机器学习装置、控制装置以及机器学习方法与流程
本发明涉及机器学习装置、控制装置以及机器学习方法。
背景技术:
1、由于制定近年来的可持续的开发目标(sustainable development goals:sdgs),在汽车、运输设备产业等中节能成为重要课题。因此,在汽车、运输设备产业等中,面向电动化、轻量化的对策正在加速。
2、例如,在实现轻量化的方面,cfrp(carbon fiber reinforced plastics:碳纤维增强塑料)由于轻量且强度高,因此研究作为适合轻量化的材料来使用。但是,cfrp在其特性上难以通过接触工具进行切断(热影响、原材料结构的破坏或剥离、工具磨损等)。因此,期待利用激光进行高速且高品质的加工。
3、已知使用超短脉冲激光(例如,脉冲宽度为飞秒(10-15)单位的飞秒脉冲激光等)的高品质加工、微细加工、烧蚀加工等抑制了热影响的cfrp切断技术(与远程切割相比热影响更小)。例如,参照专利文献1。
4、现有技术文献
5、专利文献
6、专利文献1:日本特开2017-131956号公报
技术实现思路
1、发明所要解决的课题
2、然而,通过超短脉冲激光而抑制了热影响的切断加工在一次扫描中无法切断,因此反复进行多次扫描。此时,反复扫描同一部位,但为了避免由于对cfrp的热影响的增加而导致的加工精度降低,需要从上次的激光扫描开始隔开时间(待机)来进行扫描。由此,需要(扫描时间+待机时间)×重复次数的加工时间,生产效率降低。
3、因此,提出了通过选定最优的加工条件来间接地缩短扫描时间的技术,但尚未提出使待机时间最小化来缩短加工时间的技术。
4、另外,关于成为加工对象的cfrp,根据用途而开发出各种(纤维形态、树脂原材料)的cfrp,针对每个材料选定最优化的加工条件。因此,需要针对无数的加工条件求出最小的待机时间。
5、因此,期望在维持高加工精度的状态下使待机时间最小化来缩短加工时间。
6、用于解决课题的手段
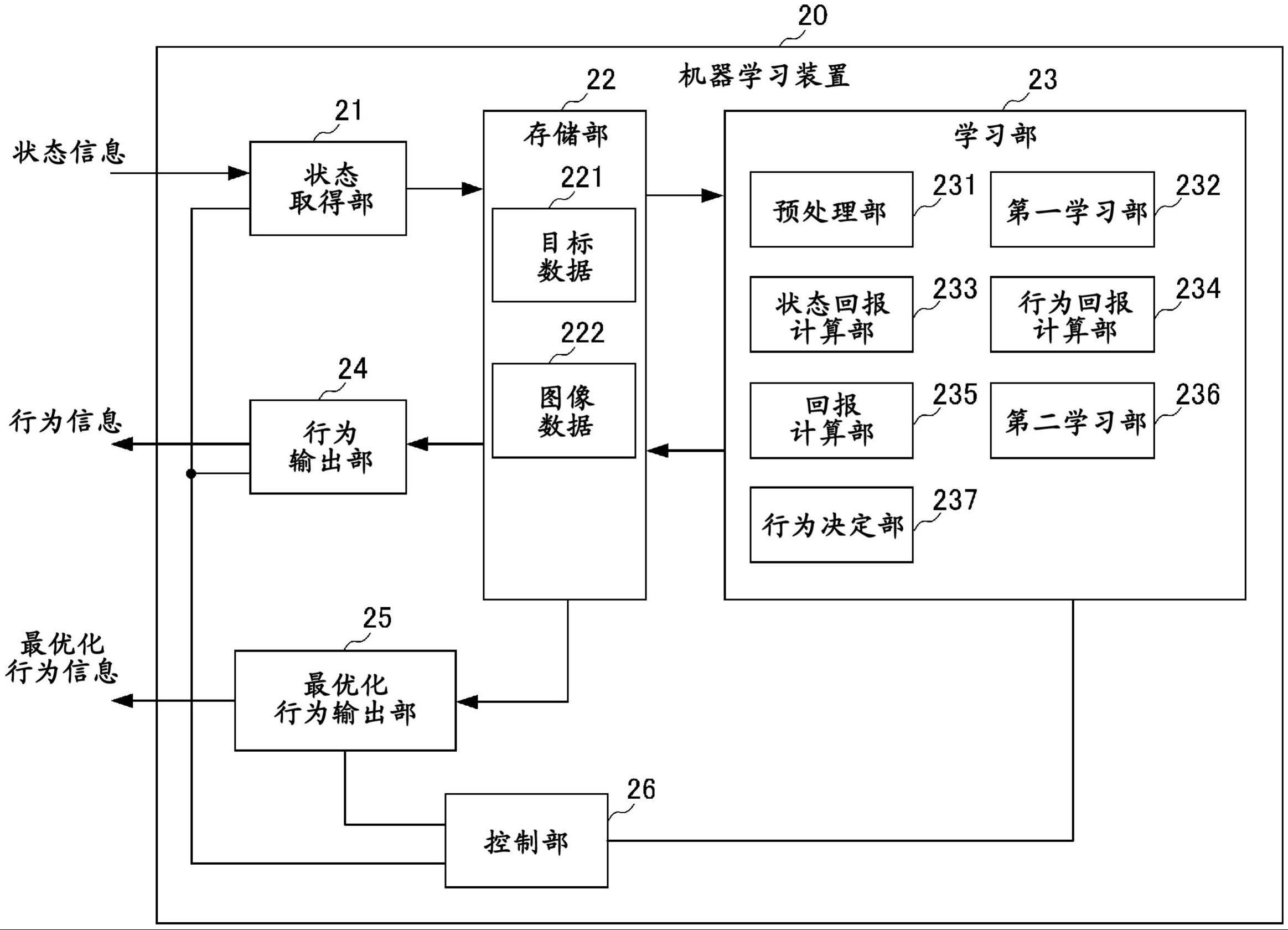
7、(1)本公开的机器学习装置的一方式是在激光加工机中进行用于对加工对象物的加工进行控制的至少包含激光扫描的待机时间的加工条件的机器学习,所述机器学习装置具备:行为输出部,其从多个加工条件中选择加工条件作为行为,并向所述激光加工机输出行为;状态取得部,其取得对通过所述行为加工后的加工对象物的加工状态进行拍摄而得到的图像数据来作为状态信息;回报计算部,其至少根据基于由所述状态取得部取得的所述状态信息计算出的所述加工状态的加工精度以及所述激光扫描的待机时间来计算回报;以及学习部,其根据由所述状态取得部取得的所述状态信息以及由所述回报计算部计算出的所述回报来进行所述加工条件的机器学习。
