一种人在回路的无人直升机飞行仿真系统和方法与流程
1.本发明涉及一种人在回路的无人直升机飞行仿真系统和方法。
背景技术:
2.本发明涉及无人直升机系统飞行仿真技术领域,尤其针对人在回路的无人直升机飞行仿真方面。当前的无人直升机不仅搭载了昂贵的机载设备,还配置了大量的机载功能软件,技术复杂度提升了一个数量级,但技术成熟度低,新设备、新软件又相对过于依赖频繁的飞行试验来开展测试和验证,导致事故率居高不下,系统的研制风险较高。视景仿真技术也越来越普及,成本越来越低,试验人员可通过在虚拟空间复现三维图像,并结合叠加的二维曲线信息,实时观察三维场景中的无人直升机飞行姿态和轨迹,凭借直观、高效、快捷观测敏感数据的能力,能直观地判定飞行品质的优劣。采用视景仿真技术和和半实物仿真技术的结合,可以大大提高无人直升机仿真试验的逼真度和有效性,最大程度地减少空中试飞架次,尽早发现设备隐患和软件缺陷,能够将损失降低到最低,同时还能够促进型号研制进度。
3.现有技术中,或是仅对接口进行仿真,或是传感器特性模拟不够全面、或是未能有效结合无人直升机飞行动力学模型特性,飞行仿真模拟逼真程度有限,未实现人在回路的飞行控制在线优化,未能提供完整的人在回路的无人直升机飞行仿真、实操训练功能;或是仅从时域角度仿真,未能够通过仿真数据分析出人在回路的无人直升机飞控系统频域性能指标。
技术实现要素:
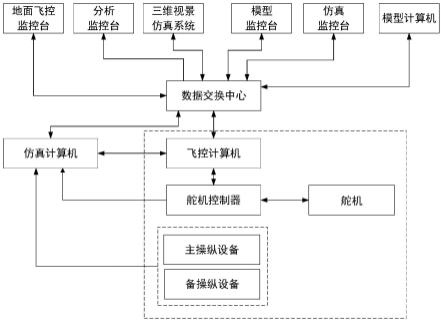
4.发明目的:本发明的目的在于提出一种人在回路的无人直升机飞行仿真系统,包括模型计算机、地面飞控监控台、分析监控台、仿真监控台、模型监控台、仿真计算机、三维视景仿真系统、数据交换中心,并集成无人直升机实装主备操纵设备、飞控计算机、舵机和舵机控制器、及相对应软件系统;
5.所述地面飞控监控台与飞控计算机通信,能够发送飞行控制指令,并接收飞控计算机下传遥测数据并实时显示;
6.所述模型监控台、仿真监控台分别用于对模型计算机运行状态进行监控、仿真计算机运行状态进行监控;
7.所述分析监控台用于对仿真数据进行分析,包括绘制时域响应曲线和频率响应曲线,并能够计算时域和频域飞行性能;
8.所述三维视景仿真系统内部嵌入目标区域场景,与模型计算机通信,获取无人直升机状态数据用于驱动直升机飞行状态三维显示;
9.所述模型计算机实时运行无人直升机飞行动力学模型,接收仿真计算机发送的舵机位置信息,将解算后的无人直升机飞行状态信息反馈给仿真计算机,同时发送给三维视景仿真系统,下传无人直升机飞行动力学模型运行状态信息至模型监控台;
10.所述仿真计算机运行传感器仿真软件,仿真软件的各模拟传感器通过串口按照通信协议将各模拟传感器报文数据发送至飞控计算机;接收主备操纵设备的操纵杆量信息,作为飞控计算机控制输入;接收舵控发送的舵机位置信息,解算并转换成控制输出量并反馈给模型计算机并接收其发送的无人直升机飞行状态信息;与仿真监控台通信,实现设备状态监控与故障注入功能;
11.所述数据交换中心连接地面飞控监控台、分析监控台、仿真监控台、模型监控台、模型计算机、仿真计算机和飞控计算机,实现信息交互。
12.所述飞控计算机、舵机和舵机控制器和主备操纵设备硬件采用无人直升机实装设备,确保飞控软件运行环境和无人直升机机载环境一致,以保证飞行仿真的逼真度。
13.操纵人员始终处于无人直升机机载飞控计算机、舵机和舵机控制器、仿真计算机、模型计算机和地面飞控监控台回路中间,起到串联所有仿真环节、控制和监视整个仿真进程,和无人直升机实际飞行操纵过程人的角色和作用一致。
