一种基于人工智能的绝缘斗臂车斗内温控系统的制作方法
1.本发明属于绝缘斗臂车电力施工技术领域,具体涉及一种基于人工智能的绝缘斗臂车斗内温控系统。
背景技术:
2.绝缘斗臂车为一种在交通方便且布线复杂的场合进行等电位作业的特殊车辆。作业人员在绝缘斗臂车的车斗内密闭作业。
3.目前绝缘斗臂车能实现冬夏两季斗内温度控制,但不能进行人机交互,工作负责人不能实时掌握斗内作业人员的身体状态,斗内作业人员在冬夏两季作业安全缺乏保障。
4.此为现有技术的不足,因此,针对现有技术中的上述缺陷,提供一种基于人工智能的绝缘斗臂车斗内温控系统,是非常有必要的。
技术实现要素:
5.针对现有技术的上述现有绝缘斗臂车的斗内作业人员的作业安全缺乏保障的缺陷,本发明提供一种基于人工智能的绝缘斗臂车斗内温控系统,以解决上述技术问题。
6.本发明提供一种基于人工智能的绝缘斗臂车斗内温控系统,包括绝缘斗臂车车斗;
7.绝缘斗臂车车斗内设置有主控模块、人员状态信息采集模块和温度控制模块;
8.主控模块通过远程连接有手持终端设备;
9.温度控制模块连接有环境温度传感器;
10.人员状态信息采集模块,用于采集斗内作业人员的实时状态信息,并通过主控模块将斗内作业人员的实时状态信息传递到手持终端设备;
11.手持终端设备,用于接收斗内作业人员的实时状态信息,并根据斗内作业人员的实时状态信息向温度控制模块发送第一温控指令;
12.温度控制模块,用于根据环境温度传感器采集的环境温度数据以及手持终端设备发送的第一温控指令,对绝缘斗臂车车斗内温度进行控制。
13.进一步地,人员状态信息采集模块包括红外检测单元、摄像头采集单元以及手环采集单元;
14.红外检测单元,用于通过红外线检测斗内作业人员的身体温度;
15.摄像头采集单元,用于通过摄像头检测斗内作业人员的面部信息;
16.手环采集单元,用于通过智能手环测量斗内作业人员的心率。通过实时采集斗内作业人员的身体温度、面部信息以及心率,可获知作业人员健康状况,确保作业人员安全。斗内作业人员的实时状态信息包括但不限于上述内容。
17.进一步地,主控模块还连接有语音识别模块和键盘输入模块;
18.语音识别模块,用于识别斗内作业人员的语音信息,解析出第二温控指令,并向温度控制模块发送第二温控指令;
19.键盘输入模块,用于接收斗内作业人员的输入信息,解析出第三温控指令,并向温度控制模块发送第三温控指令;
20.温度控制模块,还用于根据斗内作业人员的第二温控指令或第三温控指令,对绝缘斗臂车内温度进行控制。斗内作业人员可通过语音识别模块及键盘输入模块与温度控制模块交互,实现绝缘斗臂车内温度进行调节。
21.进一步地,手持终端设备包括语音模块;
22.绝缘斗臂车车斗内还设置有语音设备,语音设备佩戴于作业人员处,并与主控模块连接;
23.手持终端设备通过语音模块与作业人员处的语音设备建立通讯连接,进行信息沟通及作业人员作业量的下发。手持终端设备与语音模块可通过主控模块建立通讯,实现工作负责人与作业人员的信息沟通,保证作业人员安全;工作负责人还可根据作业人员实时状态信息合理安排各个作业人员的作业量,更好地保证作业人员安全的基础上,提高工作效率。
24.进一步地,温度控制模块包括控制单元和空调单元;
25.控制单元与空调单元连接,控制单元还连接有第一接口、第二接口、第三接口以及第四接口;
26.第一接口与环境温度传感器连接,用于将环境温度传感器采集的温度数据提供给控制单元;
27.第二接口通过无线信号与手持终端设备连接,用于将手持终端设备发送的第一温控指令提供给控制单元;
28.第三接口与语音识别模块连接,用于将根据语音识别模块生成的第二温控指令提供给控制单元;
29.第四接口与键盘输入模块连接,用于将根据斗内作业人员的输入信息生成的第三温控指令提供给控制单元。温度控制模块通过空调单元调控绝缘斗臂车斗内温度,并通过各个接口获取环境温度、工作负责人通过手持终端设备输入第一温控指令、斗内作业人员通过语音识别模块输入的第二温控指令,以及斗内作业人员通过键盘输入模块输入的第三温控指令。
30.进一步地,控制单元每间隔设定时间段,通过第一接口获取环境温度传感器采集的温度数据,并生成温度调整下限和温度调整上限;
31.控制单元根据环境温度传感器采集的温度数据生成目标温度,控制空调单元将绝缘斗臂车车斗内温度调整到目标温度;
32.当控制单元通过第二接口获取到手持终端设备发送的第一温控指令时,解析出第一待调整温度,并根据第一待调整温度控制空调单元将绝缘斗臂车车斗内温度进行对应调整;
