机器人焊接系统、机器人操作终端以及焊接机器人示教程序的制作方法
本发明涉及机器人焊接系统、机器人操作终端以及焊接机器人示教程序。
背景技术:
1、在通过机器人使焊枪、焊炬移动来进行焊接作业的机器人焊接中,一般需要示教机器人的动作的作业。在机器人的示教作业中,需要以机器人或机器人所保持的焊枪、焊炬不与周围的设备或对象物接触的方式,慎重地使机器人动作。
2、作为例子,在示教电弧焊接机器人的情况下,优选使焊丝从焊炬的前端突出到与进行实际焊接时相同的长度,一边确认该焊丝与对象物的位置关系一边进行机器人的示教。然而,在实际使机器人动作来进行示教的情况下,有可能错误地使焊丝与对象物抵接而使焊丝弯曲。在焊丝弯曲的状态下无法进行准确的示教,因此每次都需要使焊丝返回到适当的状态。因此,示教作业需要慎重地操作机器人,以使焊丝尽量不与对象物抵接,是对操作人员要求熟练度的作业。
3、作为进行机器人的示教的技术,提出了如下技术:在计算机上构成机器人以及周边设备的3维模型,通过模拟机器人的动作来防止机器人实际与周边设备接触的故障(例如,参照专利文献1)。
4、现有技术文献
5、专利文献
6、专利文献1:日本特开2003-165079号公报
技术实现思路
1、发明所要解决的课题
2、在通过模拟示教焊接机器人的动作的情况下,需要周边设备以及对象物的精密的3维模型,该数据的准备较复杂。因此,期望能够容易地进行焊接机器人的示教的系统。
3、本发明的目的在于提供一种能够容易地进行焊接机器人的示教的系统。
4、用于解决课题的手段
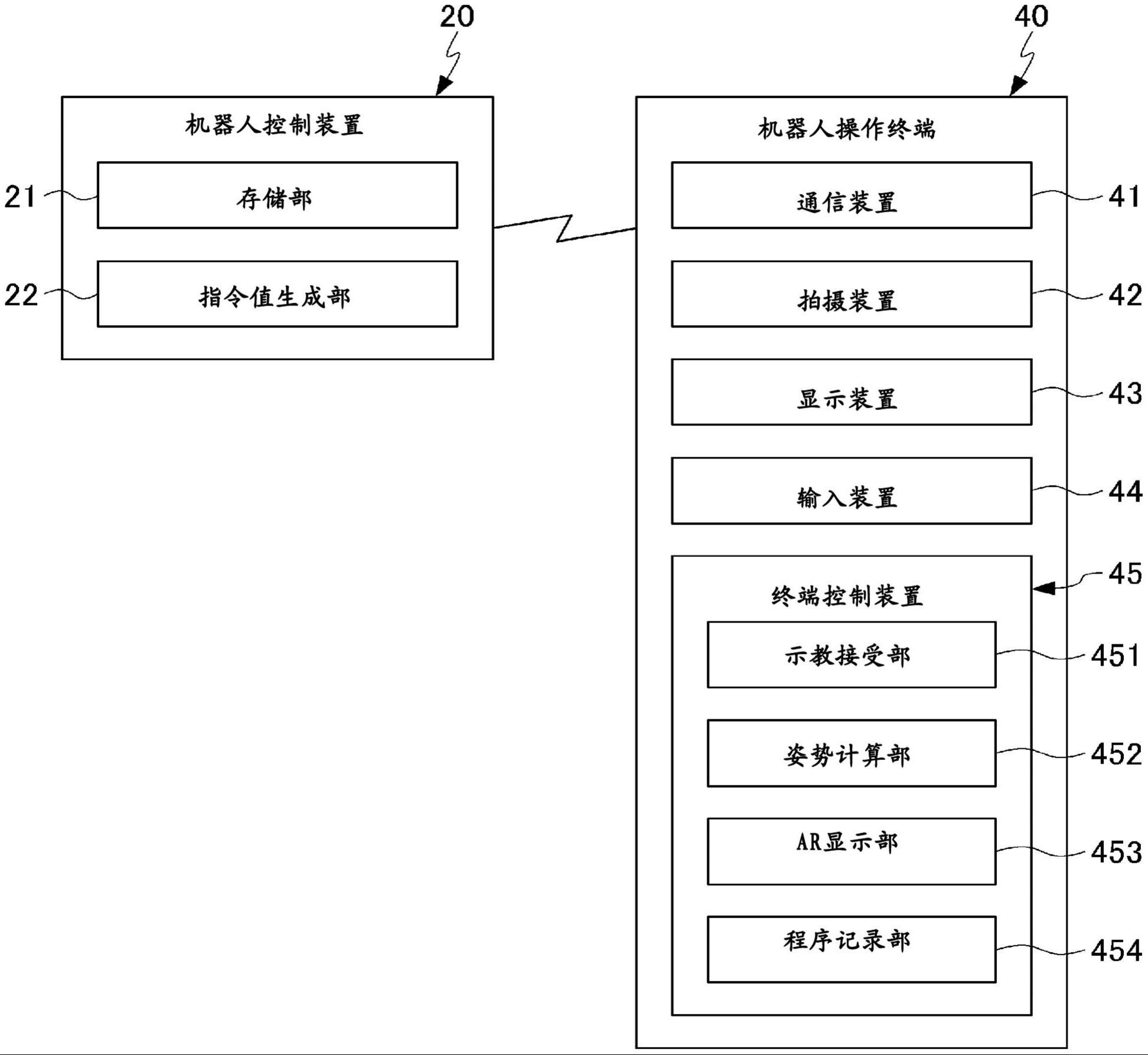
5、本公开的一个方式的机器人焊接系统具备:机器人;机器人控制装置,其根据加工程序来控制所述机器人;焊炬,其安装于所述机器人的前端,对对象物进行电弧焊接;以及机器人操作终端,其具有拍摄装置、显示装置以及终端控制装置,与所述机器人控制装置进行通信,所述终端控制装置具有接受所述机器人的示教信息的输入的示教接受部,所述机器人控制装置或者所述终端控制装置具备:姿势计算部,其基于所述机器人控制装置存储的所述机器人的基本信息和所述加工程序以及输入到所述示教接受部的示教信息,计算所述焊炬的姿势;ar显示部,其使所述显示装置将与所述拍摄装置拍摄到的图像对应的所述焊炬的动作信息重叠地显示在所述拍摄装置拍摄到的图像上;以及程序记录部,其基于所述示教信息,使所述机器人控制装置修正或重新存储所述加工程序。
6、本公开的另一方式的机器人操作终端在机器人焊接系统中,进行所述机器人的示教,所述机器人焊接系统根据加工程序,通过安装于由机器人控制装置控制的机器人的前端的焊炬进行对象物的电弧焊接,所述机器人操作终端具备拍摄装置、显示装置以及终端控制装置,所述终端控制装置具备:示教接受部,其接受所述机器人的示教信息的输入;姿势计算部,其根据所述机器人控制装置存储的所述机器人的基本信息和所述加工程序以及输入到所述示教接受部的示教信息,计算所述焊炬的姿势;ar显示部,其使所述显示装置将与所述拍摄装置拍摄到的图像对应的所述焊炬的动作信息重叠地显示在所述拍摄装置拍摄到的图像上;以及程序记录部,其基于所述示教信息,使所述机器人控制装置修正或重新存储所述加工程序。