14.所述仿真监控台能够模拟组合导航、卫星导航、气压计、空速表、航向计传感器故障注入,故障类型包括通信故障、帧头异常、校验错误、字节错误、数据卡死。
15.所述分析监控台用于计算典型时域性能指标和频域指标,所述典型时域性能指标包括调节时间、超调量;所述频域指标包括带宽、幅值裕度、相角裕度。
16.设计人员通过地面飞控监控台、模型仿真监控台发送控制指令至飞控计算机,实时监控无人直升机飞行状态并利用分析监控台绘制时域直升机飞行状态时域响应曲线和频率响应曲线,给出飞行品质计算结果,利用地面飞控监控台在线调节控制参数。
17.本发明还提供了一种人在回路的无人直升机飞行仿真方法,包括无人直升机悬停状态下在线优化控制参数飞行仿真、无人直升机传感器故障模拟仿真和无人直升机模拟扫频飞行试验所述无人直升机悬停状态下在线优化控制参数飞行仿真包括如下步骤:
18.步骤a1,无人直升机飞行仿真系统上电、启动仿真;
19.步骤a2,操纵无人直升机处于悬停状态;
20.步骤a3,通过地面飞控监控台、模型监控台监控无人直升机飞行状态;
21.步骤a4,通过地面飞控监控台注入各操纵通道阶跃信号和扫频信号指令;
22.步骤a5,通过地面飞控监控台监控无人直升机飞行状态响应;
23.步骤a6,通过分析监控台获取飞行状态数据、绘制时域响应曲线与频率响应曲线、计算调节时间、超调量与带宽并与飞行品质规范对比;
24.步骤a7,通过飞控监控调节控制律参数;
25.步骤a8,迭代进行步骤a4~步骤a7,直至满足指标要求。
26.所述无人直升机传感器故障模拟仿真包括如下步骤:
27.步骤b1,无人直升机飞行仿真系统上电、启动仿真;
28.步骤b2,操纵无人直升机处于增稳状态或者悬停内控飞行模态下;
29.步骤b3,三维视景仿真系统实时接收无人直升机模型状态数据,并实时显示无人直升机位置、速度、姿态信息;
30.步骤b4,无人直升机操纵手通过三维视景仿真系统观察无人直升机飞行状态;
31.步骤b5,通过仿真监控台注入组合导航传感器通信故障;
32.步骤b6,无人直升机飞行仿真系统自动切换至备份导航传感器;
33.步骤b7,无人直升机操纵手操纵无人直升机降落并回收。
34.所述无人直升机模拟扫频飞行试验包括如下步骤:
35.步骤c1,无人直升机飞行仿真系统上电、启动仿真;
36.步骤c2,外操纵手操纵无人直升机处于增稳状态并保持姿态平稳;
37.步骤c3,三维视景仿真系统实时接收无人直升机模型状态数据,并实时显示无人直升机位置、速度、姿态信息,设置视角为地面操纵手视角;
38.步骤c4,无人直升机外操纵手通过三维视景仿真系统观察无人直升机飞行状态,并根据设计的扫频激励信号依次叠加到各通道操纵输入上;
39.步骤c5,无人直升机内操纵手实时观察地面飞控监控台在扫频过程中的姿态振荡曲线,判定是否在预定的安全范围内,并判定是否偏离配平姿态给出报警提示、给出扫频信号的时间分配提示;
40.步骤c6,无人直升机外操纵手结合内操纵手给出的提示信息修正扫频激励信号,在扫频结束后继续保持配平稳定飞行后再注入时域偶极子校验信号;
41.步骤b7,无人直升机操纵手操纵无人直升机降落并回收。
42.设计人员通过地面飞控监控台、模型仿真监控台发送控制指令至飞控计算机,实时监控无人直升机飞行状态并利用分析监控台绘制时域直升机主要飞行状态时域响应曲线和频率响应曲线,给出飞行品质计算结果,利用地面飞控监控台在线调节控制参数;
