一种基于路况监测的车辆悬架系统模型预测控制方法与流程
1.本发明涉及车辆悬架系统技术领域,特别是涉及一种基于路况监测的车辆悬架系统模型预测控制方法。
背景技术:
2.在飞速发展的今天,人们对于车辆的使用频率逐渐升高,乘客对于车辆驾乘的舒适感期望越来越高。而对于提高乘客的乘坐体验,减振无疑是一个必不可少的环节。悬架系统是汽车底部构造的重要部分,其主要功能是承载车身动态载荷、减小路面不平激励对车体的振动冲击,并尽量保持轮胎和路面的良好接触,以改善车辆的性能。所以,对悬架系统优化研究,使其可以有效的改善车辆的舒适性、稳定性和安全性,为现代化车辆的发展提供了有利条件。随着人们生活质量的提高,人们对于汽车的要求已经更加注重汽车的驾驶平顺性。
3.随着主动悬架思想的提出,对主动悬架实施控制以保证汽车行驶平稳性已经得到了众多汽车行业的关注。由于主动悬架可以随外界输入源的变化而实时地调节悬架的刚度与阻尼,以有效抑制不同工况下对人体的冲击。对主动悬架的控制依赖于实时监测路况信息,路况信息的获取来自于汽车前方安置的激光雷达。因此,通过激光雷达获取的路况信息数据为车辆主动悬架的控制系统提供了主动改变控制力的输入源。在现有的先进控制技术方案中,模型预测控制能从最优化未来状态的角度计算出控制信号输出,已经被成功而广泛应用于各行各业。模型预测控制的最优化思想得到了工程技术人员普遍接纳与好评。
4.然而,模型预测控制需要实时往复迭代的求解最小化问题,且在计算目标函数值时,需要不断地调用控制对象的机理模型来预测未来一段时间的系统状态。由于车辆主动悬架系统的控制要求响应迅速,若是应用模型预测控制思想来实施主动悬架的控制,则必须考虑悬架系统机理模型的在线计算负荷问题。从主动悬架系统的机理模型来看,其微分方程数量较多,非线性程度明显,因此使用主动悬架的机理模型预测未来的系统状态势必带来较大的计算量。因此,如何降低未来系统状态的预测计算量是有效发挥模型预测控制技术优势的关键。
技术实现要素:
5.本发明所要解决的技术问题是:如何通过神经网络模型运算取代主动悬架系统机理模型的运算,从而降低预测系统状态变量的计算负荷,从而可以更短迅速的对主动悬架系统实施模型预测控制,本发明提供一种基于路况监测的车辆悬架系统模型预测控制方法,首先通过随机路况数据和随机控制信号作为主动悬架系统模型的输入,而系统的离散状态作为输出,从而离线产生大量的训练数据,用于训练神经网络模型;其次,本发明方法将训练好的神经网络模型取代主动悬架系统的机理模型,根据激光雷达给出的路况监测数据和最小化问题的可行解作为神经网络模型输入,计算出系统状态的离散预测值,用于求解最小化问题,从而得到最优控制信号控制电动液压系统产生相应的控制力维持车身平
稳。
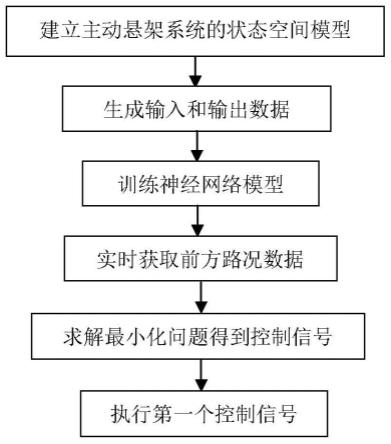
6.本发明解决其技术问题所要采用的技术方案是:一种基于路况监测的车辆悬架系统模型预测控制方法,包括以下步骤:
7.步骤1:确定主动悬架系统的状态变量,并建立车辆主动悬架系统的状态空间模型,再确定控制信号变化范围的最大值u
max
和最小值u
min
,并确定控制信号的单步变化最大值δu
max
。
8.控制信号是直接作用于电动液压系统,告诉电动液压系统提供相同的作用力。由于任何硬件设备都有工作范围的上限和下限,电动液压系统可提供的作用力同样是有最大值和最小值,该最大值和最小值即为控制信号的最大值u
max
和最小值u
min
。此外,由于电动液压系统是通过液体挤压产生作用力,在单步时间内,通过充液和泄液而产生的作用力同样有一个变化范围。这些变化范围的最大值和最小值都是电动液压系统硬件本身的技术指标。
