一种智能船舰节能航向编队方法、系统及存储介质与流程
本发明涉及船舶交通调度,更具体涉及一种智能船舰节能航行编队方法、系统及存储介质。
背景技术:
1、随着船舰运输的发展和运输任务的日益繁重,多种不同种类的船舰组成集群来共同完成运输任务,由于船舰的数量增多,运输成本也随着增加,因此通过研究船舰队列的编队方式来降低能耗达到节省能源的目的越来越受到大家的重视,但是现有专利中,只考虑到航道阻力没有考虑到船舰的能源消耗率和不同位置处的水流阻力,例如中国专利:cn115270644b,本发明涉及一种智能船舶节能航行编队方法、电子设备和存储介质,其通过样本数据集训练深度前馈神经网络,得到能够表征工况特征和阻力特征之间映射关系的阻力预报模型,其中工况特征包括用于描述不同队形的队形特征,这样通过阻力预报模型,便可以知晓船舶队伍在不同队形特征下的阻力信息,这样根据阻力信息,便可以选择出船舶在对应航行计划下的最优队形,得到最优编队方案。例如中国专利cn109116849a,一种考虑无人艇运动性能的零空间行为融合在线优化方法,本发明以零空间行为规划结果为基础,解算出符合无人艇实际运动特性的航点集,解决无人艇在跟踪规划路线时的迂回航行或者路径点不可达问题;针对零空间行为融合方法规划结果进行的优化,考虑无人艇的回转性能,光顺规划的航点集,进而有助于提高无人艇的控制精度;减少了能源消耗,有助于节约能源。上述两个专利都没有考虑到船舰队列平稳行驶的最佳路径,也没有考虑到水流阻力在航行方向上的贡献值不同时最佳路径范围内的最佳编队队形,也没有根据船舰的行驶数据发生变化时其前面位置处船舰的速度变化和上述船舰的位置调整,从而不能达到理想的节能效果。
技术实现思路
1、为了更好的解决上述问题,本发明提供一种智能船舰节能航向编队方法,所述方法包括如下步骤:
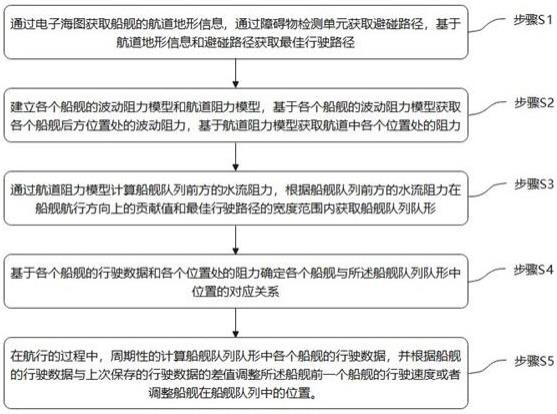
2、步骤s1:通过电子海图获取船舰的航道的地形信息,通过障碍物检测单元获取避碰路径,基于所述地形信息和所述避碰路径实时获取最佳行驶路径;
3、步骤s2:通过机器学习建立各个船舰的波动阻力模型和航道中的航行阻力模型,基于所述各个船舰的波动阻力模型获取所述各个船舰后方位置处的波动阻力,基于所述航道阻力模型获取航道中各个位置处的阻力;
4、步骤s3:通过所述航道阻力模型计算船舰队列前方的水流阻力,根据所述船舰队列前方的水流阻力在船舰航行方向上的贡献值和所述最佳行驶路径的宽度范围内获取船舰队列队形;
5、步骤s4:还基于所述航道阻力模型计算所述船舰队列队形中各个位置处的阻力,并基于所述各个位置处的阻力计算各个船舰的行驶数据,所述行驶数据包括所述各个舰船在所述各个位置处能源消耗率和所述各个船舰后方的波动阻力之和,基于所述行驶数据确定所述各个船舰与所述船舰队列队形中位置的对应关系;
6、步骤s5:在航行的过程中,周期性的计算所述船舰队列队形中各个船舰的行驶数据,并根据船舰的行驶数据与上次保存的行驶数据的差值调整所述船舰前一个船舰的行驶速度或者调整所述船舰在所述船舰队列中的位置。
7、作为本发明一种更优选的技术方案,步骤s1中,通过计算全部船舰的吃水深度,根据所述全部船舰的吃水深度获取最大吃水深度,基于所述电子海图和所述最大吃水深度获取水下障碍物的位置信息,所述障碍物检测单元包括雷达感应器,根据所述雷达感应器检测船舰周围的障碍物位置信息,基于所述障碍物位置信息获取所述避碰路径。
