状态不可测的非线性系统自适应神经网络观测器控制方法
1.本发明涉及非线性系统控制技术领域,具体涉及一种状态不可测的非线性系统自适应神经网络观测器控制方法。
背景技术:
2.近年来,在系统状态完全可测的前提下,学者们针对不确定性非线性系统自适应控制进行了深入的研究,并取得了一些成果。然而,在实际工程中,由于噪声或缓慢的采样率,它们的状态往往具有较低的测量质量甚至不可测量,在设计非线性系统的控制方法时不可避免地受到影响。
3.为了解决这个问题,一般的方法是使用状态观测器来估计或过滤这些信号,因此人们越来越多关注基于状态观测器的不确定非线性系统的自适应控制研究。然而,在几乎所有已研究的观测器方法中,都存在一个共同的限制,即要求设计的增益常数满足hurwitz方程,由于这个限制,很多控制方法难以在实际工程中得到应用和推广。因此,迫切需要设计一种状态不可测的非线性系统自适应神经网络观测器控制方法,以解决现有观测器的控制器必须满足hurwitz方程的问题。
技术实现要素:
4.针对现有技术中存在的问题,本发明的目的在于提供一种状态不可测的非线性系统自适应神经网络观测器控制方法。
5.本发明解决其技术问题所采用的技术方案是:一种状态不可测的非线性系统自适应神经网络观测器控制方法,包括以下步骤:
6.1)设计单输入单输出严格反馈非线性系统;
7.2)利用神经网络逼近系统连续未知函数,设计自适应神经网络状态观测器及神经网络权重自适应法则;
8.3)自适应神经网络状态观测器的反推设计,将观测器的动态特性与反步法相结合,设计控制器:
9.①
定义跟踪误差,利用观测器得到的状态,得到其时间导数,定义反推设计第二步的跟踪误差,设计虚拟控制函数α1,采用lyapunov函数反推设计的第一个子系统;
10.②
定义估计的跟踪误差,然后设计虚拟控制函数αi;
11.③
最后设计控制函数u;
12.4)通过matlab软件进行理论和仿真验证。
13.具体的是,所述步骤1)中的单输入单输出严格反馈非线性系统为:
14.15.其中,是未知连续动力函数,u∈r是控制输入,是系统状态,只有x1(t)为可测状态,其余状态均为不可测状态。
16.具体的是,所述步骤2)中的连续未知函数为自适应神经网络状态观测器为:
[0017][0018]
其中,k1》1,ki》2是观测增益参数,和分别是和的估计。
[0019]
具体的是,所述步骤2)中的神经网络权重自适应法则为:
[0020][0021]
其中,σi》1是设计参数。
[0022]
具体的是,所述步骤3)的
①
中的跟踪误差为:e1(t)=x1(t)-yr(t),利用观测器得到的状态,误差e1(t)被估计为然后我们可以得到其时间导数:
[0023][0024]
第二步的跟踪误差为:虚拟控制函数的设计为:
[0025]
第一个子系统为:
[0026][0027]
具体的是,所述步骤3)的
②
中的估计的跟踪误差为:
[0028]
虚拟控制函数为:
[0029]
具体的是,所述步骤3)的
③
中的控制函数为:
[0030]
本发明具有以下有益效果:
[0031]
本发明设计的状态不可测的非线性系统自适应神经网络观测器控制方法:
[0032]
(1)与已有的方法相比,该观测器方法不需要满足hurwitz方程,因此更容易应用和推广到非线性系统控制中;
[0033]
(2)针对未知动态非线性系统提出了一种自适应控制方法,由于该控制方法不需要精确的系统确认,因此能满足广泛的实际控制工程系统的要求。
附图说明
[0034]
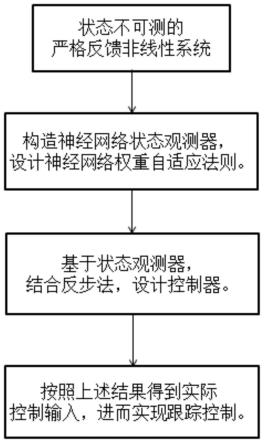
图1是状态不可测的非线性系统自适应神经网络观测器控制方法的流程图。
[0035]
图2是系统跟踪控制效果图。
[0036]
图3是跟踪误差图。
[0037]
图4是观测器误差图。
具体实施方式
[0038]
以下将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地进一步详细的说明。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0039]
如图1-4所示,状态不可测的非线性系统自适应神经网络观测器控制方法,针对状态不可测的严格反馈非线性系统,提供了一种新的自适应神经网络观测器控制方法。该观测器方法不要求设计常数必须满足hurwitz方程,这使得它可以更有效地应用于许多控制技术。
[0040]
一类严格反馈非线性系统的自适应神经网络观测器控制方法,具体包括以下内容:
[0041]
一:考虑一类单输入单输出严格反馈非线性系统:
[0042][0043]
在(1)式中,是未知连续动力函数,u∈r是控制输入,是系统状态,其中我们假设只有x1(t)为可测状态,其余状态均为不可测状态。
[0044]
控制任务:为单输入单输出严格反馈非线性系统(1)设计基于观测器的控制,使其满足(1)闭环控制的所有误差信号均为半全局一致最终有界(sguub);(2)系统输出能够以期望的精度跟踪预定义的参考信号yr(t)。
[0045]
假设1:期望参考轨迹yr(t)已知且有界,其导数也有界。
[0046]
引理1:考虑一个连续函数l(t)∈r具有有界初值。如果满足l(t)≤-al(t)+b,其中a,b是两个常数,且a》0,b》0,则下列不等式成立
[0047][0048]
二:设计自适应神经网络状态观测器
[0049]
由于除了x1(t)之外,其他状态都是不可测的,因此我们考虑自适应神经网络观测器方法。为了构造状态观测器,首先将系统重新表示如下:
[0050][0051]
其中,为观测增益参数。
[0052]
由于上述式子中的是未知连续函数,因此我们使用神经网络进行逼近
[0053][0054]
