一种车辆自动驾驶模式与远程驾驶模式稳定切换方法与流程
1.本发明属于远程驾驶领域,具体涉及一种车辆自动驾驶模式与远程驾驶模式稳定切换方法。
背景技术:
2.远程控制技术是当今国内外研究的重要前沿课题。2015年1月,福特公司利用当时现有的设备和标准4g-lte技术对数千英里外的汽车进行了遥控驾驶的测试,因为是借助网络进行的远程控制,所以这辆车不需要物理机制来控制油门、方向盘和制动踏板,只需要使用显示器、模拟方向盘和模拟汽车踏板,就能够实现远程驾驶。2019年11月,5g远程驾驶亮相进博会,根据5g远程驾驶现场的演示视频来看,用户在展厅内操控方向盘,即可远程驾驶在室外的汽车进行行驶转弯等一系列动作。此时此景就好像用户在玩游戏一般,但却是通过5g网络实现远程对真实汽车的实时操控。从长远角度考虑,伴随5g网络的普及和相应政策的完善,在未来必会实现“人在家中坐,车在路上开”。
3.现有技术无人驾驶车辆从自动驾驶模式切换至远程驾驶模式时,需要先退出自动驾驶模式并减速驻车后才能进行远程接管驾驶,对于一些不能够驻车的场景(高架、高速或单车道道路等)存在安全隐患;无人驾驶车辆从远程驾驶模式切换至自动驾驶模式时,需要退出远程驾驶模式,等待自动驾驶模式接管行驶稳定之后,远程驾驶员才能够释放。
技术实现要素:
4.本发明的目的在于,提供一种车辆自动驾驶模式与远程驾驶模式稳定切换方法,解决了无人驾驶车辆从远程驾驶模式切换至自动驾驶模式时,需要退出远程驾驶模式,等待自动驾驶模式接管行驶稳定之后,远程驾驶员才能够释放的问题。
5.为解决上述技术问题,本发明的技术方案为:一种车辆自动驾驶模式与远程驾驶模式稳定切换方法,包括以下步骤:
6.车辆周期性检测并更新行车状态信息,车辆行车状态信息包括交通行驶环境信息和车辆自身行驶状态信息;
7.在自动驾驶模式下,当行车状态信息出现预设异常值时,车辆通过车载网联终端发送切换远程驾驶模式请求和行车状态信息至调度云平台;
8.调度云平台根据交通行驶环境信息对该车辆匹配较优远程驾驶台架及相应驾驶员;
9.远程驾驶台架发出确认接管响应时,该车辆由自动驾驶模式切换为远程驾驶模式;
10.车辆切换至远程驾驶模式后,车辆持续周期性检测行车状态信息,当行车状态信息未出现预设异常值时,车辆通过车载网联终端发送切换自动驾驶模式请求和行车状态信息至调度云平台;
11.调度云平台转发切换自动驾驶模式请求和行车状态信息至执行该车辆远程驾驶
的远程驾驶台架,当调度云平台和远程驾驶台架均发出确认切换自动模式判断时,该车辆由远程驾驶模式切换至自动驾驶模式。
12.车辆自身行驶状态信息至少包括当前时刻周期性检测的时间点、当前时刻的速度、当前时刻的加速度、当前时刻的方向盘转角、当前时刻的油门踏板开度、当前时刻的转向灯信号和当前时刻的远近灯光信号。
13.还提供一种自动驾驶模式与远程驾驶模式稳定切换系统,包括:
14.感知传感器,用于周期性检测并更新行车状态信息,车辆行车状态信息包括交通行驶环境信息和车辆自身行驶状态信息;
15.自动驾驶控制器,用于根据感知传感器获取的交通行驶环境信息控制车辆安全稳定行驶;
16.车载网联终端,用于接收远程驾驶台架的响应信息;
17.调度云平台,用于接收车辆反馈的行车状态信息;
18.远程驾驶台架,用于远程接管控制车辆;
19.在自动驾驶模式下,当行车状态信息出现预设异常值时,车辆通过车载网联终端发送切换远程驾驶模式请求和行车状态信息至调度云平台;
20.调度云平台根据交通行驶环境信息对该车辆匹配较优远程驾驶台架及相应驾驶员;
21.远程驾驶台架发出确认接管响应时,该车辆由自动驾驶模式切换为远程驾驶模式;
22.车辆切换至远程驾驶模式后,车辆持续周期性检测行车状态信息,当行车状态信息未出现预设异常值时,车辆通过车载网联终端发送切换自动驾驶模式请求和行车状态信息至调度云平台;
23.调度云平台转发切换自动驾驶模式请求和行车状态信息至执行该车辆远程驾驶的远程驾驶台架,当调度云平台和远程驾驶台架均发出确认切换自动模式判断时,该车辆由远程驾驶模式切换至自动驾驶模式。
24.车辆自身行驶状态信息至少包括当前时刻周期性检测的时间点、当前时刻的速度、当前时刻的加速度、当前时刻的方向盘转角、当前时刻的油门踏板开度、当前时刻的转向灯信号和当前时刻的远近灯光信号。
25.感知传感器至少包括摄像头、激光雷达、毫米波雷达以及超声波雷达。