9.由于四轮车辆的侧倾运动和俯仰运动具有相同的运动规律,实际应用中常针对二分之一的车辆悬架系统利用牛顿力学定律建立相应的机理模型,建立机理模型的基本原则就是根据牛顿力学定律,即:质量乘以加速度等于合外力。因此,本发明方法首先建立的机理模型具体如公式
①
所示:
[0010][0011]
其中,当下标号i等于1时,表示前悬架;当i等于2时,表示后悬架;表示悬架的垂向加速度,悬架的位移变化量xi表示悬架的垂向位移,bi表示悬架重心与车身重心之间的水平距离,表示车身俯仰角度(当车身水平时,),x0表示车身垂向位移,位移,表示车身垂向速度,表示车身俯仰角速度,表示车身垂向速度,ui表示电动液压系统的作用力(即:控制信号),轮胎的垂向形变位移δyi=y
i-xi,yi表示悬架的垂向路面凸起高度(若路面凹陷,则yi小于0),表示车身俯仰角加速度,表示车身的垂向加速度;m和m分别表示悬架系统的簧下质量和簧上质量,i0表示转动惯量,悬架的弹簧弹力fs(δxi)和阻尼力的计算方式如下所示:
[0012][0013]
上式
②
中,当时,符号函数当时,符号函数k
lin
和k
non
分别表示悬架弹簧的线性弹性系数和非线性弹性系数,c
lin
,c
sys
和c
non
分别表示悬架阻尼器的线性阻尼系数,对称阻尼系数和非线性阻尼系数,下标号i=1,2。同样的,轮胎因发生形变而产生的弹力ts(δyi)的计算方式如下所示:
[0014]
ts(δyi)=ζ
lin
·
δyi+ζ
non
·
(δyi)3ꢀꢀꢀ③
[0015]
上式中,ζ
lin
和ζ
non
分别表示轮胎的线性弹性系数和非线性弹性系数;i=1,2,i等于1时,表示前悬架,当i等于2时,表示后悬架。
[0016]
由于i等于1或2,公式
①
中的机理模型实则由4个微分方程组成,可确定出8个状态变量θ1,θ2,
…
,θ8,它们依次分别代表由此可为主动悬架系统建立如下所示的状态空间模型,具体由8个状态方程组成,即:
[0017][0018]
其中,δθ1,δθ2,
…
,δθ8分别表示8个状态变量θ1,θ2,
…
,θ8对应的变化量,δt表示单步时间,下标号i=1,2。
[0019]
根据公式
②
可知,公式
④
中的fs(θ7+b1·
θ
4-θ3)表示悬架的弹簧弹力,fd(θ5+b1·
θ
2-θ1)表示悬架的阻尼力,悬架的弹簧弹力fs(θ7+b1·
θ
4-θ3)和阻尼力fd(θ5+b1·
θ
2-θ1)的计算方式如下:
[0020][0021]
公式
⑤
中,当θ5+b1·
θ
2-θ1≥0时,sign(θ5+b1·
θ
2-θ1)=1;当θ5+b1·
θ
2-θ1<0时,sign(θ5+b1·
θ
2-θ1)=-1。
[0022]
同样的,根据公式
③
可知,轮胎因发生形变而产生的弹力ts(y
i-θ
4+i
)的计算方式如下所示:
[0023]
ts(y
i-θ
4+i
)=ζ
lin
·
(y
i-θ
4+i
)+ζ
non
·
(y
i-θ
4+i
)3ꢀꢀꢀ⑥
[0024]
上式
⑥
中,ζ
lin
和ζ
non
分别表示轮胎的线性弹性系数和非线性弹性系数;i=1,2,i等于1时,表示前悬架,当i等于2时,表示后悬架。
[0025]
步骤2:按照步骤2.1至步骤2.4产生n组输入数据和n组输出数据。
[0026]
步骤2.1:初始化数据组数j=1,设置8个状态变量θ1,θ2,
…
,θ8都等于0,再设置控制信号ui的初始值
[0027]
步骤2.2:从区间[-0.02,0.02]上分别随机生成前悬架的垂向路面凸起高度y1和
后悬架的垂向路面凸起高度y2,并从区间上随机生成前悬架的控制信号u1和后悬架的控制信号u2后,再设置第j组输入数据中的12个数据依次等于θ1,θ2,