其中是x1,...,xi的估计,和是神经网络理想权重,s
f1
(x1)∈r
p
和是神经网络基函数向量。ε
f1
和ε
fi
是逼近误差,对于常数δ
f1
和δ
fi
,存在|ε
f1
|《δ
f1
,|ε
fi
|《δ
fi
。
[0055]
根据(4)式中的神经网络逼近,构建神经网络状态观测器如下
[0056][0057]
其中,k1》1,ki》2是观测增益参数,和分别是和的估计,它们的自适应法则设计如下
[0058][0059]
其中,σi》1是设计参数。
[0060]
根据公式(3)和公式(5),我们可以得到以下式子
[0061][0062]
其中是观测器误差。
[0063]
三:基于自适应状态观测器的反推设计
[0064]
第1步:定义跟踪误差e1(t)=x1(t)-yr(t),利用观测器(5)得到的状态,误差e1(t)可以被估计为然后我们可以得到其时间导数
[0065][0066]
将虚拟控制表示为α1,定义反推设计第二步的跟踪误差为那么(8)能够被重新表示为
[0067][0068]
虚拟控制函数α1设计如下
[0069][0070]
其中,γ1》1是设计常量。
[0071]
对于反推设计的第一个子系统,考虑以下lyapunov函数
[0072][0073]
对(11)求导,根据(6),(7)和(9)可得
[0074][0075]
将式(4)和(10)代入(12),可得
[0076][0077]
根据杨氏不等式以及我们可以得到以下式子
[0078][0079][0080]
将(14)和(15)代入等式,可以得到
[0081][0082]
其中存在常数b1》0,使得b1《b1。
[0083]
设a1={2(k
1-1),2(γ
1-1),σ1},可以得到以下不等式
[0084][0085]
其中,和两项在下一步中进行处理。
[0086]
第i步(i=2,
…
,n-1):类似于第1步,定义估计的跟踪误差为其时间导数如下
[0087][0088]
将αi作为虚拟控制,令
[0089][0090]
然后设计虚拟控制函数αi[0091][0092]
其中是一个设计常数。
[0093]
考虑如下lyapunov函数
[0094][0095]
对(21)求导,根据(6),(7)和(19)可得
[0096][0097]
将式(4)和(20)代入(22),得到
[0098][0099]
根据杨氏不等式和我们有
[0100][0101][0102]
类似于第1步,将(24)和(25)代入(23),可以得到
[0103][0104]
对上式进一步计算,得到
[0105][0106]
其中存在常数bi》0,使得bi《bi。
[0107]
让可以得到以下不等式
[0108][0109]
第n步:这是反推设计的最后一步,将估计的跟踪误差设计为其时间导数如下
[0110][0111]
在最后一步中出现了实际控制u,我们将控制函数u设计为
[0112][0113]
其中,γn》1是设计常数。
[0114]
现在,考虑如下lyapunov函数
[0115][0116]
对(31)求导,根据(6),(7)和(29)可得
[0117][0118]
将式(4)和(30)代入(32),可得
[0119][0120]
根据杨氏不等式和我们可以得到以下式子
[0121][0122][0123]
将(34)和(35)代入(33),得到
[0124][0125]
进一步计算,可得
[0126][0127]
其中,存在常数bn》0,使得bn《bn。
[0128]
令可以得到以下不等式
[0129][0130]
理论1:对于严格反馈非线性系统(1),基于假设1,参数自适应律(6)的状态观测器(5)和中间控制为(10)和(20)的控制器(30),可以保证:(1)闭环系统中的所有误差信号都是sguub;(2)系统输出能够以期望的精度跟踪参考信号yr(t)。
[0131]
证明:令a=min{a1,...,an},变成
[0132][0133]
上述不等式表示和是sguub;系统输出能够以期望的精度跟踪参考信号yr(t)。
[0134]
四:实验仿真
[0135]
应用matlab2018软件进行数值仿真。
[0136]
考虑下面的数值仿真系统:
[0137][0138]
其中u∈r为控制输入,x1(t)为可测量的输出状态,x2(t)为不可测量状态,初始值设置为x1(0)=0.5,x2(0)=1.2。yr(t)=5sin(0.5t)是参考信号。
[0139]
状态观测器:根据(5)和(6)构造神经网络状态观测器。(5)中的设计常数设计为k1=16,k2=22,(6)中的设计常数设计为σ1=0.4,σ2=1.6。观察状态的初始值分别设置为
[0140]
第1步:从(40)中,可以得到跟踪误差动态,
[0141][0142]
这一步中的神经网络被设计为12个节点,并且中心在间隔6到6中均匀分布,权重初始值为w
f1
(0)=[0.2,...,0.2]
t
∈r
12
×1。对应于虚拟控制器(10),设计参数为γ1=22。
[0143]
第2步:设置x2(0)=1.2为初始状态值。与步骤1类似,误差动态如下:,
[0144][0145]
该步骤中的神经网络设置16个节点,中心在间隔-8到8均匀分布,权重初始值为w
f2
(0)=[0.2,...,0.2]
t
∈r
16
×1。与实际控制器相对应,设计参数为γ2=36。
[0146]
本发明不局限于上述实施方式,任何人应得知在本发明的启示下作出的结构变化,凡是与本发明具有相同或相近的技术方案,均落入本发明的保护范围之内。
[0147]
本发明未详细描述的技术、形状、构造部分均为公知技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1