26.还提供一种计算机设备,包括存储器、处理器以及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上述任一项所述方法的步骤。
27.还提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如上述任一项所述方法的步骤。
28.与现有技术相比,本发明的有益效果为:
29.本发明能在自动驾驶模式和远程驾驶模式平滑切换,解决了无人驾驶车辆从远程驾驶模式切换至自动驾驶模式时,需要退出远程驾驶模式,等待自动驾驶模式接管行驶稳定之后,远程驾驶员才能够释放的问题。
附图说明
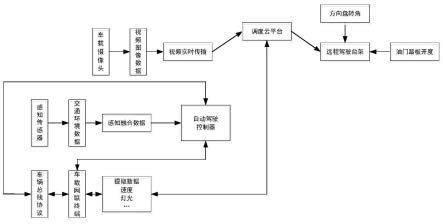
30.图1为本发明实施例中系统架构图;
31.图2为本发明实施例中自动驾驶模式切换远程驾驶模式方法流程示意图;
32.图3为本发明实施例中远程驾驶模式切换自动驾驶模式方法流程示意图。
具体实施方式
33.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
34.本发明的技术方案如下:
35.(1)整个智能驾驶系统具备对车辆远程监控、远程遥控和自动驾驶等功能,如图1所示,本系统包括:感知传感器、自动驾驶控制器、车载网联终端、车辆底盘执行器、遥控平台、调度云平台、和远程驾驶台架。感知传感器包括摄像头、激光雷达、毫米波雷达以及超声波雷达,用于获取车辆行驶环境信息;自动驾驶控制根据感知传感器获取的外部行驶环境信息控制车辆底盘执行器安全稳定行驶;车载网联终端用于接收远程驾驶信号;调度云平台用于接收远程车辆反馈的行驶环境和行驶状态信息;远程驾驶台架用于远程驾驶员远程接管控制车辆。
36.(2)第一阶段车辆处于自动驾驶模式下正常行驶,自动驾驶系统遭遇无法通过场景(包括但不限于无法避开障碍物、系统自检发现异常、道路过度拥堵或遭遇交通事故)时,即出现预设异常值时,自动驾驶系统申请自动驾驶降级并将请求发送给车载网联终端,车载网联终端转发驾驶模式切换请求至调度云平台,调度云平台根据实时视频数据和收到的驾驶模式切换请求原因分配最优远程驾驶台架和驾驶员进行接管控制,远程驾驶员确认模式切换请求。
37.(3)第二阶段车载网联终端进行车辆总线信息进行解析,获取当前车辆行驶状态信息总集b(t),其中某一时刻的行驶状态信息表示为b(x)={x,v(x),a(x),ω(x),τ(x),p(x),q(x)}∈b(t),x为当前时刻的时间点,v(x)为当前时刻的速度,a(x)为当前时刻的加速度,ω(x)为当前时刻的方向盘转角,τ(x)为当前时刻的油门踏板开度,p(x)为当前时刻的转向灯光信号,q(x)为当前时刻的远近灯光信号,然后将以上信号上传至调度云平台。
[0038][0039][0040]
(4)第三阶段调度云平台将信息发给远程驾驶台架并使远程驾驶台架做出响应,同时将可视信号发展示给远程驾驶员,便于其接管时有充分的准备,远程驾驶员准备完成
并确认接管,在远程驾驶台架响应的基础上进行远程控制驾驶,调度云平台将接管信息发送至车载网联终端进行驾驶模式切换。驾驶模式切换完成,由远程驾驶员代替自动驾驶系统继续执行本次行驶任务,在远程驾驶员接管控制行驶过程中。
[0041]
(5)第四阶段自动驾驶系统周期性检测当前交通行驶环境和行驶状态是否可以进行自动驾驶,若自动驾驶系统在连续时间t内检测到的交通行驶环境和行驶状态均满足自动驾驶系统行驶条件,则自动驾驶系统向车载网联终端发送驾驶模式切换请求,车载网联终端转发驾驶模式切换请求至调度云平台,调度云平台和远程驾驶员共同判定当前是否允许驾驶模式切换为自动驾驶,若系统和远程驾驶员均判断可以进行驾驶模式切换,则调度云平台将同意请求信号发送至车载网联终端,车载网联终端将信息转发至自动驾驶控制器,自动驾驶控制器进一步确认并准备进行接管控制,并将准备完成的信息通过车载网联终端传送至调度云平台,调度云平台驱使远程驾驶台架释放控制权,远程驾驶台架释放控制权之后,调度云平台将释放信号通过车载网联终端转发至自动驾驶控制器进行接管控制继续执行后续行驶任务。
[0042]
本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1