43.主备操纵设备具备实时切换功能,具备可扩展性;仿真计算机模拟各传感器接口特性、动态特性,仿真监控台实时监控传感器运行状态,视景仿真系统嵌入目标区域场景,实时显示无人直升机三维空间飞行轨迹和姿态,通过仿真监控台注入各传感器故障模式与测量噪声,实现无人直升机操纵手在常规以及故障模式下飞行仿真和实操训练;
44.地面飞控监控台、模型仿真监控台发送的控制指令包括:位置指令、速度指令、姿态指令、变距指令、控制律参数、扰动信号指令,指令的形式包括阶跃信号、方波信号、斜坡信号、三角波信号、正弦信号、扫频信号等;
45.分析监控台给出飞行品质计算包括:通过绘制时域响应曲线求取超调量、调节时间、上升时间、平均值、极值、稳态误差等时域指标;包括:通过绘制频率响应曲线给出带宽、幅值裕度和相角裕度。
46.有益效果:设计人员能够通过本发明系统和方法,在线优化控制参数、验证飞行控制逻辑、降低无人直升机飞行控制系统设计开发成本、降低飞控试验飞行风险、缩短飞行试验周期;满足无人直升机操纵手飞行仿真与实操训练需求;具有较强的工程应用价值。
附图说明
47.下面结合附图和具体实施方式对本发明做更进一步的具体说明,本发明的上述或其他方面的优点将会变得更加清楚。
48.图1为人在回路无人直升机半实物仿真系统结构示意图。
49.图2为人在回路在线优化控制参数仿真试验流程图。
50.图3为无人直升机操纵手增稳飞行仿真算法示意图。
51.图4是无人直升机模拟扫频飞行试验示意图。
具体实施方式
52.下面结合附图及实施例对本发明做进一步说明。
53.如图1所示,本发明提供了一种人在回路的无人直升机飞行仿真系统和方法,系统结构如图1所示。
54.地面飞控等各监控台统一采用4u工控机形式,硬件配置为处理器不低于intel i7、主频不小于2.0g,内存不低于8g、硬盘不小于512g,串口不少于4个,每台主机配置22英寸宽屏显示器。
55.地面飞控监控台通过串口与飞控计算机通信,可发送控制指令、操纵变距、控制参数、扰动信号等遥控信息,并接收飞控下传的包含无人直升机空间位置、前向/侧向和垂向三轴速度、俯仰角/横滚角和偏航角及其对应的角速度、操纵变距、各传感器数据等组成的遥测数据并实时显示。
56.模型监控台用于与模型计算机进行通信,模型监控软件主要接收无人直升机飞行动力学模型的主要变量(三轴姿态角速度、角度信息和三轴速度)和五通道控制变量(纵横向周期变距、总距、尾桨距和油门变距)数据,对收到的飞行动力学模型状态数据进行解析、保存并显示。
57.仿真监控台用于监控仿真计算机运行状态,可进行监控各模拟传感器的设备工作状态,模拟组合导航、卫星导航、气压计、空速表、航向计等传感器故障注入,故障类型包括通信故障、帧头异常、校验错误、字节错误、数据卡死等;
58.分析监控台上运行数据分析软件,用于对仿真数据进行分析、存储、数据曲线和文本显示,包括绘制时域响应曲线和频率响应曲线,计算调节时间、超调量等典型时域性能指标以及带宽、幅值裕度、相角裕度等频域指标。对于调节时间和超调量,可以直接从分析软件采集到的时域响应曲线上得出,调节时间取阶跃响应到达并保持在终值
±
5%以内所需最短时间,超调量σ%取响应峰值h(t
p
)超出终值h(∞)的百分比,如下式;
[0059][0060]
对于频域指标如带宽、幅值裕度、相角裕度,首先将仿真数据进行加窗滤波,窗口尺寸选择根据多次仿真试验经验,一般选择周期如下式,t
