待区和维护区的应用效果示意图。
具体实施方式
[0053]
以下是通过特定的具体实施例来说明本发明的实施方式,本领域技术人员可由本说明书所公开的内容了解本发明的优点与效果。本发明可通过其他不同的具体实施例加以施行或应用,本说明书中的各项细节也可基于不同观点与应用,在不背离本发明的精神下进行各种修饰与变更。另外,本发明的附图仅为简单示意说明,并非依实际尺寸描绘,事先声明。以下实施方式将进一步详细说明本发明的相关技术内容,但所公开的内容并非用以限制本发明的保护范围。
[0054]
实施例一。
[0055]
本实施例提供了一种应用于复杂电磁环境下的配电网无人机自主巡线方法和系统。结合图1所示,一种应用于复杂电磁环境下的配电网无人机自主巡线系统,其特征在于,包括巡线任务分配终端、无人机控制终端、无人机监测终端、巡线信息管理终端和无人机维护指令生成终端;
[0056]
所述巡线任务分配终端用于将不同的巡线任务分配至无人机主仓库内不同的无人机;所述无人机控制终端用于根据巡线任务控制对应的无人机完成飞行任务;所述无人机监测终端用于实时监测全部无人机的飞行状态和硬件状态;所述巡线信息管理终端用于接收不同无人机进行巡线任务时的各种巡线信息,对巡线信息进行分析和管理;所述无人机维护终端用于根据无人机的飞行状态和硬件状态生成对应无人机的维护指令;
[0057]
所述无人机控制终端还用于根据维护指令控制不同的无人机到主仓库或沿途维护站进行停机维护。
[0058]
可选的,所述无人机监测终端包括无人机飞行状态接收模块和无人机硬件状态接收模块;所述无人机飞行状态接收模块用于接收全部无人机的飞行状态信息;所述无人机硬件状态接收模块用于接收全部无人机的硬件状态信息。
[0059]
可选的,所述巡线任务分配终端包括无人机信息获取模块、任务难度计算模块、无人机任务能力评定模块和巡线任务分配模块;所述无人机信息获取模块用于获取待分配任务的无人机的机体信息;所述任务难度计算模块用于计算各类型巡线任务的难度等级;所述无人机任务能力评定模块用于根据无人机的机体信息为对应的无人机评定任务能力;所述巡线任务分配模块用于根据巡线任务的难度等级和无人机的任务能力进行巡线任务分
配;
[0060]
当所述任务难度计算模块计算时,满足以下式子:
[0061][0062][0063]
其中,r1表示任务难度指数;q1表示任务涉及的飞行距离;q2表示任务地点的海拔高度;q3表示任务地点的电线输电电压;q4表示任务地点的电线处磁场大小值;p表示预设的任务地点环境等级;w表示任务难度等级;μ1和μ2分别表示第一阈值和第二阈值,均由工程师根据经验设定;k1至k4表示指数转换系数,均由工程师根据经验设定;
[0064]
当所述无人机任务能力评定模块工作时,满足以下式子:
[0065][0066][0067][0068][0069]
其中,r2表示无人机任务能力指数;e
now
表示无人机的机体年龄;e
ref
表示标准机体年龄;m表示无人机的维护总次数;f1(o)表示基于无人机电池年龄的指数选择函数;o表示无人机的电池年龄;max表示最大指数值,由工程师根据经验设定;f2(t)表示基于前一次维护的间隔年数的符号确认函数;t表示无人机当天到前一次维护的间隔年数;u表示指数变换基准值,由工程师根据经验设定。和表示权重型指数转化系数,由工程师根据经验设置;y表示基于无人机任务能力指数的无人机任务能力;η1和η2表示定级阈值,均由工程师根据经验设定;所述巡线任务分配模块分配巡线任务时,将确认等级后的巡线任务分配至具有相同等级的任务能力的无人机。
[0070]
可选的,所述无人机维护指令生成终端包括无人机维护指数计算模块、无人机位置获取模块和无人机维护指令生成模块;所述无人机维护指数计算模块用于计算对应无人机的维护指数;所述无人机位置获取模块用于实时获取无人机的位置信息;所述无人机维护指令生成模块用于根据无人机的维护指数和位置信息生成对应的维护指令并发送至无
人机控制终端;
[0071]
当所述无人机维护指数计算模块计算时,满足以下式子:
[0072][0073][0074][0075]
其中,z表示无人机的维护指数;f4(f&g)表示基于飞行状态和硬件状态的权重选择函数;f表示飞行状态;g表示硬件状态;f=0表示飞行状态正常;f=1表示飞行状态异常;g=0表示硬件状态正常;g=1表示硬件状态异常;a
max
表示最大权重系数,由工程师根据经验设定;f3(d)表示基于无人机电池电量的系数选择函数;d表示无人机电池电量;d表示对比参考值,由工程师根据经验设定;t
′
表示无人机的维护间隔年数参考值,由工程师根据实际情况设定;当无人机的机身年龄e
now
大于电池年龄o,则t
′
取2年;当无人机的机身年龄e
now
小于等于电池年龄o,则t
′
取5年。
[0076]
