基于神经网络间接估计的水下航行器动力学黑盒建模方法
本发明涉及一类水下航行器,特别是涉及一类基于神经网络间接估计的水下航行器动力学黑盒建模方法。
背景技术:
1、水下航行器的动力学建模问题是利用机理分析或者数值逼近的方式,求解一个描述动力学特性的数学函数,此函数的输入输出特性与原水下航行器一致。具体的说,对于一类时不变非线性系统,其某时刻的系统状态为任意合法值s(t),输入的控制量为a(t),下一个时刻的状态为s(t+1),那么动力学建模就是求解一个逼近函数f(s(t),a(t))尽可能接近s(t+1)。这样的动力学模型可以应用于水下航行器实际航行过程中的状态预报,为机器学习类的控制算法提供训练数据等用途。
2、水下航行器的动力学建模方法一般可以分为机理建模方法和黑盒建模方法。
3、1.机理建模
4、传统的机理建模方法通常是基于auv的动态模型,因此,大部分研究致力于通过建立更精确的auv动态模型来提升状态估计的精度。
5、线性建模方法的主要思路是搭建数学模型以描述水下航行器动力学建模系统,其难点在于选择合理的表达式,利用线性理论或牛顿-欧拉方程创建的动力学模型都是基于参数化模型的。然而,想要获取精确的水动力参数存在一定复杂度。通过试验或数值计算等方法,完成大量的操纵性模型实验,可以确定水下航行器的动力学模型相关参数。这就势必需要投入大量的时间和资金成本。并且所建立的模型通常也只适用于一些特定的操纵运动,且不具备实时在线修正功能,具有一定的局限性。
6、由于auv的运动模型是非线性的,因此线性的估计方法通常只能工作在很小的范围内。为了解决这一问题,采用非线性的状态估计方法,例如采用基于动态模型的黑盒模型以提升估计性能,通过流体动力学计算获取更为精确的流体动力学因数从而构建性能更优的黑盒模型等方法。但非线性的估计方法仍依赖精确的auv动态模型,这就大大限制了其在实际情况下的应用。
7、2.黑盒建模方法
8、黑盒建模方法主要是基于数据驱动的思想,构造一类具备无限逼近性能的通用动力学模型,通过输出输入的参数训练,使得求解的动力学模型与原模型的特性一致。
9、人工智能方法的出现,为克服上述困难提供了一种有效途径。为精确描述水下航行器的非线性动力学特性,通过智能算法建立一个同动力学模型等价的非线性映射函数,该非线性函数内的参数不具有物理意义,只是数学意义上的等价关系,这种建模方法即为非线性动力学辨识建模,也即黑盒建模方法。
10、该方法的显著优点在于所建立的数学模型仅与系统输入和输出有关,不用考虑模型的真实动力学特性,这就避免了机理建模中的水动力参数的获取,而且可以顾及在机理建模中被忽略的高阶小量,因此,黑盒建模的精度通常较机理建模要高。