win
为加窗周期,ω
max
为最大感兴趣频率,t
rec
为数据记录的长度。
[0061][0062]
再对加窗滤波后的数据进行频率响应计算,得到频率响应曲线,在该曲线上找到0频率点的幅值响应m(0)衰减到0.707m(0)点对应的频率值即为带宽,幅值裕度为相位曲线上相角交界频率ωg处对应的幅值与0db的距离,相角裕度为幅值曲线上截止频率ωc处对应的相角与-180
°
水平线之间的角度差。
[0063]
数据交换中心一般采用以太网交换机方式实现,可采用16口以上、千兆以上速度交换机,用于连接各仿真设备和仿真监控台计算机。
[0064]
三维视景仿真系统内部嵌入目标区域场景,主要通过数据交换中心与模型计算机通信,获取无人直升机的位置、速度、姿态等状态数据用于驱动直升机飞行状态三维显示,
可在仿真过程中切换地面操纵手视角和无人直升机跟随视角;
[0065]
模型计算机以5毫秒定时周期解算无人直升机飞行动力学模型,通过网络接收仿真计算机发送的舵机位置信息,将解算后直升机飞行状态信息,包括三轴姿态角及角速度、三轴机体速度、高度、位置、加速度等,通过网络方式反馈给仿真计算机,同时发送给视景计算机,通过网络通信方式下传模型运行状态信息至模型监控台;模型监控软件能够显示无人直升机模型状态信息、具备人工操控、故障注入功能。
[0066]
仿真计算机运行传感器仿真软件,主要模拟无人直升机机载组合导航、卫星导航、气压计、空速表、航向计传感器,各模拟传感器通过共享内存方式实现模拟传感器间数据共享,再通过串口按照通信协议将数据发送至飞控计算机通过网口与模型计算机通信通过网口与仿真监控台进行通信,实现设备状态监控与故障注入等功能接收舵控发送的舵机位置信息,解算并转换成控制输出量用于模型解算。接收主备操纵设备的操纵杆量信息,并通过串口发送给飞控计算机作为控制输入。
[0067]
本仿真系统的飞控计算机即实装飞控计算机,舵系统即实装舵系统。地面飞控监控台运行实装测控软件,直接用串行通信线模拟数据链,实现和飞控计算机的通信。本仿真系统使用的主备操纵设备也与实装完全一致。
[0068]
飞控计算机主要由飞控计算机硬件和飞行控制软件组成。通过i/o接口与仿真传感器进行通信,各仿真传感器通信协议与实际设备完全相同。通过串口接收地面飞控监控台指令以及发送当前直升机飞行状态与设备运行状态等信息。通过串口与舵系统通信,接收舵系统反馈状态以及发送飞行控制解算的舵机设定。
[0069]
舵系统主要由舵机控制器、实物舵机等部分组成。舵系统作为执行机构主要负责接收飞控计算机输出的舵机设定,驱动舵机动作并将舵机实际位置信息发送仿真计算机用于模型计算机飞行动力学模型解算。
[0070]
实施例1:直升机悬停状态下在线优化控制参数飞行仿真
[0071]
直升机悬停状态下在线优化控制参数飞行仿真主要步骤如下:
[0072]
步骤a1,系统上电、启动仿真;
[0073]
步骤a2,操纵无人直升机处于悬停状态;
[0074]
步骤a3,通过地面飞控监控台、模型监控台监控无人直升机飞行状态;
[0075]
步骤a4,通过地面飞控监控台先后注入各操纵通道指阶跃信号指令和扫频激励指令;
[0076]
步骤a5,通过地面飞控监控台监控无人直升机飞行状态响应及其与飞控设定曲线的对比,通过模型监控台监控无人直升机姿态响应曲线;
[0077]
步骤a6,通过分析监控台获取飞行状态数据、绘制时域响应曲线与频率响应曲线、计算调节时间、超调量与带宽等性能指标;
