一种医用物资配送方法及系统与流程
本发明涉及物资配送领域,特别是涉及一种医用物资配送方法及系统。
背景技术:
1、随着民众对医疗卫生需求的大幅增加,大部分地区存在医疗服务资源分布不均、医护场所人力不足的现象,亟需大力引入配送机器人缓解医护场所医疗服务资源紧张的问题,解决医护场所配送业务量快速攀升和人力成本持续走高的突出矛盾。但医院环境具有复杂性、动态性、人流量大等特点,这就对医用配送机器人的安全性能、配送效率提出了重大挑战。当前应用到医院场景的配送机器人占比不高,且为了保证配送安全,均以恒定速度进行配送,即只有一种配送模式,配速一般不高于0.5m/s,这种模式会极大影响配送效率,难以发挥配送机器人的价值,更无法达到高要求医用配送机器人水平。
技术实现思路
1、本发明的目的是提供一种医用物资配送方法及系统,可提高医用物资的配送效率及安全性。
2、为实现上述目的,本发明提供了如下方案:
3、一种医用物资配送方法,包括:
4、获取医院内部地形、配送任务指令、配送任务指令的下发时间及配送机器人的当前位置;所述配送任务指令包括配送起点及配送终点;
5、根据所述医院内部地形、所述配送任务指令及所述配送机器人的当前位置进行路径规划,得到规划路径;
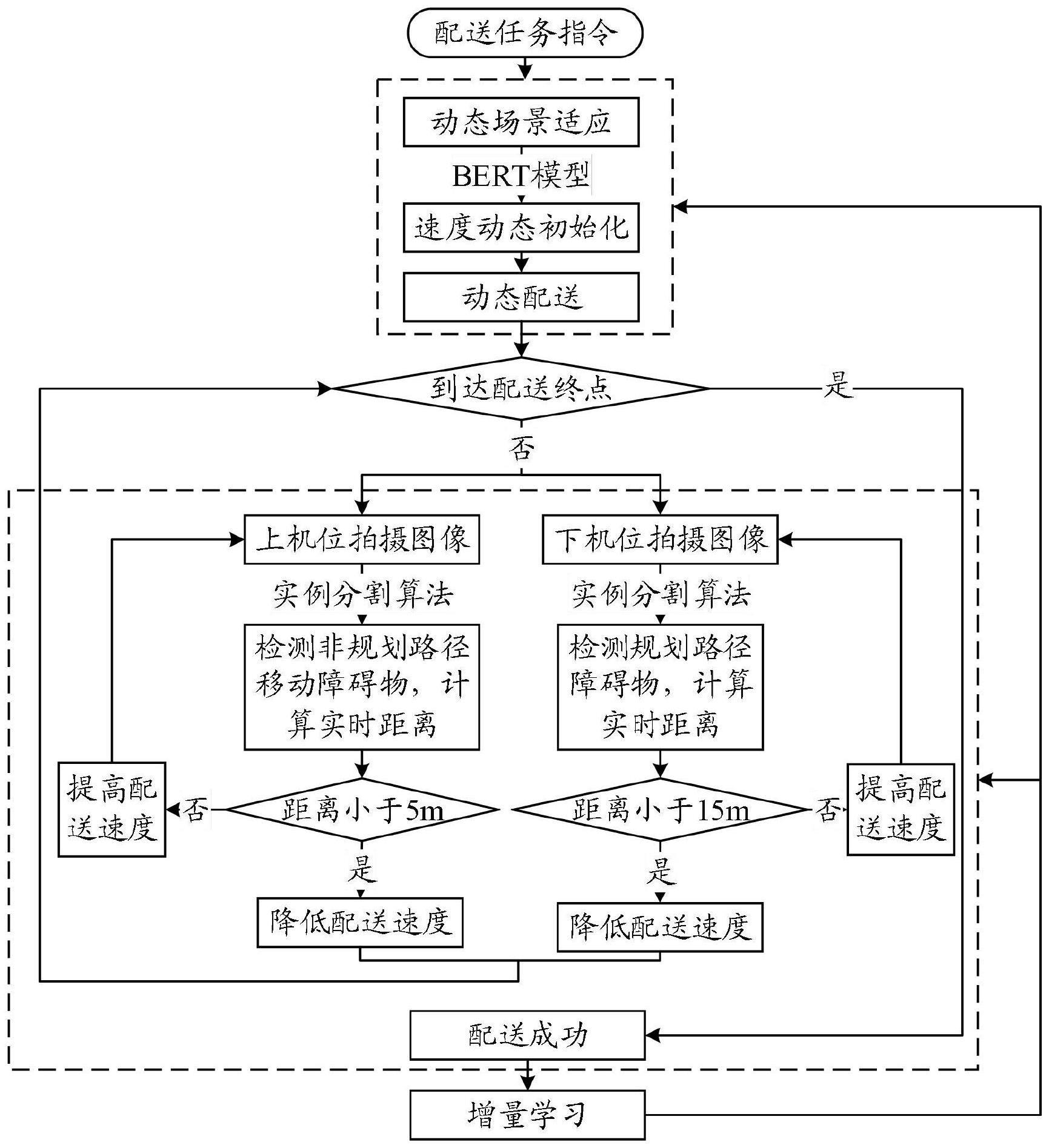
6、根据所述配送任务指令、所述配送任务指令的下发时间及所述配送机器人的当前位置,基于速度适应模型,确定初始配送速度;所述速度适应模型为预先采用训练样本集对bert模型进行训练得到的;所述训练样本集中的训练样本包括历史配送任务指令、历史配送任务指令的下发时间、配送机器人的历史位置、历史配送任务指令的下发时间对应医院内的人流量及历史速度;
7、根据所述初始配送速度,控制所述配送机器人沿所述规划路径运行;
8、判断所述配送机器人是否到达配送终点,若到达配送终点,则配送完成,若未到达配送终点,则采集所述配送机器人的前方图像;
9、根据所述配送机器人的前方图像,确定所述配送机器人与障碍物间的距离;
10、根据所述配送机器人与障碍物间的距离,调整所述配送机器人的运行速度。
11、可选地,所述配送机器人上设置有上机位摄像头及下机位摄像头;所述配送机器人的前方图像包括非规划路径图像及规划路径图像;
12、采集所述配送机器人的前方图像,具体包括:
13、通过上机位摄像头采集非规划路径图像;
14、通过下机位摄像头采集规划路径图像。
15、可选地,所述障碍物包括规划路径上的障碍物及非规划路径上的移动障碍物;
16、根据所述配送机器人的前方图像,确定所述配送机器人与障碍物间的距离,具体包括:
17、获取所述上机位摄像头的像素高度、所述上机位摄像头的焦距、所述下机位摄像头的像素高度及所述下机位摄像头的焦距;
18、根据所述规划路径图像、所述下机位摄像头的像素高度及所述下机位摄像头的焦距,采用实例分割算法,确定所述配送机器人与所述规划路径上障碍物间的距离;
19、根据所述非规划路径图像、所述上机位摄像头的像素高度及所述上机位摄像头的焦距,采用实例分割算法,确定所述配送机器人与移动障碍物间的距离。
20、可选地,采用以下公式,确定所述配送机器人与所述规划路径上障碍物间的距离:
21、
22、
23、其中,dd为所述配送机器人与所述规划路径上障碍物间的距离,fd为下机位摄像头的焦距,hd为障碍物的图像像素高度,hd为障碍物的实际高度,camerad为下机位摄像头的像素高度。