11、人工神经网络经过多年的发展和应用,被认为是一种更有效的人工智能算法,在非线性动力学辨识建模方面得到了广泛的应用,被认为是一种非常有效的算法,被广泛应用于几乎所有领域。它的一般结构包括输入层、隐含层和输出层3部分,隐含层可设置一个或多个,其中隐含层的不同结构以及所选择的不同激活函数便形成了不同的人工神经网络算法,常用的包括bp(back propagation)神经网络、径向基函数(radial basis function,rbf)神经网络、hop-field神经网络等。人工神经网络对非线性函数具有良好的拟合能力,为水下航行器的非线性动力学辨识提供了一种有效手段。
12、3.基于神经网络的黑箱建模方法
13、由于人工神经网络具有良好的非线性映射能力、自学习适应能力和并行信息处理能力,为解决未知不确定非线性系统的辨识问题提供了一条新的思路。人工神经网络对非线性函数具有良好的拟合能力,为水下航行器的非线性动力学辨识提供了一种有效手段。
14、采用神经网络方法比较突出的特点:
15、(1)泛化能力
16、对没有训练过的样本,有很好的预测能力和控制能力。特别是,当存在一些有噪声的样本时,具备很好的预测能力,即泛化能力;
17、(2)非线性映射能力
18、当对系统较明确,相关参数获取较直接时,则利用数值分析、偏微分方程等数学工具建立精确的数学模型,但当对系统很复杂、系统未知或者系统信息量很少,建立精确的数学模型很困难时,神经网络的非线性映射能力则表现出优势,因为它不需要对系统进行透彻的了解,但是同时能达到输入与输出的映射关系,这就大大简化了设计的难度。
19、采用神经网络方法对水下航行器进行动力学建模的难点:
20、(1)水下航行器是一个六自由度的强耦合欠驱动系统,需要学习训练的状态非常庞大,而水下实验的成本较高,原始数据较为珍贵,直接用原始数据进行模型训练是十分困难的;
21、(2)水下航行器的流体动力学特性受航速影响大,实际航行实验收集所有航速下的航行数据是不现实的。
技术实现思路
1、本发明的目的在于,克服由于水下航行器系统模型是强耦合非线性系统,为了提高水下航行器控制器的估计精度,但针对水下航行器系统训练需要经验数据庞大的问题,本发明拟采用具有无限逼近能力的神经网络进行这一黑盒模型的回归训练。
2、为了在尽量少的数据需求下训练得到高精度的神经网络黑盒模型,本发明将水下航行器的一些较为明确的机理特性和神经网络技术结合,建立水下航行器的动力学模型,同时能够根据航行过程的历史经验数据,实现实时在线的模型参数微调,为航行过程提供准确的状态预报,从而提供一种基于神经网络间接估计的水下航行器动力学黑盒建模方法。
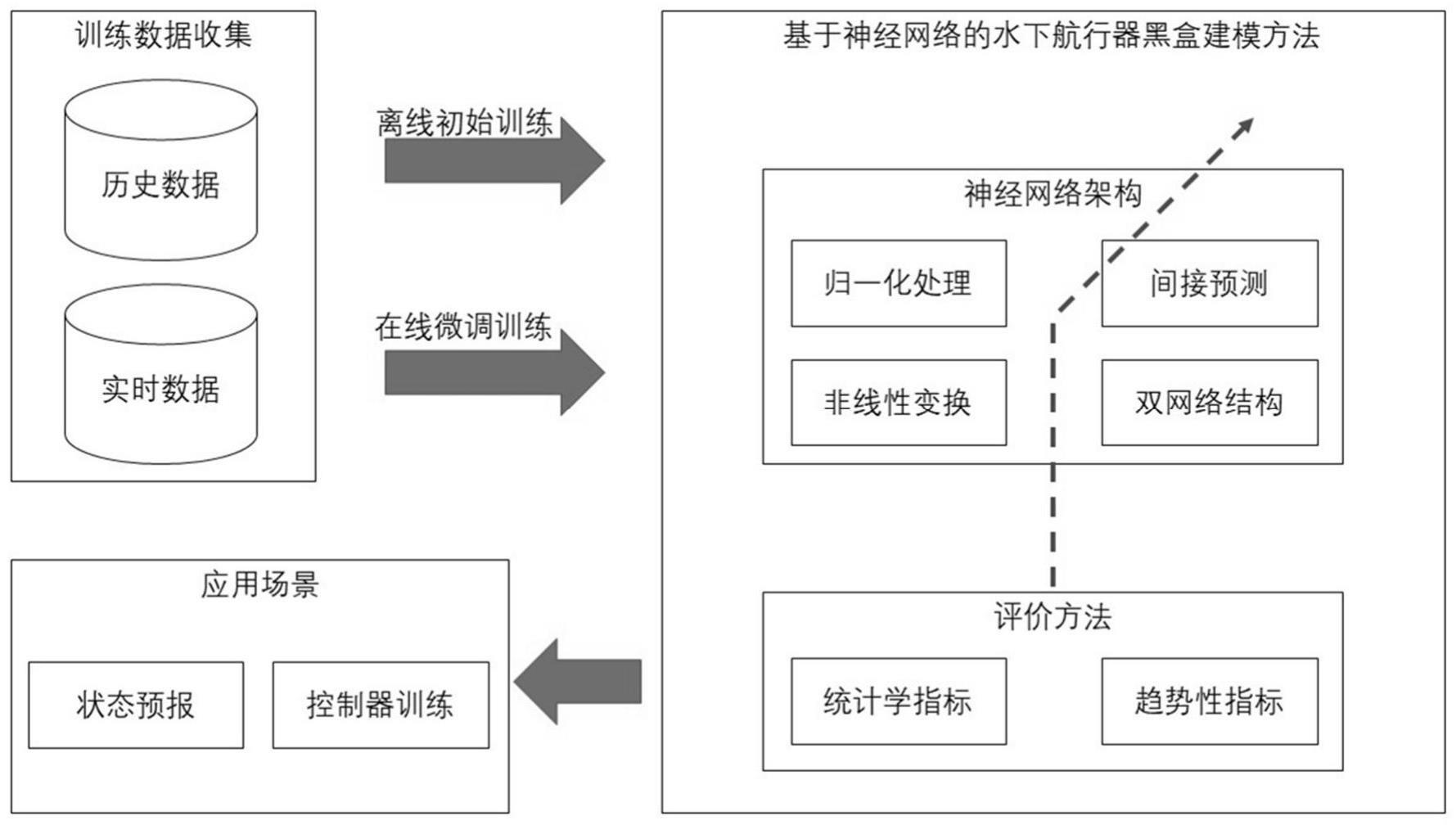
3、为解决上述技术问题,本发明的技术方案提供了一种基于神经网络间接估计的水下航行器动力学黑盒建模方法,所述建模方法包括以下步骤:
4、首先,数据收集与预处理:收集水下航行器auv的参考模型或者真实数据,经过归一化和非线性变换处理,计算历史状态信息,形成数据集;
5、其次,黑盒模型结构设计:根据水下航行器特性设计双神经网络结构的黑盒模型,所述黑盒模型的输入为航行器的当前状态s(t)和控制量a(t),输出为未来的状态变化量δs(t),通过δs(t)和s(t)计算下一时刻的状态估计值