…
,θ8,y1,y2,u1,u2。
[0028]
步骤2.3:利用主动悬架系统的状态空间模型,计算出δθ1,δθ2,
…
,δθ8,再根据公式θb=θb+δθb,b=1,2,3......8,更新状态变量θ1,θ2,
…
,θ8后,将第j组输出数据中的8个数据依次分别设置成等于θ1,θ2,
…
,θ8。
[0029]
步骤2.4:判断数据组数j是否小于n;若是,则设置j=j+1,然后返回步骤2.2继续生成数据;若否,则得到n组输入数据和n组输出数据。
[0030]
需要指出的是,由于公式
④
中的单步时间δt是已知的,根据公式
④
中关于δθ1/δt的状态方程,计算δθ1如下:
[0031][0032]
同理,可根据公式
④
中第2个至第8个状态方程依次计算δθ2,δθ3,
…
,δθ8。
[0033]
步骤3:建立神经网络模型,并确定神经网络模型的中间层神经元个数为h,利用n组输入数据和n组输出数据对神经网络模型进行训练,得到神经网络模型的参数,参数具体包括:中间层神经元的h个参考向量中间层神经元的h个平滑因子δ1,δ2,
…
,δh,输出神经元的8个系数向量w1,w2,
…
,w8。
[0034]
步骤4:当车辆行驶时,利用车辆前置的激光雷达实时监测车辆前方路况数据,并根据车速转换得到未来l个控制时刻的垂向路面凸起高度的监测值和其中,分别表示前悬架的垂向路面凸起高度在未来第1个控制时刻,未来第2个控制时刻,
…
,未来第l个控制时刻的监测值;分别表示后悬架的垂向路面凸起高度在未来第1个控制时刻,未来第2个控制时刻,
…
,未来第l个控制时刻的监测值。
[0035]
步骤5:根据公式
⑧
求解带约束条件的最小化问题,从而得到控制信号ui在未来l个控制时刻的预测值
[0036][0037]
其中,权重系数λ的取值范围是0<λ<1,垂向加速度在未来第α个控制时刻的变化值俯仰角加速度在未来第α个控制时刻的变化值控制信号ui在未来第α个控制时刻的变化值遗忘因子μ
(α)
满足条件μ
(1)
≥μ
(2)
≥
…
≥μ(
l)
,和分别对应表示状态变量θ1和θ2在未来第α个控制时刻的预测
值,和分别对应表示控制信号u1和u2在未来第α个控制时刻的预测值,s.t.表示约束条件英文单词subject to的缩写,表示任意设置α=1,2,
…
,l;当α=1时,和分别对应表示状态变量θ1和θ2的初始值,和分别对应表示控制信号u1和u2的初始值。
[0038]
求解公式
⑧
中最小化问题的过程中,每次优化迭代时都会得到一组控制信号的预测值,即:结合垂向路面凸起高度的监测值和再调用步骤3中训练好的神经网络模型,即可计算得到用于步骤5中计算和的预测值和
[0039]
预测值和具体的计算过程包括以下步骤:
[0040]
步骤5.1:设置α=1,初始化输入向量z,将组成12
×
1维的输入向量z,其中,分别对应表示状态变量θ1,θ2,
…
,θ8的初始值。
[0041]
步骤5.2:利用步骤3中训练好的神经网络模型,计算输入向量z对应的输出向量
[0042]
利用训练好的神经网络模型计算输入向量z对应的输出向量的具体实施过程如步骤5.21至步骤5.23所示。
[0043]
步骤5.21:根据公式
⑨
计算中间层神经元的输出值β1,β2,
…
,βh:
[0044][0045]
公式
⑨
中,e表示自然常数,上标号t表示向量的转置,下标号h=1,2,
…
,h。
[0046]
步骤5.22:将β1,β2,
…
,βh组成h
×
1维的实数向量β后,再根据公式计算输出层神经元的输出值γ1,γ2,
…
,γ8。
[0047]
步骤5.23:将γ1,γ2,
…
,γ8组成8
×
1维的输出向量
[0048]