8、作为本发明一种更优选的技术方案,步骤s3中,根据所述船舰队列前方的水流阻力在船舰航行方向上的贡献值获取船舰船舰队列队形,包括:根据所述船舰队列前方的水流阻力的大小和方向计算所述水流阻力在船舰航行方向上的阻力分量,在所述阻力分量与所述航行方向一致时,所述阻力分量为正值,全部船舰在最佳行驶路径的宽度范围以最大编队宽度行驶,在所述阻力分量与所述航行方向不一致时,所述阻力分量为负值,所述全部船舰在最佳行驶路径的宽度范围内以最小编队宽度行驶。
9、作为本发明一种更优选的技术方案,步骤s4中,船舰的能源消耗率为行驶预设距离能源消耗量与船舰重量、船舰阻力、湿面积、行驶速度和水流阻力的乘积的比值再乘以权重系数,所述能源消耗率的表达式为:
10、,
11、其中,为第i船舰的能源消耗率,为第i船舰行驶预设距离能源消耗量,为第i船舰的载重和携载货物的重量之和,为第i船舰位置处的水流阻力,为第i船舰的行驶速度,为权重系数,为第i船舰的湿面积,i的取值范围为1到n的正整数,n为参与编队的船舰的总数量。
12、作为本发明一种更优选的技术方案,所述步骤s4中,基于所述行驶数据和各个位置处的阻力确定所述各个船舰与所述船舰队列队形中位置的对应关系,包括如下步骤:
13、步骤s41:根据各个船舰的能源消耗率和所述各个船舰后方的波动阻力计算所述各个船舰的行驶数据,所述各个船舰的行驶数据表达式为:
14、,
15、其中,为第i船舰的航行数据,为第i船舰的能源消耗率,为第i船舰后方的波动阻力,为第i船舰的能源消耗率的权重系数,为第i船舰后方的波动阻力的权重系数;
16、步骤s42:所述船舰队列中第一行的船舰为领航舰,所述船舰队列以预设速度行驶,根据所述船舰队列中未编排船舰的位置中获取阻力最大的位置,并基于所述阻力最大的位置处的水流阻力和通过所述各个船舰的行驶数据表达式计算未编排位置的船舰在所述阻力最大位置处的行驶数据,并将所述未编排位置的船舰中行驶数据最小的船舰放置在所述阻力最大的位置处;
17、步骤s43:重复所述步骤s42,获取所述船舰队列中每一位置对应的船舰。
18、作为本发明一种更优选的技术方案,所述步骤s5中,周期性的计算第i船舰的第一行驶数据,并将所述第一行驶数据与所述第i船舰上次保存的第二行驶数据进行比较获取第一差值,在所述第一差值小于第一阈值时,正常行驶;
19、在所述第一差值大于所述第一阈值时,在所述第一行驶数据小于所述第二行驶数据时,正常行驶;在所述第一行驶数据大于所述第二行驶数据时,计算第i+1船舰在第i船舰位置处的第三行驶数据,在所述第一行驶数据小于所述第三行驶数据时,正常行驶,并保存所述第一行驶数据至存储单元,在所述第一行驶数据大于所述第三行驶数据时,计算所述第一行驶数据和所述第三行驶数据的第二差值,在所述第二差值小于第二阈值时,通过第i船舰位置处前方的第j船舰的波动阻力模型获取第一速度,所述第j船舰在所述第一速度行驶时满足行驶数据与上次保存的第j船舰的行驶数据之间的差值小于所述第一阈值,通过通信单元将第一速度信息发送给所述第j舰船,所述第j船舰接收所述第一速度信息并以所述第一速度在安全距离范围内脉冲式前进以减小所述第i船舰的波动阻力,其中所述第一速度大于船舰队列的预设速度;
20、在所述第二差值大于所述第二阈值或者不能获取所述第一速度时,将所述第i船舰驶出对应的位置,依次计算第k船舰在第k-1位置处的行驶数据及第i船舰在第k-1位置处的行驶数据,在第i船舰在第k-1位置处的行驶数据小于第k舰船在第k-1位置处的行驶数据时,将所述第i船舰放置在第k-1位置处,将第i+1船舰至第k-1船舰向前平移一个位置,其中,k的取值范围为i+2到n的正整数。
