一种基于高斯参考点自适应策略的多目标路径规划方法
1.本发明属于移动机器人技术领域,具体地说是涉及一种基于高斯参考点自适应策略的多目标路径规划方法。
背景技术:
2.移动机器人已广泛应用于环境监视、地质勘探、制造业、农业生产等多个领域。在移动过程中,机器人需要掌握所在环境的特性及障碍物的位置,找出一条从起始位置到目标位置的无碰撞平滑最优路径,即路径规划,才能安全地实现面向目标的运动,完成特定任务。然而在不规则、复杂地形环境中,例如海底、野外,地形的起伏度、坡度、粗糙度和高度等因素,增加了机器人穿越该区域的难度。因此,在复杂地形中,合理的路径规划方法对移动机器人能否安全高效地完成任务至关重要。
3.传统的路径规划方法,如dijkstras算法、a*算法、概率路线图算法(prm),快速搜索随机树算法(rrt)等,都成功地应用于路径规划问题中,然而在复杂问题中往往计算量大,容易陷入局部最优。近年来,各种智能优化算法,如遗传算法(ga)、蚁群优化(aco),和粒子群优化(pso)等,由于其优越的全局搜索能力,即使在复杂问题上也能找到高质量解,被广泛应用于移动机器人的路径规划研究,弥补了传统方法的不足。然而,现有的智能路径规划方法大多是对路径长度、平滑性及有效性等多个目标进行加权求和的单目标优化方案。多个目标之间必然存在矛盾,如何权衡这些目标,需要调整权重系数,但合适的权重系数难以确定。并且由于各个目标之间量纲不统一,量纲小的目标若存在噪声干扰,会严重影响单目标优化方案的鲁棒性。相比于单目标优化,多目标优化方法能够提供多种路径解,依据偏好可以选择最合适的路径解决方案。并且在不确定的环境中,若获得的最优路径意外不可行,诸多备份方案还可以显著提高方法的鲁棒性。因此,采用多目标智能优化方法研究复杂地形环境下的机器人路径规划问题,具有重要的应用前景。
4.现有的多目标优化方法,如基于指标的参考点适应多目标进化算法(armoea)、基于指标搜索的多目标进化算法(ibea)、多目标差分进化算法(moead)等,在应对野外复杂地形的适应能力还存在一定不足,有待于进一步提高。
技术实现要素:
5.为了克服现有技术存在的不足,本发明提供了一种基于高斯参考点自适应策略的多目标路径规划方法,本发明能够有效提升路径规划算法应对野外复杂地形的适应能力。
6.一种高斯参考点自适应策略的多目标路径规划方法,包括下述步骤:
7.(1)根据路径长度、均匀度及选择的各种地形因子,构建面向非结构环境的多目标路径规划优化函数;
8.(2)基于多目标路径规划优化函数,采用高斯拟合生成参考点集,在此基础上,依据参考点集的分布性、自适应性、非支配贡献点的选择率、以及数量稳定四个因素,建立高斯参考点自适应策略。
9.作为优选,步骤(1)为:
10.采用规则网格法构建高程地图环境,并通过计算某块区域单元曲面面积与投影面积比值,获得粗糙度图;
11.地形上一组点集[p1,p2,
…
pn]按顺序连接,采用样条函数插值的方法产生一个路径解:
[0012]
path=spline([p1,p2,
…
pn])=[p1,p2,
…
pk]
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0013]
式中,spline表示三次样条插值函数,p1=p1为起始点,pn=pk为终点;
[0014]
在路径解基础上,构建路径长度l表示为:
[0015][0016]
式中,dis表示距离,pi表示路径解插值点;
[0017]
在路径解基础上,路径均匀度u以路径插值点的标准偏差估计值表示:
[0018]
u=var(dis(pi,p
i+1
))
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0019]
式中:var表示标准偏差函数;
[0020]
以路径长度l为基本目标,其它因素均加权引入,建立路径规划多目标优化函数为:
[0021]
f1=r
1 l+u(path);
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0022]
f2=r
2 l+∑r(path);
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0023]
f3=r
3 l+∑h(path);
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0024]