6、接着,黑盒模型回归训练:根据数据集信息和状态估计值的差异,通过设计的算法逐步修正双神经网络结构的黑盒模型的参数;
7、最后,黑盒模型性能评估与筛选:通过设计的统计性能指标和趋势性能指标,对黑盒模型的精度和准确性进行评估,筛选符合需求的黑盒模型参数;
8、所述建模方法在对黑盒模型进行回归训练时,具体包括以下步骤:
9、(1)初始化数据集为训练集和测试集,初始化神经网络权值;
10、(2)从训练集随机采样一批数据,对数据进行归一化和非线性变换处理;
11、(3)进行神经网络的前向计算,得到状态变化量;
12、(4)计算黑盒模型的状态估计值;
13、(5)计算状态估计值与训练集数据的偏差;
14、(6)进行神经网络的偏差的反向传播计算,修正神经网络的参数;
15、(7)重复步骤(2)-(6)直到偏差小于设置的阈值;
16、(8)根据设计的统计性能指标和趋势性能指标,在测试集中评估训练的黑盒模型的性能,当评估结果不符合需求时,回到步骤(1);当评估结果符合需求时,输出模型。
17、作为上述技术方案的一种改进,所述auv的参考模型或实际模型,表示为以下方程的形式:
18、s(t+1)=f(s(t),a(t))
19、该方程在输入某一时刻的状态s(t)和控制量a(t)时,输出下一时刻的状态s(t+1),对于auv的参考模型,s(t+1)是机理模型的计算结果;对于auv的实际模型,s(t+1)是传感器测量的结果;
20、其中,auv的状态主要包括以下各项:
21、
22、其中,[x0,y0,z0]代表auv的浮心相对于惯性坐标系的位置;其姿态角,即横滚角俯仰角θ以及偏航角ψ,表征载体坐标系与惯性坐标系的旋转关系;[vx,vy,vz]和[ωx,ωy,ωz]分别是auv在载体坐标系的三轴线速度和角速度;惯性坐标系固结于空间中的指定位置,以北向、天向、东向为正方向,载体坐标系固结于auv的浮心ob,以auv的轴向、上方向、右侧向为正方向;所受控制量a(t)=[δe(t),δr(t),δd(t),t],其中δe,δr,δd分别是水平舵角,垂直舵角和差分舵角,t是auv所受的额定推力。
23、作为上述技术方案的另一种改进,所述建模方法建立的黑盒模型在计算下一时刻的状态估计值时,通过神经网络估计的状态增量δs(t)间接估计此时,对下一时刻的状态的估计值表示为
24、作为上述技术方案的又一种改进,所述建模方法在训练过程中,对输入特征中的控制量a(t)进行非线性变换得到非线性控制量a′,即a′=a(t)v2,其中,v2=||[vx,vy,vz]|2。
25、作为上述技术方案的再一种改进,所述建模方法在训练过程中,对神经网络的输入和输出数据同时进行了归一化处理。
26、作为上述技术方案的更一种改进,所述建模方法构建具有姿态网络和速度网络双网络结构的估计器,其姿态网络和速度网络的计算公式为:
27、z1=ftanh((w(0))t[s,a])
28、z2=frelu((w(1))tz1)
29、z3=frelu((w(2))tz2)