步骤5.3:设置8个状态变量θ1,θ2,
…
,θ8在未来第α个控制时刻的预测值依次等于输出向量中的8个数据,再分别根据公式和计算出在未来第α个控制时刻的变化值和需要注意的是,此处预测值为8个,但是在计算变化值时,只取预测值的前两个,即状态变量θ1和θ2的预测值和计算变化值。
[0049]
步骤5.4:判断控制时刻是否满足条件α<l;若是,根据公式α=α+1更新α,然后,对输入向量z进行更新,将组成12
×
1维的输入向量z,再
返回步骤5.2;若否,则设置状态变量的初始值依次等于未来第l个控制时刻的预测值并输出第1到第l个控制时刻垂向加速度和俯仰角加速度的变化值和将垂向加速度和俯仰角加速度的变化值代入到公式
⑧
中从而得到控制信号ui在未来l个控制时刻的预测值
[0050]
步骤6:将根据公式
⑧
优化求解后的预测值和分别发送给前后悬架的电动液压系统,并通过电动液压系统执行相应动作。
[0051]
通过以上所述实施步骤,本发明方法的优势介绍如下:
[0052]
本发明方法通过随机产生控制信号和垂向路面凸起高度数据的方式,大量生成用于神经网络模型训练的输入数据和输出数据。只要数据量够大包含各种可能性,相应的神经网络模型即可以高精度逼近主动悬架系统的机理模型。相比于直接使用机理模型计算状态变量的预测值和变化值而言,使用神经网络模型可以发挥其较强的非线性逼近能力和快速计算能力的优势,从而实现模型预测控制的高速运算和高频率的实施控制。
附图说明
[0053]
下面结合附图和实施例对本发明作进一步说明。
[0054]
图1是本发明最佳实施例的结构示意图。
具体实施方式
[0055]
现在结合附图对本发明作详细的说明。此图为简化的示意图,仅以示意方式说明本发明的基本结构,因此其仅显示与本发明有关的构成。
[0056]
如图1所示,本发明的一种基于路况监测的车辆悬架系统模型预测控制方法,包括以下步骤:
[0057]
步骤1:确定主动悬架系统的状态变量,并建立车辆主动悬架系统的状态空间模型,再确定控制信号变化范围的最大值u
max
和最小值u
min
,并确定控制信号的单步变化最大值δu
max
。
[0058]
由于四轮车辆的侧倾运动和俯仰运动具有相同的运动规律,实际应用中常针对二分之一的车辆悬架系统利用牛顿力学定律建立相应的机理模型,建立机理模型的基本原则就是根据牛顿力学定律,即:质量乘以加速度等于合外力。因此,本发明方法首先建立的机理模型具体如公式
①
所示:
[0059][0060]
其中,当下标号i等于1时,表示前悬架;当i等于2时,表示后悬架;表示悬架的垂向加速度,悬架的位移变化量xi表示悬架的垂向位移,bi表示悬架重心与车身重心之间的水平距离,表示车身俯仰角度(当车身水平时,),x0表示车身垂
向位移,向位移,表示车身垂向速度,表示车身俯仰角速度,表示车身垂向速度,ui表示电动液压系统的作用力(即:控制信号),轮胎的垂向形变位移δyi=y
i-xi,yi表示悬架的垂向路面凸起高度(若路面凹陷,则yi小于0),表示车身俯仰角加速度,表示车身的垂向加速度;m和m分别表示悬架系统的簧下质量和簧上质量,i0表示转动惯量,悬架的弹簧弹力fs(δxi)和阻尼力的计算方式如下所示:
[0061][0062]
上式
②
中,当时,符号函数当时,符号函数k
lin
和k
non
分别表示悬架弹簧的线性弹性系数和非线性弹性系数,c
lin
,c
sys
和c
non
分别表示悬架阻尼器的线性阻尼系数,对称阻尼系数和非线性阻尼系数,下标号i=1,2。同样的,轮胎因发生形变而产生的弹力ts(δyi)的计算方式如下所示:
[0063]
ts(δyi)=ζ
lin
·
δyi+ζ
non
·
(δyi)3ꢀꢀꢀ③