8、(2)本公开的控制装置的一方式具备:(1)的机器学习装置;以及控制部,其根据所述加工条件来控制激光加工机。
9、(3)本公开的机器学习方法的一方式由计算机实现,在激光加工机中进行用于对加工对象物的加工进行控制的至少包含激光扫描的待机时间的加工条件的机器学习,在机器学习方法中,从多个加工条件中选择加工条件来作为行为,向所述激光加工机输出行为,取得对通过所述行为加工后的加工对象物的加工状态进行拍摄而得到的图像数据来作为状态信息,至少根据基于所取得的所述状态信息计算出的所述加工状态的加工精度以及所述激光扫描的待机时间来计算回报,根据所取得的所述状态信息以及计算出的所述回报来进行所述加工条件的机器学习。
10、发明效果
11、根据一方式,能够在维持高加工精度的状态下使待机时间最小化来缩短加工时间。
技术特征:
1.一种机器学习装置,其在激光加工机中进行用于对加工对象物的加工进行控制的至少包含激光扫描的待机时间的加工条件的机器学习,
2.根据权利要求1所述的机器学习装置,其特征在于,
3.根据权利要求1或2所述的机器学习装置,其特征在于,
4.根据权利要求3所述的机器学习装置,其特征在于,
5.根据权利要求1至4中的任意一项所述的机器学习装置,其特征在于,
6.根据权利要求1至5中的任意一项所述的机器学习装置,其特征在于,
7.根据权利要求1至6中的任意一项所述的机器学习装置,其特征在于,
8.根据权利要求1至7中的任意一项所述的机器学习装置,其特征在于,
9.一种控制装置,其特征在于,具备:
10.一种机器学习方法,其由计算机实现,在激光加工机中进行用于对加工对象物的加工进行控制的至少包含激光扫描的待机时间的加工条件的机器学习,
技术总结
在维持高的加工精度的状态下,使待机时间最小化来缩短加工时间。机器学习装置在激光加工机中进行用于对加工对象物的加工进行控制的至少包含激光扫描的待机时间的加工条件的机器学习,机器学习装置具备:行为输出部,其从多个加工条件中选择加工条件来作为行为,并向激光加工机输出行为;状态取得部,其取得对通过所述行为加工后的加工对象物的加工状态进行拍摄而得到的图像数据来作为状态信息;回报计算部,其至少根据所述激光扫描的待机时间以及基于所述状态取得部取得的状态信息而计算出的所述加工状态的加工精度来计算回报;学习部,其根据所述状态取得部取得的所述状态信息以及所述回报计算部计算出的所述回报来进行所述加工条件的机器学习。
技术研发人员:八木顺
受保护的技术使用者:发那科株式会社
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!