7、本公开的另一方式的焊接机器人示教程序在机器人焊接系统中,能够通过具有拍摄装置、显示装置以及终端控制装置的便携终端进行所述机器人的示教,所述机器人焊接系统通过安装于由机器人控制装置按照加工程序控制的机器人的前端的焊炬,进行对象物的电弧焊接,所述焊接机器人示教程序具备:示教控制部,其接受所述机器人的示教信息的输入;姿势计算控制部,其基于所述机器人控制装置存储的所述机器人的基本信息和所述加工程序以及所述示教控制部接收到的示教信息,计算所述焊炬的姿势;ar显示控制部,其使所述显示装置将与所述拍摄装置拍摄到的图像对应的所述焊炬的动作信息重叠地显示在所述拍摄装置拍摄到的图像上;以及程序记录控制部,其基于所述示教信息,使所述机器人控制装置修正或重新存储所述加工程序。
8、发明效果
9、根据本公开的机器人焊接系统、机器人操作终端以及焊接机器人示教程序,能够容易地进行焊接机器人的示教。
技术特征:
1.一种机器人焊接系统,其特征在于,
2.根据权利要求1所述的机器人焊接系统,其特征在于,
3.根据权利要求1或2所述的机器人焊接系统,其特征在于,
4.根据权利要求1至3中任一项所述的机器人焊接系统,其特征在于,
5.根据权利要求1至4中任一项所述的机器人焊接系统,其特征在于,
6.根据权利要求1至5中任一项所述的机器人焊接系统,其特征在于,
7.一种机器人操作终端,其在机器人焊接系统中,进行所述机器人的示教,所述机器人焊接系统根据加工程序,通过安装于由机器人控制装置控制的机器人的前端的焊炬进行对象物的电弧焊接,其特征在于,
8.一种焊接机器人示教程序,其在机器人焊接系统中,能够通过具有拍摄装置、显示装置以及终端控制装置的便携终端进行所述机器人的示教,所述机器人焊接系统通过安装于由机器人控制装置按照加工程序控制的机器人的前端的焊炬,进行对象物的电弧焊接,其特征在于,
技术总结
本发明提供一种能够容易地进行焊接机器人的示教的系统。本公开的一个方式的机器人焊接系统具备机器人、机器人控制装置、焊炬、以及具有拍摄装置、显示装置和终端控制装置的机器人操作终端,终端控制装置具有接受机器人的示教信息的输入的示教接受部,机器人控制装置或者终端控制装置具有:姿势计算部,其基于机器人的基本信息和加工程序以及输入到示教接受部的示教信息,计算焊炬的姿势;AR显示部,其使显示装置将与所述拍摄装置拍摄到的图像对应的所述焊炬的动作信息重叠显示在所述拍摄装置拍摄到的图像上;以及程序记录部,其基于示教信息,使机器人控制装置修正或者新存储加工程序。
技术研发人员:小寺瞬
受保护的技术使用者:发那科株式会社
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!