24、可选地,采用以下公式,确定所述配送机器人与所述非规划路径上移动障碍物间的距离:
25、
26、
27、其中,du为所述配送机器人与所述非规划路径上移动障碍物间的距离,fu为上机位摄像头的焦距,hu为移动障碍物的图像像素高度,hu为移动障碍物的实际高度,camerau为上机位摄像头的像素高度。
28、可选地,根据所述配送机器人与障碍物间的距离,调整所述配送机器人的运行速度,具体包括:
29、判断所述配送机器人与所述规划路径上障碍物间的距离是否小于第一设定阈值,若是,则降低所述配送机器人的运行速度,否则,提高所述配送机器人的运行速度;
30、判断所述配送机器人与移动障碍物间的距离是否小于第二设定阈值,若是,则降低所述配送机器人的运行速度,否则,提高所述配送机器人的运行速度。
31、为实现上述目的,本发明还提供了如下方案:
32、一种医用物资配送系统,包括:
33、数据获取模块,用于获取医院内部地形、配送任务指令、配送任务指令的下发时间及配送机器人的当前位置;所述配送任务指令包括配送起点及配送终点;
34、路径规划模块,与所述数据获取模块连接,用于根据所述医院内部地形、所述配送任务指令及所述配送机器人的当前位置进行路径规划,得到规划路径;
35、初始速度确定模块,与所述数据获取模块连接,用于根据所述配送任务指令、所述配送任务指令的下发时间及所述配送机器人的当前位置,基于速度适应模型,确定初始配送速度;所述速度适应模型为预先采用训练样本集对bert模型进行训练得到的;所述训练样本集中的训练样本包括历史配送任务指令、历史配送任务指令的下发时间、配送机器人的历史位置、历史配送任务指令的下发时间对应医院内的人流量及历史速度;
36、第一控制模块,分别与所述路径规划模块及所述初始速度确定模块连接,用于根据所述初始配送速度,控制所述配送机器人沿所述规划路径运行;
37、图像采集模块,用于判断所述配送机器人是否到达配送终点,若到达配送终点,则配送完成,若未到达配送终点,则采集所述配送机器人的前方图像;
38、距离确定模块,与所述图像采集模块连接,用于根据所述配送机器人的前方图像,确定所述配送机器人与障碍物间的距离;
39、第二控制模块,与所述距离确定模块连接,用于根据所述配送机器人与障碍物间的距离,调整所述配送机器人的运行速度。
40、可选地,所述配送机器人的前方图像包括非规划路径图像及规划路径图像;
41、所述图像采集模块包括:
42、上机位摄像头,设置在所述配送机器人上,用于采集非规划路径图像;
43、下机位摄像头,设置在所述配送机器人上,且位于所述上机位摄像头的下方,用于采集规划路径图像。
44、可选地,所述图像采集模块以s/次的频率采集所述配送机器人的前方图像,v为配送机器人的运行速度。
45、根据本发明提供的具体实施例,本发明公开了以下技术效果:
46、本发明将配送任务指令的下发时间及配送机器人的当前位置输入速度适应模型,确定对应场景下配送机器人的初始配送速度,能够自适应确定配送机器人的初始运行速度。配送机器人运行的过程中,通过前方图像判断配送机器人与障碍物间的距离,进一步自适应调整配送机器人的运行速度,极大降低配送机器人与障碍物发生碰撞的几率,本发明提高了医用物资的配送效率及安全性。
- 还没有人留言评论。精彩留言会获得点赞!