33.当控制单元通过第三接口获取到语音识别模块发送的第二温控指令时,解析出第二待调整温度,并根据第二待调整温度控制空调单元将绝缘斗臂车车斗内温度进行对应调整;
34.当控制单元通过第四接口获取到键盘输入模块发送的第三温控指令时,解析出第三待调整温度,并根据第三待调整温度控制空调单元将绝缘斗臂车车斗内温度进行对应调
整。控制单元根据环境温度传感器采集的温度数据对车斗内温度进行自动调整,确保作业人员的安全;而当控制单元接收到手持终端设备及作业人员通过语音识别模块及键盘输入模块的温控指令时,优先进行温度调整。
35.进一步地,当第一待调整温度大于温度调整上限或小于温度调整下限时,控制单元判定第一待调整温度无效,不对绝缘斗臂车车斗内温度进行调整;
36.当第二待调整温度大于温度调整上限或小于温度调整下限时,控制单元判定第二待调整温度无效,不对绝缘斗臂车车斗内温度进行调整;
37.当第三待调整温度大于温度调整上限或小于温度调整下限时,控制单元判定第三待调整温度无效,不对绝缘斗臂车车斗内温度进行调整。设定温度调整上限和温度调整下限,防止手持终端设备处工作负责人及语音识别模块和键盘输入模块的作业人员误输入,导致温度调整异常,确保作业人员的安全。
38.进一步地,控制单元采用pid控制器。
39.进一步地,环境温度传感器采用ds 18b20型号的温度传感器。
40.进一步地,主控模块采用dsp芯片。
41.本发明的有益效果在于:
42.本发明提供的基于人工智能的绝缘斗臂车斗内温控系统,实现绝缘斗臂车车斗内作业人员状态信息的实时采集,使得工作负责人能够掌握作业人员状态,并可通过手持终端设备语音与作业人员及时沟通,保证作业人员的安全;温度控制模块可根据环境温度自动调节车斗内温度,并可接收作业人员语音及键盘输入调节温度,还可接收工作负责人通过手持终端设备输入调节温度。
43.此外,本发明设计原理可靠,结构简单,具有非常广泛的应用前景。
44.由此可见,本发明与现有技术相比,具有突出的实质性特点和显著的进步,其实施的有益效果也是显而易见的。
附图说明
45.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,对于本领域普通技术人员而言,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
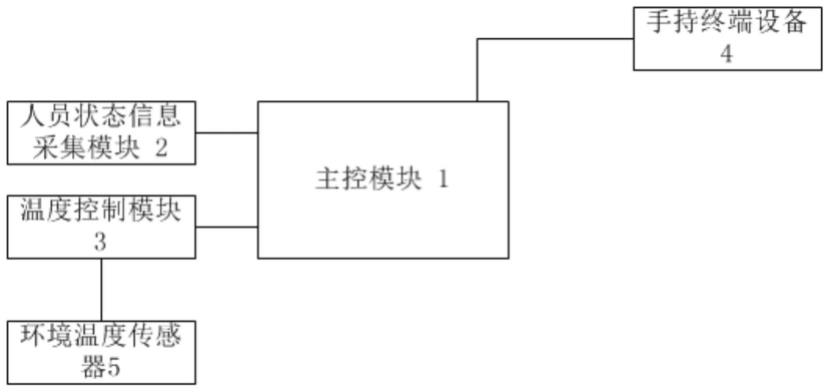
46.图1是本发明基于人工智能的绝缘斗臂车斗内温控系统实施例1示意图。
47.图2是本发明基于人工智能的绝缘斗臂车斗内温控系统实施例2示意图。
48.图中,1-主控模块;2-人员状态信息采集模块;2.1-红外检测单元;2.2-摄像头采集单元;2.3-手环采集单元;3-温度控制模块;3.1-控制单元;3.2-空调单元;3.3-第一接口;3.4-第二接口;3.5-第三接口;3.6-第四接口;4-手持终端设备;4.1-语音模块;5-环境温度传感器;6-语音识别模块;7-键盘输入模块;8-语音设备。
具体实施方式
49.为了使本技术领域的人员更好地理解本发明中的技术方案,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通
技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
50.下面对本发明中出现的关键术语进行解释。
51.实施例1:
52.如图1所示,本发明提供一种基于人工智能的绝缘斗臂车斗内温控系统,包括绝缘斗臂车车斗;
53.绝缘斗臂车车斗内设置有主控模块1、人员状态信息采集模块2和温度控制模块3;
54.主控模块1通过远程连接有手持终端设备4;
55.温度控制模块3连接有环境温度传感器5;
56.人员状态信息采集模块2,用于采集斗内作业人员的实时状态信息,并通过主控模块将1斗内作业人员的实时状态信息传递到手持终端设备4;
57.手持终端设备4,用于接收斗内作业人员的实时状态信息,并根据斗内作业人员的实时状态信息向温度控制模块3发送第一温控指令;
58.温度控制模块3,用于根据环境温度传感器5采集的环境温度数据以及手持终端设备4发送的第一温控指令,对绝缘斗臂车车斗内温度进行控制。
59.实施例2:
60.如图2所示,本发明提供一种基于人工智能的绝缘斗臂车斗内温控系统,包括绝缘斗臂车车斗;