30、z=ftanh((w(3))tz3)
31、其中,z是神经网络输出层输出值,z1是输入层输出值,z2是第一层隐藏层输出值,z3是第二层隐藏层输出值,w(0)是输入层神经网络权值,w(1)是第一层神经网络权值,w(2)是第二层神经网络权值,w(3)是是第三层神经网络权值;[s,a]为输入值,包括状态量s和控制量a;
32、神经网络激活函数ftanh(x)的表达式为:
33、
34、神经网络激活函数frelu(x)的表达式为:
35、
36、对于姿态网络,其输出其中,δy0是auv深度y0的实际值与估计值的跟踪误差,δθ、δψ分别是横滚角俯仰角θ以及偏航角ψ的实际值与估计值的跟踪误差,[δωx,δωy,δωz]是角速度[ωx,ωy,ωz]的实际值与估计值的跟踪误差;而对于速度网络,其输出z=[δvx,δvy,δvz],其中,[δvx,δvy,δvz]是x,y,z方向上线速度[vx,vy,vz]的实际值与估计值的跟踪误差;
37、同时,其梯度的反向传播公式为:
38、δ4=δz⊙f′tanh((w(3))tz3)
39、δ3=((w(4))tδ4)⊙f′relu((w(2))tz2)
40、δ2=((w(3))tδ3)⊙f′relu((w(1))tz1)
41、δ1=((w(2))tδ2)⊙f′tanh((w(0))t[s,a])
42、
43、(i=2,3,4,z0=[s,a])
44、其中,δ1、δ2、δ3、δ4是误差在逐层方向传播的中间变量,是相应层相应神经元的误差传播的中间变量,zl为标签值,δz=z-zl,j为损失函数,⊙为哈达玛积,是神经网络权值,是相应层相应神经元的神经网络的前向计算的中间值;
45、f′tanh(x)是ftanh(x)的反向传播梯度公式,具体表达式为:
46、
47、f′relu(x)是frelu(x)的反向传播梯度公式,具体表达式为:
48、
49、作为上述技术方案的还一种改进,所述建模方法提出的统计性能指标spi是根据各个被估计状态项的估计值与标签值之间的相对误差得到的统计结果,标签值是与估计值对应的设定的实际值,统计对象是与标签值的相对误差大于所设门限的估计器的输出值,该输出值被称为离群值;spi的计算公式为:
50、
51、其中,m为状态项数(当只针对某一状态计算时,m=1),n为从数据集中抽取的用于测试的数据量,sie为估计方程输出的对下一时刻状态的估计值,sil为对应被估计状态项的标签值,th为相对误差门限;当只针对某状态进行统计时即为该状态的单项spi,当对所有被估计状态进行统计时即为总体spi,二者对比可以反映估计精度的均衡性。
52、作为上述技术方案的进一步的改进,所述建模方法提出的趋势性能指标tpi是计算其在一定时间内各个状态的控制曲线的时间平均误差,计算公式为:
53、
54、其中,ti为控制时间,m为状态项数,sfi为基于状态估计方程的控制曲线,smi为基于模型的控制曲线;同时为了避免各个状态之间数量级之差的影响,对各状态的控制误差进行了相应的归一化处理。