λ2表示维护间隔比例的权重系数,由工程师根据经验设定;λ1表示电量对比值的最小权重系数;λ
max
表示电量对比值的最大权重系数;λ1和λ
max
均由工程师根据经验设定;当z≥δ时,表示无人机需要进行维护,所述无人机维护指令生成模块根据无人机的位置信息为需要进行维护的无人机选择对应的维护地点;δ由工程师根据经验预先设定;当f4(f&g)=a
max
时,z≥δ;当f3(d)=λ
max
时,z≥δ。
[0077]
可选的,所述任务难度计算模块包括任务地点环境等级计算子模块和任务难度计算子模块;所述任务地点环境等级计算子模块用于根据任务地点的天气因素和环境因素计算任务地点环境等级;所述任务难度计算子模块用于根据任务地点环境等级计算各类型巡线任务的难度等级;
[0078]
当所述任务地点环境等级计算子模块计算时,满足以下式子:
[0079][0080][0081]
其中,c表示任务地点环境等级选择评分;xi表示执行任务当天的天气预报中第i种非晴天天气的预报持续小时数;非晴天天气是指天气预报中除了晴天以外的各种天气类型;i表示非晴天天气的种类数;l1表示电线下方树林沿电线延伸方向的占地跨度距离;l2表示对应树林占地跨度距离上方电线的电线长度;β1和β2表示任务地点环境等级划分阈值,均由工程师根据经验设定。
[0082]
一种应用于复杂电磁环境下的配电网无人机自主巡线方法,应用于如上述的一种应用于复杂电磁环境下的配电网无人机自主巡线系统,结合图2所示,所述巡线方法包括:
[0083]
s1,将不同的巡线任务分配至无人机主仓库内不同的无人机;
[0084]
s2,根据巡线任务控制对应的无人机完成飞行任务;
[0085]
s3,实时监测全部无人机的飞行状态和硬件状态;
[0086]
s4,接收不同无人机进行巡线任务时的各种巡线信息,对巡线信息进行分析和管理;
[0087]
s5,根据无人机的飞行状态和硬件状态生成对应无人机的维护指令;
[0088]
s6,根据维护指令控制不同的无人机到主仓库或沿途维护站进行停机维护。
[0089]
实施例二。
[0090]
本实施例包含了实施例一的全部内容,提供了一种应用于复杂电磁环境下的配电网无人机自主巡线方法和系统,结合图3所示,所述无人机自主巡线系统还包括维护点指挥终端,所述维护点指挥终端用于管理维护点处全部无人机的维护顺序和停机位置;所述维护点指挥终端包括指挥安排起始模块、维护顺序确认模块、指挥指令生成模块和指挥指令发送模块;所述指挥安排起始模块用于根据维护点等待区的无人机数量和飞往对应维护点途中的无人机的抵达剩余时长生成指挥安排起始指令;所述维护顺序确认模块用于根据指挥安排起始指令对等待区内的无人机进行维护顺序确认,生成对应的维护顺序信息;所述指挥指令生成模块用于根据维护顺序信息对等待区内的无人机生成指挥指令;所述指挥指令发送模块用于将指挥指令发送至无人机控制终端,以至于无人机控制终端将等待区内的无人机控制至维护区对应的停机位。
[0091]
需要注意的是,结合图4所示,维护点包括主仓库和各个沿途维护站,每个维护点中均设有等待区和维护区。无人机飞行至维护点之后先就降落于等待区,等待接收到指挥指令的无人机控制终端将无人机控制至维护区。维护区内设有至少10个停机位,每个停机位按照编号从小到大的顺序排列,维护工人按停机位编号从小到大的顺序进行维护工作。
[0092]
当指挥安排起始模块工作时,满足以下式子:
[0093][0094]
其中,s表示指挥安排起始指令选择函数;s=1是指指挥安排起始指令表示开始安排;s=0是指指挥安排起始指令表示未开始安排;wait表示等待区的无人机数量;full表示等待区的最大停机数;next表示飞往维护点途中的无人机的最小抵达剩余时长。
[0095]
维护顺序确认模块接收到s=1的指挥安排起始指令后立刻对等待区内的无人机进行维护顺序确认,满足以下式子:
[0096][0097]
其中,v表示维护顺序分值;w表示任务难度等级;o表示无人机的电池年龄;d表示无人机电池电量;电池电量为百分比形式的数据;j表示无人机执行的巡线任务的剩余任务距离;维护顺序确认模块以等待区内全部无人机的维护顺序分值作为排序参数,将维护顺序分值由大到小的顺序作为等待区内全部无人机的维护先后顺序。当维护顺序分值相同
时,相同维护顺序分值的无人机之间的维护顺序由工程师安排或由系统随机安排。
[0098]
指挥指令生成模块根据维护顺序信息中的维护顺序为等待区中的无人机按维护区停机位的编号从小到大的顺序确认停机位,进而生成对应的指挥指令。
[0099]
以上所公开的内容仅为本发明的优选可行实施例,并非因此局限本发明的保护范围,所以凡是运用本发明说明书及附图内容所做的等效技术变化,均包含于本发明的保护范围内,此外,随着技术发展其中的元素是可以更新的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1