移动方向纠偏方法、系统及自移动机器人与流程
本发明涉及清洁设备,特别涉及一种移动方向纠偏方法、系统及自移动机器人。
背景技术:
1、随着自动化技术和人工智能技术的不断发展,洗地机、扫地机等各种自移动机器人的应用越来越广泛,给人们的生活带了极大的便利。在传统技术中,扫地机等自移动机器人在清洁过程中,一般会按照预设的清洁地图在待清洁区域中移动和工作。但是,自移动机器人在待清洁区域中工作时,可能会出现自移动机器人的移动方向与清洁地图不匹配的情况,会导致清扫效率降低,影响用户体验。
技术实现思路
1、因此,本发明所要解决的技术问题是自移动机器人在待清洁区域中工作时,可能会出现自移动机器人的移动方向与清洁地图不匹配的情况,会导致清扫效率降低,影响用户体验。
2、为解决上述技术问题,本发明提供一种移动方向纠偏方法,应用于自移动机器人,所述方法包括:
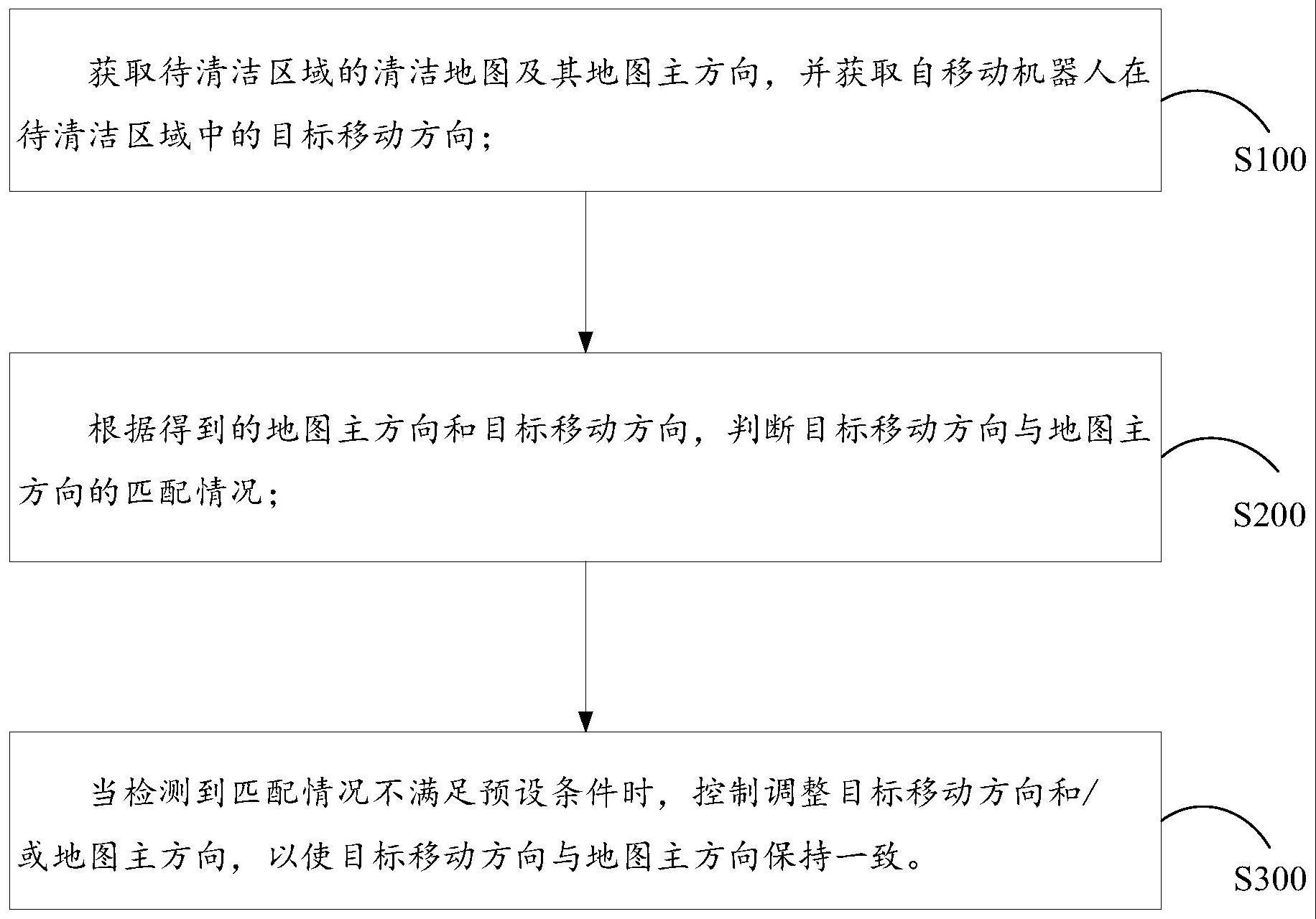
3、获取待清洁区域的清洁地图及其地图主方向,并获取自移动机器人在所述待清洁区域中的目标移动方向;
4、根据得到的所述地图主方向和所述目标移动方向,判断所述目标移动方向与所述地图主方向的匹配情况;
5、当检测到所述匹配情况不满足预设条件时,控制调整所述目标移动方向和/或所述地图主方向,以使所述目标移动方向与所述地图主方向保持一致。
6、可选地,所述获取待清洁区域的清洁地图及其地图主方向,包括:
7、获取待清洁区域的清洁地图;
8、根据得到的所述清洁地图,采用预设算法获取所述清洁地图的目标边界线;其中,所述目标边界线为所述清洁地图的所有的边界线中最长的一条边界线;
9、根据得到的所述目标边界线,确定所述目标边界线的延伸方向为地图主方向。
10、可选地,所述根据得到的所述清洁地图,采用预设算法获取所述清洁地图的目标边界线,包括:
11、根据得到的所述清洁地图,获取所述清洁地图的边界图像;
12、根据得到的所述边界图像,采用霍夫变换算法得到所述清洁地图的目标边界线。
13、可选地,所述根据得到的所述清洁地图,采用预设算法获取所述清洁地图的目标边界线,包括:
14、根据得到的所述清洁地图,获取所述清洁地图的所有边界位置处的边界激光点信息;
15、根据得到的所有边界位置处的所述边界激光点信息,采用最小二乘法将边界激光点拟合形成多条边界线;
16、根据得到的多条所述边界线,获取所述目标边界线。
17、可选地,所述根据得到的多条所述边界线,获取所述目标边界线,包括:
18、根据得到的多条所述边界线,获取多条所述边界线中最长的一条所述边界线,设定最长的一条所述边界线为所述目标边界线。
19、可选地,所述当检测到所述匹配情况不满足预设条件时,控制调整所述目标移动方向和/或所述地图主方向,以使所述目标移动方向与所述地图主方向保持一致,包括:
20、当检测到所述匹配情况不满足预设条件时,根据所述目标移动方向,控制调整所述清洁地图的所述地图主方向,得到所述清洁地图的新地图主方向;
21、控制所述新地图主方向与所述目标移动方向平行或重合,以使得所述新地图主方向与所述目标移动方向保持一致;或/和,
22、当检测到所述匹配情况不满足预设条件时,控制所述自移动机器人向所述地图主方向旋转预设角度,得到所述自移动机器人的新目标移动方向;
23、控制所述新目标移动方向与所述清洁地图的所述地图主方向平行或重合,以使得所述地图主方向与所述新目标移动方向保持一致。
24、可选地,所述控制所述新目标移动方向与所述清洁地图的所述地图主方向平行或重合,以使得所述地图主方向与所述新目标移动方向保持一致,包括:
25、根据得到的所述自移动机器人旋转所述预设角度后得到的新目标移动方向,获取所述待清洁区域在所述新目标移动方向处的目标边界线;
26、当检测到所述目标边界线的延伸方向与所述地图主方向平行或重合时,判断所述新目标移动方向与所述地图主方向保持一致。
27、可选地,所述获取自移动机器人在所述待清洁区域中的目标移动方向,包括:
28、获取所述自移动机器人在所述待清洁区域中的初始移动方向,并确定所述初始移动方向为所述目标移动方向。
29、此外,本发明还提出一种移动方向纠偏系统,应用于自移动机器人,包括:
30、方向获取模块,用于获取待清洁区域的清洁地图及其地图主方向,并获取自移动机器人在所述待清洁区域中的目标移动方向;
31、方向匹配检测模块,用于根据得到的所述地图主方向和所述目标移动方向,判断所述目标移动方向与所述地图主方向的匹配情况;
32、方向控制模块,用于当检测到所述匹配情况不满足预设条件时,控制调整所述目标移动方向和/或所述地图主方向,以使所述目标移动方向与所述地图主方向保持一致。
33、此外,本发明还提出一种自移动机器人,包括:
34、机器人本体;以及,
35、控制处理器,设于所述机器人本体上;
36、其中,所述控制处理器用于:
37、获取待清洁区域的清洁地图及其地图主方向,并获取自移动机器人在所述待清洁区域中的目标移动方向;
38、根据得到的所述地图主方向和所述目标移动方向,判断所述目标移动方向与所述地图主方向的匹配情况;
39、当检测到所述匹配情况不满足预设条件时,控制调整所述目标移动方向和/或所述地图主方向,以使所述目标移动方向与所述地图主方向保持一致。
40、本发明提供的技术方案,具有以下优点:
41、本发明提供的移动方向纠偏方法,在自移动机器人对待清洁区域进行清扫前,可先获取待清洁区域的清洁地图的地图主方向、以及自移动机器人在待清洁区域中的目标移动方向(即初始移动方向),并判断地图主方向与目标移动方向是否匹配,即检测地图主方向与目标移动方向是否一致。如果地图主方向与目标移动方向不一致(即不满足预设条件,出现偏转),则可对目标移动方向和/或地图主方向进行调整,以使目标移动方向与地图主方向保持一致。这样,可在清洁地图的地图主方向相对自移动机器人的目标移动方向出现偏转时,对自移动机器人或/和清洁地图进行纠偏,使机器人最开始行走的方向与地图主方向平行或重合,从而提升清扫效率,提升用户体验。
技术特征:
1.一种移动方向纠偏方法,应用于自移动机器人,其特征在于,所述方法包括:
2.根据权利要求1所述的移动方向纠偏方法,其特征在于,所述获取待清洁区域的清洁地图及其地图主方向,包括:
3.根据权利要求2所述的移动方向纠偏方法,其特征在于,所述根据得到的所述清洁地图,采用预设算法获取所述清洁地图的目标边界线,包括:
4.根据权利要求2所述的移动方向纠偏方法,其特征在于,所述根据得到的所述清洁地图,采用预设算法获取所述清洁地图的目标边界线,包括:
5.根据权利要求4所述的移动方向纠偏方法,其特征在于,所述根据得到的多条所述边界线,获取所述目标边界线,包括:
6.根据权利要求2所述的移动方向纠偏方法,其特征在于,所述当检测到所述匹配情况不满足预设条件时,控制调整所述目标移动方向和/或所述地图主方向,以使所述目标移动方向与所述地图主方向保持一致,包括:
7.根据权利要求6所述的移动方向纠偏方法,其特征在于,所述控制所述新目标移动方向与所述清洁地图的所述地图主方向平行或重合,以使得所述地图主方向与所述新目标移动方向保持一致,包括:
8.根据权利要求1-7任一项所述的移动方向纠偏方法,其特征在于,所述获取自移动机器人在所述待清洁区域中的目标移动方向,包括:
9.一种移动方向纠偏系统,应用于自移动机器人,其特征在于,包括:
10.一种自移动机器人,其特征在于,包括:
技术总结
本发明涉及一种移动方向纠偏方法、系统及自移动机器人。该方法包括:获取待清洁区域的清洁地图及其地图主方向,并获取自移动机器人在所述待清洁区域中的目标移动方向;根据得到的所述地图主方向和所述目标移动方向,判断所述目标移动方向与所述地图主方向的匹配情况;当检测到所述匹配情况不满足预设条件时,控制调整所述目标移动方向和/或所述地图主方向,以使所述目标移动方向与所述地图主方向保持一致。本发明可解决自移动机器人在待清洁区域中工作时,可能会出现自移动机器人的移动方向与清洁地图不匹配的情况,会导致清扫效率降低,影响用户体验的问题。
技术研发人员:曹蒙,张陆涵,王永涛
受保护的技术使用者:追觅创新科技(苏州)有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!