55、目前针对高速细长体auv的状态估计方法尚且较少,由于运动学特性上的差异,直接将普通的黑盒模型应用在高速auv上会造成实际应用中的性能损失。为了解决这一问题,本发明提出的基于神经网络的间接状态估计黑箱建模方法具有如下特点:
56、1.针对神经网络黑盒模型的改进点包括:
57、(1)间接估计;
58、(2)控制量的非线性变换;
59、(3)训练数据的归一化;
60、(4)双网络结构。
61、2.提出了两种训练效果评价指标
62、为了判断黑盒模型的是否训练完成,本发明设计了两种评价指标:
63、(1)统计性能指标(statistics performance index,spi),用以表征估计器输出的状态估计值与真实值之间的误差情况;
64、(2)趋势性能指标(tendency performance index,tpi),用以表征估计器对auv一个条次航行过程中状态估计值与真实值的整体误差情况。
65、3.进行仿真验证
66、最后,通过设计仿真实验证明了本发明提出的构建和训练神经网络黑盒模型的可行性以及有效性。
67、另外,本发明提出的基于神经网络间接估计的水下航行器动力学黑盒建模方法所需约束条件为:
68、①适用于长细比约为10的细长体水下航行器;
69、②高速航行,航行速度大于15m/s。
70、本发明提出的基于神经网络间接估计的水下航行器动力学黑盒建模方法具有如下优点:
71、(1)不依赖精确的系统机理模型,减少精确动力学参数求解的成本;
72、(2)通过间接估计变化量而非直接估计下一状态,减小了神经网络逼近过程中的搜索空间,降低对训练数据量的要求;
73、(3)结合特定类型的auv的机理信息,根据航速对神经网络的输入状态进行非线性预处理,有效地提升了训练得到的黑盒模型对于变航速航行状态下的自适应能力;
74、(4)在实航过程中可以利用航行数据对模型进行在线训练和微调,提升黑盒模型对于不同环境下的自适应能力;
75、(5)根据特定类型的auv的基本动力学特性,将完整的状态预测分解为姿态环和位置环,有效地提高模型拟合的成功率。
76、本发明涉及水下航行器技术领域,其主要内容涉及水下航行器非线性动力学的辨识建模方法,具体为一种针对细长体水下航行器(automatic underwater vehicle,auv)提出的间接状态估计黑盒建模方法。使用本方法构建的黑盒动力学模型(black-box dynamicmodel),可有效针对auv的欠驱动强耦合的不确定非线性系统,在已知当前时刻auv的状态以及所受控制量的情况下估计出下一时刻的状态。通过间接状态估计算法生成的黑盒模型(black-box model),不仅在统计特性上具有较低误差,而且在动力学趋势特性上与原始模型(original model)具有强一致性。本方法计算结果可为机器学习类控制方法提供大量的训练数据支持,实现即使未精确建模,亦可保证在陌生环境中具有强抗干扰能力的快速平稳控制。
- 还没有人留言评论。精彩留言会获得点赞!