式中:r1,r2,r3为权重系数,u(path)表示路径解path的均匀度值,∑r(path)为路径解在粗糙度图上的取值累计,∑h(path)为路径解在高程图上的相对高度累计。
[0025]
作为优选,步骤(2)为:首先随机初始化一个大小为n的种群p,并将它复制给外部文档a,初始化生成参考点集r;在优化过程中,省略交配池选择策略,直接由种群p依据遗传算子产生子代种群o;然后,依据高斯参考点自适应策略,利用子代种群o来更新外部文档a和自适应参考点集r’,最后利用环境选择策略,选出下一代种群p’。
[0026]
作为优选,自适应参考点集r’由参考点集r1、r2,以及外部文档a中的部分解组成。
[0027]
作为优选,通过下述步骤建立高斯参考点自适应策略:
[0028]
(i)首先删除集合[o,a]中所有的重复解或被支配解,保留非支配解,保存至外部文档a;
[0029]
(ii)基于外部文档a中所有解拟合高斯模型,均匀采样生成高斯参考点集rg;
[0030]
(iii)依据高斯参考点集rg,寻找a中的贡献点,即存在rg中的点离它的距离比离其它a中的解更近;而离每个a中有贡献解最近的rg中的点,组成参考解集r1;
[0031]
(iv)在高斯参考点集rg中,删除支配解以及被a支配的解,形成参考点集r2;
[0032]
(v)令自适应参考点集r’=[r1,r2],删除其中重复解;若r’中参考点的数量小于设定值nr,采用解目标向量之间的角度来衡量[r’,a]中解的拥挤程度,再从a中选择最不拥挤的解保存至r’,直至r’中参考点的数量为nr。
[0033]
作为优选,步骤(i)获取当前子代种群o中每维最小目标值所构成的range
min
以及每维最大目标值所构成的点range
max
;然后,利用将外部文档a变换至[0,range
max-range
min
]范围内。
[0034]
本发明的有益效果在于:
[0035]
本发明综合考虑高程值、粗糙度等地形因素,建立适用于不规则地形环境的多目标优化函数;优化算法中增加了高斯参考点自适应策略,有助于增加非支配贡献点的选择机率,提升路径规划算法应对野外复杂地形的适应能力。
附图说明
[0036]
图1是本发明高斯参考点集与外部文档三维示意图;
[0037]
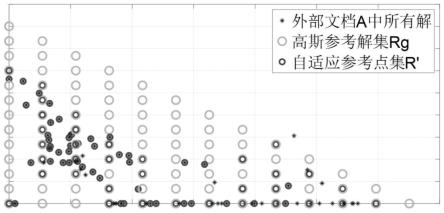
图2是本发明高斯自适应参考点集选择过程中高斯参考点集与外部文档平面示意图;
[0038]
图3是本发明高斯自适应参考点集选择过程中参考点集r1平面示意图;
[0039]
图4是本发明高斯自适应参考点集选择过程中参考点集r2平面示意图;
[0040]
图5是本发明高斯自适应参考点集选择过程中自适应参考点集r’平面示意图;
[0041]
图6是本发明路径规划仿真实验效果图。
具体实施方式
[0042]
下面结合具体实施例对本发明做进一步说明,但本发明所要保护的范围并不限于此。
[0043]
一种基于高斯参考点自适应策略的多目标路径规划方法,包括下述步骤:
[0044]
(1)构建面向非结构环境的多目标路径规划优化函数:根据路径长度、均匀度及选择的各种地形因子,构建面向非结构环境的多目标路径规划优化函数;
[0045]
采用规则网格法构建高程地图环境,并通过计算某块区域单元曲面面积与投影面积比值,获得粗糙度图;
[0046]
地形上一组点集[p1,p2,
…
pn]按顺序连接,采用样条函数插值的方法产生一个路径解:
[0047]
path=spline([p1,p2,
…
pn])=[p1,p2,
…
pk]
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0048]
式中,spline表示三次样条插值函数,p1=p1为起始点,pn=pk为终点;
[0049]
在路径解基础上,构建路径长度l表示为:
[0050][0051]
式中,dis表示距离,pi表示路径解插值点;
[0052]
在路径解基础上,路径均匀度u以路径插值点的标准偏差估计值表示:
[0053]
u=var(dis(pi,p
i+1
))
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0054]
式中:var表示标准偏差函数;
[0055]
以路径长度l为基本目标,其它因素均加权引入,建立路径规划多目标优化函数为:
[0056]
f1=r
1 l+u(path);
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0057]