[0064]
上式中,ξ
lin
和ζ
non
分别表示轮胎的线性弹性系数和非线性弹性系数;i=1,2,i等于1时,表示前悬架,当i等于2时,表示后悬架。
[0065]
由于i等于1或2,公式
①
中的机理模型实则由4个微分方程组成,可确定出8个状态变量θ1,θ2,
…
,θ8,它们依次分别代表由此可为主动悬架系统建立如下所示的状态空间模型,具体由8个状态方程组成,即:
[0066][0067]
其中,δθ1,δθ2,
…
,δθ8分别表示8个状态变量θ1,θ2,
…
,θ8对应的变化量,δt表示单步时间,下标号i=1,2。
[0068]
根据公式
②
可知,公式
④
中的fs(θ7+b1·
θ
4-θ3)表示悬架的弹簧弹力,fd(θ5+b1·
θ
2-θ1)表示悬架的阻尼力,悬架的弹簧弹力fs(θ7+b1·
θ
4-θ3)和阻尼力fd(θ5+b1·
θ
2-θ1)的计
算方式如下:
[0069][0070]
公式
⑤
中,当θ5+b1·
θ
2-θ1≥0时,sign(θ5+b1·
θ
2-θ1)=1;当θ5+b1·
θ
2-θ1<0时,sign(θ5+b1·
θ
2-θ1)=-1。
[0071]
同样的,根据公式
③
可知,轮胎因发生形变而产生的弹力ts(y
i-θ
4+i
)的计算方式如下所示:
[0072]
ts(y
i-θ
4+i
)=ζ
lin
·
(y
i-θ
4+i
)+ζ
non
·
(y
i-θ
4+i
)3ꢀꢀꢀꢀ⑥
[0073]
上式
⑥
中,ζ
lin
和ζ
non
分别表示轮胎的线性弹性系数和非线性弹性系数;i=1,2,i等于1时,表示前悬架,当i等于2时,表示后悬架。
[0074]
步骤2:按照步骤2.1至步骤2.4产生n组输入数据和n组输出数据。
[0075]
步骤2.1:初始化数据组数j=1,设置8个状态变量θ1,θ2,
…
,θ8都等于0,再设置控制信号ui的初始值
[0076]
步骤2.2:从区间[-0.02,0.02]上分别随机生成前悬架的垂向路面凸起高度y1和后悬架的垂向路面凸起高度y2,并从区间上随机生成前悬架的控制信号u1和后悬架的控制信号u2后,再设置第j组输入数据中的12个数据依次等于θ1,θ2,
…
,θ8,y1,y2,u1,u2。
[0077]
步骤2.3:利用主动悬架系统的状态空间模型,计算出δθ1,δθ2,
…
,δθ8,再根据公式θb=θb+δθb,b=1,2,3......8,更新状态变量θ1,θ2,
…
,θ8后,将第j组输出数据中的8个数据依次分别设置成等于θ1,θ2,
…
,θ8。
[0078]
步骤2.4:判断数据组数j是否小于n;若是,则设置j=j+1,然后返回步骤2.2继续生成数据;若否,则得到n组输入数据和n组输出数据。
[0079]
需要指出的是,由于公式
④
中的单步时间δt是已知的,根据公式
④
中关于δθ1/δt的状态方程,计算δθ1如下:
[0080][0081]
同理,可根据公式
④
中第2个至第8个状态方程依次计算δθ2,δθ3,
…
,δθ8。
[0082]
步骤3:建立神经网络模型,并确定神经网络模型的中间层神经元个数为h,利用n组输入数据和n组输出数据对神经网络模型进行训练,得到神经网络模型的参数,参数具体包括:中间层神经元的h个参考向量中间层神经元的h个平滑因子δ1,δ2,
…
,δh,输出神经元的8个系数向量w1,w2,
…
,w8。
[0083]
步骤4:当车辆行驶时,利用车辆前置的激光雷达实时监测车辆前方路况数据,并根据车速转换得到未来l个控制时刻的垂向路面凸起高度的监测值和
其中,分别表示前悬架的垂向路面凸起高度在未来第1个控制时刻,未来第2个控制时刻,
…
