道面检测机器人控制方法、装置、电子设备和存储介质与流程
本发明涉及道面检测,具体涉及一种道面检测机器人控制方法、装置、电子设备和存储介质。
背景技术:
1、在现有技术中,由于进行道面检测的检测设备比较重,需要利用牵引车来实现装载或移动。在对道面进行检测时,需要人工驾驶牵引车将检测设备移动至道面的检测点位置,再进行道面检测。但是,由于牵引车的位置与检测设备的位置存在差异,依靠人工难以确定牵引车将检测设备牵引至检测点时,牵引车所需到达的位置,存在耗费人力、定位不精准等问题。
技术实现思路
1、基于上述研究,本发明实施例提供一种道面检测机器人控制方法、装置、电子设备和存储介质,采用机器人搭载检测设备,分别确定与各检测点对应的机器人本体的目标位置,以控制道面检测机器人运行至各目标位置,并控制检测设备在各目标位置对应的检测点进行道面检测,能够快速、准确的对道面进行检测。
2、本发明的实施例可以通过以下实现:
3、第一方面,本发明实施例提供一种道面检测机器人控制方法,用于道面检测机器人的道面检测,所述道面检测机器人包括相互连接的机器人本体以及检测设备,所述方法包括:
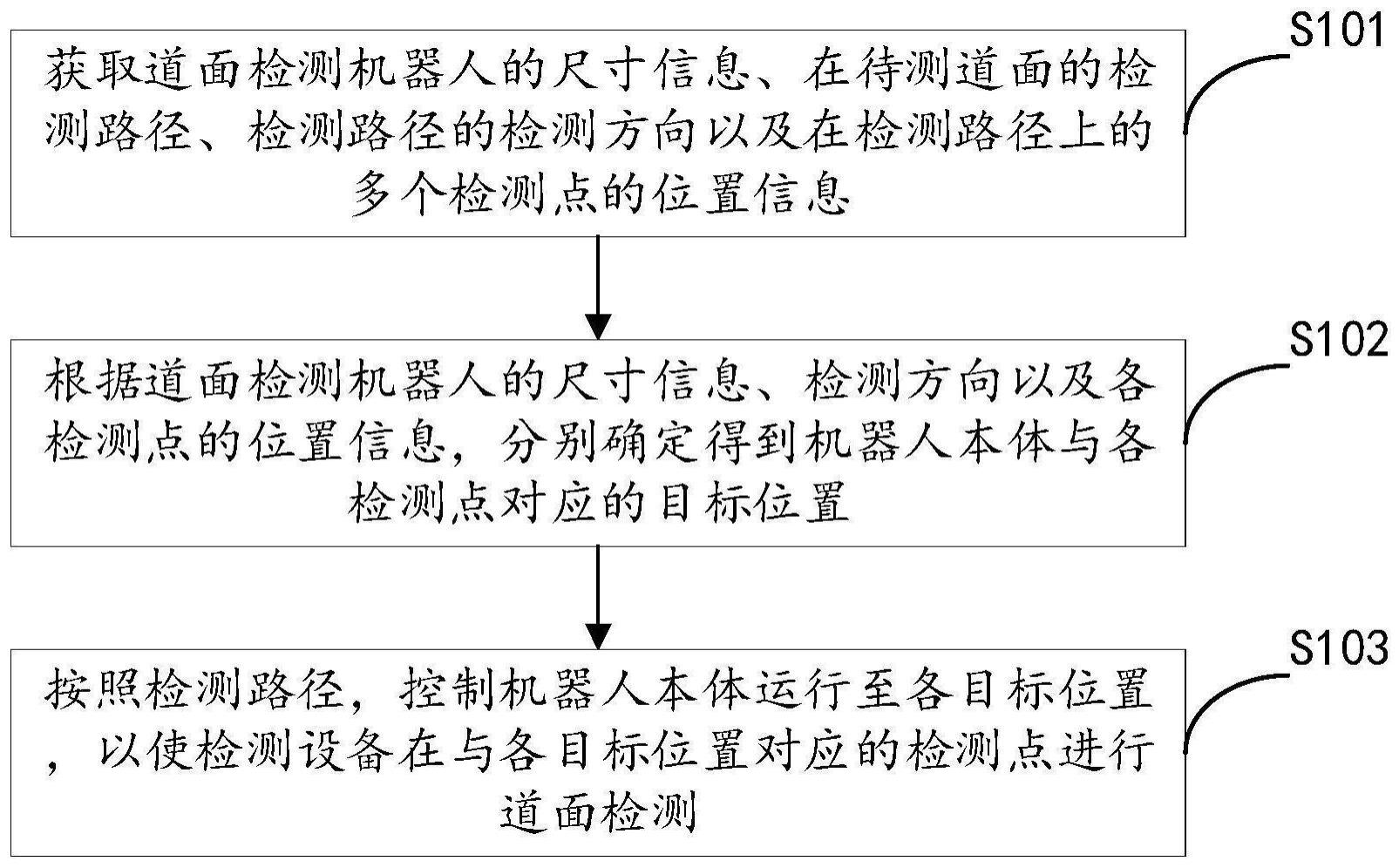
4、获取所述道面检测机器人的尺寸信息、在待测道面的检测路径、在所述检测路径的检测方向以及在所述检测路径上的多个检测点的位置信息;
5、根据所述道面检测机器人的尺寸信息、所述检测方向以及各所述检测点的位置信息,分别确定得到所述机器人本体与各所述检测点对应的目标位置;
6、按照所述检测路径,控制所述机器人本体运行至各所述目标位置,以使所述检测设备在与各所述目标位置对应的检测点进行道面检测。
7、在可选的实施方式中,所述根据所述道面检测机器人的尺寸信息、所述检测方向以及各所述检测点的位置信息,分别确定得到所述机器人本体与各所述检测点对应的目标位置的步骤包括:
8、根据所述道面检测机器人的尺寸信息,确定得到所述道面检测机器人的检测距离;
9、根据所述检测距离、所述检测方向以及各所述检测点的位置信息,确定得到与各所述检测点对应的所述机器人本体的目标位置。
10、在可选的实施方式中,所述机器人本体与所述检测设备通过刚性连接装置连接,所述道面检测机器人的尺寸信息包括所述机器人本体的尺寸信息、所述检测设备的尺寸信息,以及所述刚性连接装置的尺寸信息,所述根据所述道面检测机器人的尺寸信息,确定得到所述道面检测机器人的检测距离的步骤包括:
11、根据所述机器人本体的尺寸信息,确定得到所述机器人本体的几何中心;
12、根据所述几何中心以及所述刚性连接装置在所述机器人本体上的安装位置,确定得到所述几何中心与所述刚性连接装置的第一间隔距离;
13、根据所述检测设备的尺寸信息以及所述刚性连接装置在所述检测设备上的安装位置,确定得到所述检测设备上对应各所述检测点的检测中心与所述刚性连接装置的第二间隔距离;
14、根据所述第一间隔距离、所述第二间隔距离以及所述刚性连接装置的尺寸信息,确定得到所述道面检测机器人的检测距离。
15、在可选的实施方式中,所述根据所述检测距离、所述检测方向以及各所述检测点的位置信息,确定得到与各所述检测点对应的所述机器人本体的目标位置的步骤包括:
16、根据所述检测距离以及所述检测方向,确定得到所述机器人本体的目标偏移量;
17、根据各所述检测点的位置信息以及所述目标偏移量,确定得到与各所述检测点对应的所述机器人本体的目标位置。
18、在可选的实施方式中,所述获取所述道面检测机器人在待测道面的检测路径的步骤包括:
19、根据所述待测道面的宽度信息以及所述道面检测机器人的检测宽度,沿所述待测道面的长度方向,确定得到所述待测道面的路径集;所述路径集包括与所述待测道面的第一边界平行的多条初始路径,所述第一边界表征所述待测道面在长度方向上的任意一条边界;
20、根据设定的多个检测点的位置信息,从多条初始路径中确定得到检测路径;其中,所述检测路径包括设定的多个检测点。
21、在可选的实施方式中,所述根据设定的多个检测点的位置信息,从多条初始路径中确定得到检测路径的步骤包括:
22、根据设定的多个检测点,从多条所述初始路径中,确定得到多条行走路径;其中,每条所述行走路径至少设置有一个所述检测点;
23、针对每条行走路径,根据所述道面检测机器人在待测道面的检测起始位置,确定得到该行走路径以及与该行走路径相邻的下一行走路径的间隔距离;
24、根据所述间隔距离以及所述道面检测机器人的转弯半径,确定得到与该行走路径对应的转弯路径;
25、根据各所述行走路径以及与各所述行走路径所对应的转弯路径,确定得到所述道面检测机器人的检测路径。
26、在可选的实施方式中,所述按照所述检测路径,控制所述机器人本体运行至各所述目标位置,以使所述检测设备在与各所述目标位置对应的检测点进行道面检测的步骤包括:
27、根据所述道面检测机器人在所述检测路径的检测方向,确定各所述目标位置中的初始目标位置以及最终目标位置;
28、按照所述检测路径,控制所述机器人本体运行至所述初始目标位置,并控制所述检测设备在与所述初始目标位置对应的检测点进行检测;
29、将与所述初始目标位置相邻的下一目标位置设置为新的初始目标位置,控制所述机器人本体运行至所述新的初始目标位置,控制所述检测设备在与所述新的初始目标位置对应的检测点进行检测;以此迭代,直到所述机器人本体运行至所述最终目标位置,且所述检测设备在与所述最终目标位置对应的检测点完成道面检测。
30、第二方面,本发明实施例提供一种道面检测机器人控制装置,包括:
31、数据获取模块,用于获取所述道面检测机器人的尺寸信息、在待测道面的检测路径、在所述检测路径的检测方向以及在所述检测路径上的多个检测点的位置信息;
32、计算模块,用于根据所述道面检测机器人的尺寸信息、所述检测方向以及各所述检测点的位置信息,分别确定得到所述机器人本体与各所述检测点对应的目标位置;
33、控制模块,用于按照所述检测路径,控制所述机器人本体运行至各所述目标位置,以使所述检测设备在与各所述目标位置对应的检测点进行道面检测。
34、第三方面,本发明实施例提供一种电子设备,所述电子设备包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现前述任一实施例所述的道面检测机器人控制方法。
35、第四方面,本发明实施例提供一种存储介质,所述存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现前述任一实施例所述的道面检测机器人控制方法。
36、本发明实施例提供的道面检测机器人控制方法、装置、电子设备和存储介质,在获取道面检测机器人的尺寸信息、在待测道面的检测路径、在检测路径的检测方向以及在检测路径上的多个检测点的位置信息后,根据道面检测机器人的尺寸信息、检测方向以及各检测点的位置信息,分别确定得到机器人本体与各检测点对应的目标位置,再按照检测路径,控制机器人本体运行至各目标位置,以使检测设备在与各目标位置对应的检测点进行道面检测。如此,通过机器人本体搭载检测设备,确定机器人本体与各检测点对应的目标位置信息后,控制机器人本体运行至各目标位置,并控制检测设备在各目标位置对应的检测点进行道面检测,提高了检测效率,能够快速、准确的进行道面检测。
- 还没有人留言评论。精彩留言会获得点赞!