[0078]
步骤a7,通过飞控调参指令调节控制律参数;
[0079]
步骤a8,迭代进行仿真步骤a4~步骤a7,直至满足指标要求,一般调节时间跟随无人直升机通道相关,超调量σ%一般取10%,带宽和无人直升机的操纵通道和任务科目相关,一般目标捕获及跟踪任务要求偏高,纵向俯仰角度控制的等级1的带宽要求2.0rad/s以上频率,横滚角度控制的等级1带宽为2.5rad/s以上,偏航角度控制为3.5rad/s以上,幅值裕度一般大于6db,相角裕度一般不低于45
°
。
[0080]
试验方法步骤见图2。
[0081]
实施例2:无人直升机传感器故障模拟仿真试验
[0082]
无人直升机操纵手控制无人直升机增稳飞行仿真算法示意图见图3,仿真方法主要步骤如下:
[0083]
步骤b1,系统上电、启动仿真;
[0084]
步骤b2,外操纵手操纵无人直升机处于增稳状态;
[0085]
步骤b3,三维视景仿真系统实时接收无人直升机模型状态数据,并实时显示直升机位置、速度、姿态信息;
[0086]
步骤b4,无人直升机操纵手通过三维视景仿真系统观察无人直升机飞行状态;
[0087]
步骤b5,通过仿真监控台传感器故障注入界面注入组合导航传感器通信故障;
[0088]
步骤b6,飞控软件自动切换至备份导航传感器,通过地面飞控监控台的传感器使用状态看出当前飞控软件使用的备份导航传感器;
[0089]
步骤b7,无人直升机操纵手操纵无人直升机降落并回收。
[0090]
实施例3:所述无人直升机模拟扫频飞行试验示意图见图4,仿真方法主要步骤如下:
[0091]
步骤c1,无人直升机飞行仿真系统上电、启动仿真;
[0092]
步骤c2,外操纵手操纵无人直升机处于增稳状态并保持姿态平稳,俯仰和横滚姿态处于配平状态;
[0093]
步骤c3,三维视景仿真系统实时接收无人直升机模型状态数据,并实时显示无人直升机位置、速度、姿态信息,设置视角为地面操纵手视角;
[0094]
步骤c4,无人直升机外操纵手通过三维视景仿真系统观察无人直升机飞行状态,并根据设计的扫频激励信号依次叠加到各通道操纵输入上;
[0095]
步骤c5,无人直升机内操纵手实时观察地面飞控监控台在扫频过程中的姿态振荡曲线,是否在监控软件上给出安全边界的范围内,安全边界对于不同的通道有不同的定义,例如本例的无人直升机俯仰姿态定义为
±
10
°
,横滚姿态为
±
15
°
,偏航角度为
±
20
°
,垂速为
±
1m/s,并是否偏离配平姿态给出报警提示、给出扫频信号的时间分配提示,一般一组扫频信号的周期为90s以内;
[0096]
步骤c6,无人直升机外操纵手结合内操纵手给出的提示信息修正扫频激励信号,在扫频结束后继续保持配平稳定飞行后再注入时域偶极子校验信号,该信号一般幅值为整个操纵信号全行程的
±
5%,上升和下降时间0.5s,中间平衡状态需要2s,一个周期共需6s时间。
[0097]
步骤c7,无人直升机操纵手操纵无人直升机降落并回收。
[0098]
本发明提供了一种人在回路的无人直升机飞行仿真系统和方法,具体实现该技术方案的方法和途径很多,以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。本实施例中未明确的各组成部分均可用现有技术加以实现。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1