,未来第l个控制时刻的监测值;分别表示后悬架的垂向路面凸起高度在未来第1个控制时刻,未来第2个控制时刻,
…
,未来第l个控制时刻的监测值。
[0084]
步骤5:根据公式
⑧
求解带约束条件的最小化问题,从而得到控制信号ui在未来l个控制时刻的预测值
[0085][0086]
其中,权重系数λ的取值范围是0<λ<1,垂向加速度在未来第α个控制时刻的变化值俯仰角加速度在未来第α个控制时刻的变化值控制信号ui在未来第α个控制时刻的变化值遗忘因子μ
(α)
满足条件μ
(1)
≥μ
(2)
≥
…
≥μ
(l)
,和分别对应表示状态变量θ1和θ2在未来第α个控制时刻的预测值,和分别对应表示控制信号u1和u2在未来第α个控制时刻的预测值,s.t.表示约束条件英文单词subject to的缩写,表示任意设置α=1,2,
…
,l;当α=1时,和分别对应表示状态变量θ1和θ2的初始值,和分别对应表示控制信号u1和u2的初始值。
[0087]
求解公式
⑧
中最小化问题的过程中,每次优化迭代时都会得到一组控制信号的预测值,即:结合垂向路面凸起高度的监测值和再调用步骤3中训练好的神经网络模型,即可计算得到用于步骤5中计算和的预测值和
[0088]
预测值和具体的计算过程包括以下步骤:
[0089]
步骤5.1:设置α=1,初始化输入向量z,将组成12
×
1维的输入向量z,其中,分别对应表示状态变量θ1,θ2,
…
,θ8的初始值。
[0090]
步骤5.2:利用步骤3中训练好的神经网络模型,计算输入向量z对应的输出向量
[0091]
利用训练好的神经网络模型计算输入向量z对应的输出向量的具体实施过程如步骤5.21至步骤5.23所示。
[0092]
步骤5.21:根据公式
⑨
计算中间层神经元的输出值β1,β2,
…
,βh:
[0093]
[0094]
公式
⑨
中,e表示自然常数,上标号t表示向量的转置,下标号h=1,2,
…
,h。
[0095]
步骤5.22:将β1,β2,
…
,βh组成h
×
1维的实数向量β后,再根据公式计算输出层神经元的输出值γ1,γ2,
…
,γ8。
[0096]
步骤5.23:将γ1,γ2,
…
,γ8组成8
×
1维的输出向量
[0097]
步骤5.3:设置8个状态变量θ1,θ2,
…
,θ8在未来第α个控制时刻的预测值依次等于输出向量中的8个数据,再分别根据公式和计算出在未来第α个控制时刻的变化值和需要注意的是,此处预测值为8个,但是在计算变化值时,只取预测值的前两个,即状态变量θ1和θ2的预测值和计算变化值。
[0098]
步骤5.4:判断控制时刻是否满足条件α<l;若是,根据公式α=α+1更新α,然后,对输入向量z进行更新,将组成12
×
1维的输入向量z,再返回步骤5.2;若否,则设置状态变量的初始值依次等于未来第l个控制时刻的预测值并输出第1到第l个控制时刻垂向加速度和俯仰角加速度的变化值和将垂向加速度和俯仰角加速度的变化值代入到公式
⑧
中从而得到控制信号ui在未来l个控制时刻的预测值
[0099]
步骤6:将根据公式
⑧
优化求解后的预测值和分别发送给前后悬架的电动液压系统,并通过电动液压系统执行相应动作。
[0100]
需要注意的是,关于变量更新的公式中的“=”表示将右侧的计算结果赋值给左侧的变量,采用了计算机程序的表示方式,包括但不限于公式θb=θb+δθb,j=j+1,α=α+1,其他公式中“=”表示等于。
[0101]
以上述依据本发明的理想实施例为启示,通过上述的说明内容,相关的工作人员完全可以在不偏离本发明的范围内,进行多样的变更以及修改。本项发明的技术范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1