f2=r
2 l+∑r(path);
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0058]
f3=r
3 l+∑h(path);
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0059]
式中:r1,r2,r3为权重系数,u(path)表示路径解path的均匀度值,∑r(path)为路径解在粗糙度图上的取值累计,∑h(path)为路径解在高程图上的相对高度累计。
[0060]
(2)基于高斯参考点自适应策略的多目标优化算法:基于多目标路径规划优化函
数,采用高斯拟合生成参考点集,在此基础上,依据参考点集的分布性、自适应性、非支配贡献点的选择率、以及数量稳定四个因素,建立高斯参考点自适应策略。
[0061]
首先随机初始化一个大小为n的种群p,并将它复制给外部文档a,初始化生成参考点集r;在优化过程中,省略交配池选择策略,直接由种群p依据遗传算子产生子代种群o;然后,依据高斯参考点自适应策略,利用子代种群o来更新外部文档a和自适应参考点集r’;最后利用环境选择策略,选出下一代种群p’。
[0062]
具体的,通过下述步骤建立高斯参考点自适应策略:
[0063]
(i)首先删除集合[o,a]中所有的重复解或被支配解,保留非支配解,保存至外部文档a;获取当前子代种群o中每维最小目标值所构成的range
min
以及每维最大目标值所构成的点range
max
;然后,利用将外部文档a变换至[0,range
max-range
min
]范围内,可以更好地适应具有不同复杂地形下的帕累托前沿面;
[0064]
(ii)基于外部文档a中所有解拟合高斯模型,均匀采样生成高斯参考点集rg;如图1和图2所示,可以看出,高斯参考点集rg不仅具有均匀分布性,还能够体现出当前不规则帕累托前沿面;
[0065]
(iii)依据高斯参考点集rg,寻找a中的贡献点,即存在rg中的点离它的距离比离其它a中的解更近;而离每个a中有贡献解最近的rg中的点,组成参考解集r1,如图3所示;参考解集r1,能够根据外部文档a,动态调整参考点的分布;
[0066]
(iv)在高斯参考点集rg中,删除支配解以及被a支配的解,形成参考点集r2,如图4所示;参考解集r2,有助于增加非支配贡献点的选择机率;
[0067]
(v)令自适应参考点集r’=[r1,r2],删除其中重复解;若r’中参考点的数量小于设定值nr,采用解目标向量之间的角度来衡量[r’,a]中解的拥挤程度,再从a中选择最不拥挤的解保存至r’,直至r’中参考点的数量为nr,如图5所示;避免由于r’中参考点数量过少,影响igd-ns指标的计算及贡献点的选取。
[0068]
本发明自适应参考点集r’由三部分组成,参考点集r1、r2,以及外部文档a中的部分解。将参考点自适应策略引入多目标进化算法框架,对路径规划多目标函数进行优化,以此得到最优路径解集。
[0069]
以反转世代距离igd(inverted generational distance)、超体积度量hv(hypervolume)和多样性指标dm(metric for diversity)作为评价指标,在多目标优化算法平台(platemo)进行仿真实验,与基于指标的参考点适应多目标进化算法(armoea)、基于指标搜索的多目标进化算法(ibea)、多目标差分进化算法(moead)、非支配排序遗传算法ii(nsga-ii)、非支配排序遗传算法iii(nsga-iii)和参考向量引导进化算法(reva)相比,结果如表1所示:
[0070]
表1
[0071]
指标armoeaibeamoeadnsga-iinsga-iiireva本发明igd0.94350.37082.95360.55141.05851.30220.2749hv0.09850.10540.06000.10710.09540.09270.1212dm0.59920.76260.51230.73580.56110.67750.8154
[0072]
从表1可以看出,本发明的三个指标均为最优。依据本发明方法获取三条备选路径,如图6所示,可以看出,依据本发明方法获取三条备选路径均具有可行性,说明本发明方
法能够有效提升路径规划算法应对野外复杂地形的适应能力。
[0073]
以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1