21、作为本发明一种更优选的技术方案,所述第j船舰以所述第一速度在安全距离范围内脉冲式前进,包括:在所述第j船舰与所述第i船舰的距离小于等于第一安全距离时以第一速度向前航行,在所述第j船舰与前方船舰的距离小于等于第二安全距离时,所述第j船舰暂停至与所述第i船舰的距离小于等于第一安全距离。
22、本发明还提供一种智能船舰节能航向编队系统,用于实现上述的智能船舰节能航向编队方法,所述系统包括:
23、地形获取单元,用于从电子海图获取船舰的航道的地形信息;
24、障碍物检测单元,用于获取避碰路径;
25、路径规划单元,用于基于地形信息和避碰路径实时获取最佳行驶路径;
26、机器学习单元配置为:通过机器学习建立各个船舰的波动阻力模型和航道中的航行阻力模型,基于所述各个船舰的波动阻力模型获取所述各个船舰后方位置处的波动阻力,基于所述航道阻力模型获取航道中各个位置处的阻力;
27、存储单元,用于保存船舰队列中各个船舰的行驶数据;
28、计算单元配置为:通过航道阻力模型计算船舰队列前方的水流阻力,根据船舰队列前方的水流阻力在船舰航行方向上的贡献值和最佳行驶路径的宽度范围内获取船舰队列队形;
29、还基于航道阻力模型计算所述船舰队列队形中各个位置处的阻力,并基于各个位置处的阻力计算各个船舰的行驶数据,行驶数据包括所述各个舰船在所述各个位置处能源消耗率和各个船舰后方的波动阻力之和,基于行驶数据确定各个船舰与船舰队列队形中位置的对应关系;
30、在航行的过程中,周期性的计算船舰队列队形中各个船舰的行驶数据,并根据船舰的行驶数据的与上次保存的行驶数据的差值调整船舰前一个船舰的行驶速度,在通过调整船舰的前一个船舰的行驶速度不能使船舰的行驶数据满足要求的情况下,调整船舰在船舰队列中的位置;
31、通信单元,用于实现编队系统和船舰队列中船舰之间的通信。
32、本发明还提供一种存储介质,所述存储介质存储有程序指令,其中在所述程序指令运行时控制所述存储介质所在设备执行上述的智能船舰节能航向编队方法。
33、与现有技术相比,本发明的有益效果至少如下所述:
34、本发明通过电子海图和障碍物检测单元获取能够保证船舰队列平稳行驶的较节能的最佳行驶路线,并在最佳行驶路线中根据航道阻力模型获取船舰队列前方的水流阻力并根据水流阻力在航行方向上的作用力确定船舰队列队形,在水流阻力为正向作用力时,以最大队列宽度在最佳路径中航行,增加整个船舰队列的水流推动力,从而达到节能的目的,在水流阻力为反作用力时,以最小队列宽度在最佳路径中航行,减少水流阻力,从而达到节能的目的,进一步地,还根据各个位置处的水流阻力和各个船舰的行驶数据来分配编队队列中的位置,不仅考虑单个船舰的能源消耗率与水流阻力的关系还考虑到船舰后方波动阻力大小,能够使用较小的能源消耗来抵挡较大的水流阻力,并开辟了一条阻力较小的航道,减小后续船舰的水流阻力,从而提高整个船舰队列的节能效率,并且在行驶过程中,周期性的计算所述船舰队列队形中各个船舰的行驶数据,并根据船舰的行驶数据的与上次保存的行驶数据的差值调整所述船舰前一个船舰的行驶速度或者调整所述船舰在船舰队列中的位置,通过上述技术方案的相互作用和配合,使整个船舰队列在行驶过程中的节省了能源消耗,提高了能源的利用率。
- 还没有人留言评论。精彩留言会获得点赞!