61.绝缘斗臂车车斗内设置有主控模块1、人员状态信息采集模块2和温度控制模块3;主控模块1采用dsp芯片;
62.主控模块1通过远程连接有手持终端设备4;
63.温度控制模块3连接有环境温度传感器5;环境温度传感器5采用ds 18b20型号的温度传感器;
64.人员状态信息采集模块2,用于采集斗内作业人员的实时状态信息,并通过主控模块将1斗内作业人员的实时状态信息传递到手持终端设备4;
65.手持终端设备4,用于接收斗内作业人员的实时状态信息,并根据斗内作业人员的实时状态信息向温度控制模块3发送第一温控指令;
66.温度控制模块3,用于根据环境温度传感器5采集的环境温度数据以及手持终端设备4发送的第一温控指令,对绝缘斗臂车车斗内温度进行控制;
67.人员状态信息采集模块2包括红外检测单元2.1、摄像头采集单元2.2以及手环采集单元2.3;
68.红外检测单元2.1,用于通过红外线检测斗内作业人员的身体温度;
69.摄像头采集单元2.2,用于通过摄像头检测斗内作业人员的面部信息;
70.手环采集单元2.3,用于通过智能手环测量斗内作业人员的心率;
71.主控模块1还连接有语音识别模块6和键盘输入模块7;
72.语音识别模块6,用于识别斗内作业人员的语音信息,解析出第二温控指令,并向温度控制模块3发送第二温控指令;
73.键盘输入模块7,用于接收斗内作业人员的输入信息,解析出第三温控指令,并向温度控制模块3发送第三温控指令;
74.温度控制模块3,还用于根据斗内作业人员的第二温控指令或第三温控指令,对绝缘斗臂车内温度进行控制;
75.手持终端设备4包括语音模块4.1;
76.绝缘斗臂车车斗内还设置有语音设备8,语音设备8佩戴于作业人员处,并与主控模块1连接;
77.手持终端设备4通过语音模块4.1与作业人员处的语音设备8建立通讯连接,进行信息沟通及作业人员作业量的下发;
78.温度控制模块3包括控制单元3.1和空调单元3.2;控制单元3.1采用pid控制器;
79.控制单元3.1与空调单元3.2连接,控制单元3.1还连接有第一接口3.3、第二接口3.4、第三接口3.5以及第四接口3.6;
80.第一接口3.3与环境温度传感器5连接,用于将环境温度传感器5采集的温度数据提供给控制单元3.1;
81.第二接口3.4通过无线信号与手持终端设备4连接,用于将手持终端设备4发送的第一温控指令提供给控制单元3.1;
82.第三接口3.5与语音识别模块6连接,用于将根据语音识别模块6生成的第二温控指令提供给控制单元3.1;
83.第四接口3.6与键盘输入模块7连接,用于将根据斗内作业人员的输入信息生成的第三温控指令提供给控制单元3.1;
84.控制单元3.1每间隔设定时间段,通过第一接口3.3获取环境温度传感器5采集的温度数据,并生成温度调整下限和温度调整上限;
85.控制单元3.1根据环境温度传感器5采集的温度数据生成目标温度,控制空调单元3.2将绝缘斗臂车车斗内温度调整到目标温度;
86.当控制单元3.1通过第二接口3.4获取到手持终端设备4发送的第一温控指令时,解析出第一待调整温度,并根据第一待调整温度控制空调单元3.2将绝缘斗臂车车斗内温度进行对应调整;
87.当第一待调整温度大于温度调整上限或小于温度调整下限时,控制单元3.1判定第一待调整温度无效,不对绝缘斗臂车车斗内温度进行调整;
88.当控制单元3.1通过第三接口3.5获取到语音识别模块6发送的第二温控指令时,解析出第二待调整温度,并根据第二待调整温度控制空调单元3.2将绝缘斗臂车车斗内温度进行对应调整;
89.当第二待调整温度大于温度调整上限或小于温度调整下限时,控制单元3.1判定第二待调整温度无效,不对绝缘斗臂车车斗内温度进行调整;
90.当控制单元3.1通过第四接口3.6获取到键盘输入模块7发送的第三温控指令时,解析出第三待调整温度,并根据第三待调整温度控制空调单元3.2将绝缘斗臂车车斗内温度进行对应调整;
91.当第三待调整温度大于温度调整上限或小于温度调整下限时,控制单元3.1判定第三待调整温度无效,不对绝缘斗臂车车斗内温度进行调整。
92.尽管通过参考附图并结合优选实施例的方式对本发明进行了详细描述,但本发明并不限于此。在不脱离本发明的精神和实质的前提下,本领域普通技术人员可以对本发明
的实施例进行各种等效的修改或替换,而这些修改或替换都应在本发明的涵盖范围内/任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1