一种测功机铁地板自动调平方法与流程
1.本发明涉及测功机技术领域,具体涉及一种测功机铁地板自动调平方法。
背景技术:
2.测功机铁地板下4个角的空气弹簧由于铁地板上重物的重心分布不均,长时间使用会出现铁地板不平的现象,测功机运转时振动传感器监测值过大,长时间运转会导致测功机电机轴承损坏,更换轴承维修步骤复杂,维修时间长,成本高。目前要将4个角的空气弹簧调制水平一致,维修时需要下到铁地板地下,环境暗需要拿手电筒照亮,维修空间小,只能便于1个人维修,维修不方便,不安全。需要用扳手手动调整空气弹簧进气阀,保证4个角的空气弹簧进气压力一定,从而使4个空气弹簧保持水平一致,维修耗时长。
3.由于4个空气弹簧不水平一致,铁地板不平衡,导致测功机运转时震动传感器检测值过大造成系统停机,影响系统正常运转。或者由于其中空气弹簧进气压力过大,导致泄压阀打开,会产生很大漏气的噪音,同时也会导致空气弹簧顶出的高度过高,造成4个角的空气弹簧高度不一致,导致铁地板倾斜,目前试验室里面无法检测铁地板水平度,无法对空气弹簧故障进行判断,每次都是发生故障后手动对空气弹簧进气阀进行调节。
4.因此,现有的对空气弹簧调节方式的缺陷为:只能采取手动方式,且维修耗时长。
5.现有技术中,专利文献cn201390528y公开了“自动调平装置”,通过在桥台上设置接近开关和根据平台和桥台之间不同的高度差触发上述相应接近开关的触发装置。接近开关触发后产生信号,电控程序发出相应指令指示平台产生不同的动作,从而最终达到平台和桥台的自动调平。专利文献cn205076766u公开了“一种适用于工业车辆的自动调平装置”,提供一种适用于工业车辆的自动调平装置,可以自动检测出货叉的倾斜角度,并调节到水平或者安全角度范围内,保证货叉安全,并且在行驶过程中也可动态调节。
6.综上所述,现有的对空气弹簧调节方式只能采取手动方式,且维修耗时长。
技术实现要素:
7.本发明解决了现有的对空气弹簧调节方式只能采取手动方式,且维修耗时长的问题。
8.本发明所述的一种测功机铁地板自动调平方法,具体为:
9.若铁地板不倾斜,x-y轴数字角度尺返回来的数据都是0;
10.当四个支撑点压力不同时,x-y轴数字角度尺检测到铁地板x或y方向倾斜角度,将倾斜信号传输至arm处理器,如果x轴倾角为正值,y轴倾角为0,则左侧两个空气弹簧低,需要升高,或者右侧两个空气弹簧高需要降低;
11.具体升高或者是降低,根据伺服电机绝对编码器的位置确定,确保四个空气弹簧的调平旋钮处于中间位置。
12.进一步地,在本发明的一个实施例中,所述的x-y轴数字角度尺安装于铁地板的正中心的凹槽中。
13.进一步地,在本发明的一个实施例中,所述的x-y轴数字角度尺的x轴和y轴运用pid控制算法,通过调节pid的比例、积分和微分值来调节响应速度及输出值。
14.进一步地,在本发明的一个实施例中,所述的arm处理器为核心控制器,通过rs485串口采用modbus-rtu的方式与x-y轴数字角度尺进行通信,实时读取铁地板相对于水平面的角度值,通过采集的角度值在arm处理器中进行运算,根据运算结果确定出每个伺服应运转的位置。
15.进一步地,在本发明的一个实施例中,所述的arm处理器通过canopen的总线控制伺服电机动作,实现伺服的位置精确控制。
16.进一步地,在本发明的一个实施例中,所述的arm处理器通过高速计数器输入功能实现位置编码器的位置采集。
17.进一步地,在本发明的一个实施例中,所述的arm处理器通过模拟量电压信号的采集实现压缩空气的压力监测,实现气压的监测。
18.进一步地,在本发明的一个实施例中,所述的arm处理器通过rs485modbus通信与触摸屏进行通信,实现画面的显示。
19.进一步地,在本发明的一个实施例中,所述的伺服电机带动丝杆升降机构旋转实现上升下降功能。
20.进一步地,在本发明的一个实施例中,所述的伺服电机通过丝杆升降上升下降功能控制空气弹簧进气阀开度,调节气囊高度,使四个气囊恢复到相同高度,保证铁地板处于相对平衡的状态。
21.本发明解决了现有的对空气弹簧调节方式只能采取手动方式,且维修耗时长的问题。具体有益效果包括:
22.1、本发明所述的一种测功机铁地板自动调平方法,利用x-y轴数字角度尺检测铁地板水平状态,当四个支撑点压力不同时,x-y轴数字角度尺检将信号传输至arm处理器,arm处理器通过canopen总线控制伺服电机动作,带动丝杆升降机构旋转,控制空气弹簧进气阀,调节气囊高度,使四个气囊恢复到相同高度,保证铁地板处于相对平衡的状态。避免了测功机电机轴承损坏,节约了维修成本,大大降低测功机空气弹簧故障率。
23.2、本发明所述的一种测功机铁地板自动调平方法,利用伺服电机带动丝杆升降机对空气弹簧进气阀进行调节,实现了有效的精准调节。
24.3、本发明所述的一种测功机铁地板自动调平方法,arm处理器作为整个系统控制的核心,通过canopen的通信方式与伺服驱动器进行通信,可以实现伺服的位置精确控制,响应速度快。
附图说明
25.本发明上述的和/或附加的方面和优点从下面结合附图对实施例的描述中将变得明显和容易理解,其中:
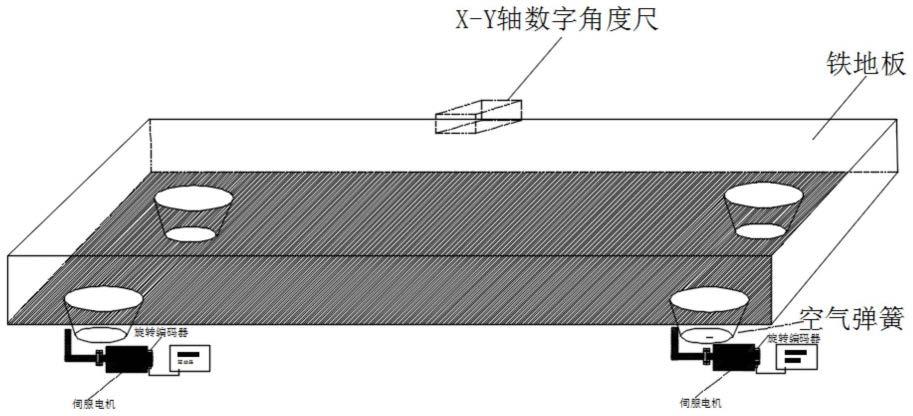
26.图1是具体实施方式所述的测功机铁地板自动调平图。
27.图2是具体实施方式所述的控制器图。
28.图3是具体实施方式所述的测功机铁地板自动调平图。
具体实施方式
29.下面结合附图将对本发明的多种实施方式进行清楚、完整地描述。通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
30.本实施方式所述的一种测功机铁地板自动调平方法,具体为:
31.若铁地板不倾斜,x-y轴数字角度尺返回来的数据都是0;
32.当四个支撑点压力不同时,x-y轴数字角度尺检测到铁地板x或y方向倾斜角度,将倾斜信号传输至arm处理器,如果x轴倾角为正值,y轴倾角为0,则左侧两个空气弹簧低,需要升高,或者右侧两个空气弹簧高需要降低;
33.具体升高或者是降低,根据伺服电机绝对编码器的位置确定,确保四个空气弹簧的调平旋钮处于中间位置。
34.本实施方式中,其特征在于,所述的x-y轴数字角度尺安装于铁地板的正中心的凹槽中。
35.本实施方式中,所述的x-y轴数字角度尺的x轴和y轴运用pid控制算法,通过调节pid的比例、积分和微分值来调节响应速度及输出值。
36.本实施方式中,所述的arm处理器为核心控制器,通过rs485串口采用modbus-rtu的方式与x-y轴数字角度尺进行通信,实时读取铁地板相对于水平面的角度值,通过采集的角度值在arm处理器中进行运算,根据运算结果确定出每个伺服应运转的位置。
37.本实施方式中,所述的arm处理器通过canopen的总线控制伺服电机动作,实现伺服的位置精确控制。
38.本实施方式中,所述的arm处理器通过高速计数器输入功能实现位置编码器的位置采集。
39.本实施方式中,所述的arm处理器通过模拟量电压信号的采集实现压缩空气的压力监测,实现气压的监测。
40.本实施方式中,所述的arm处理器通过rs485 modbus通信与触摸屏进行通信,实现画面的显示。
41.本实施方式中,所述的伺服电机带动丝杆升降机构旋转实现上升下降功能。
42.本实施方式中,所述的伺服电机通过丝杆升降上升下降功能控制空气弹簧进气阀开度,调节气囊高度,使四个气囊恢复到相同高度,保证铁地板处于相对平衡的状态。
43.本实施方式基于本发明所述的一种测功机铁地板自动调平方法,结合具体对象提供一种实际的实施方式:
44.使用arm处理器作为核心的控制器,如图1所示,利用x-y轴数字角度尺检测铁地板水平状态,当四个支撑点压力不同时,x-y轴数字角度尺检测到铁地板x或y方向倾斜角度,将信号传输至arm处理器,arm处理器接收到倾斜角度后进行运算,arm处理器通过canopen总线控制伺服电机动作,伺服电机带动丝杆升降机构旋转实现上升下降功能,通过丝杆升降机构控制空气弹簧进气阀开度,调节气囊高度,使四个气囊恢复到相同高度,保证铁地板处于相对平衡的状态。节约了维修成本,大大缩短了维修和保养时间,降低了空气弹簧的故障率。
45.如图2所示,arm处理器作为整个系统控制的核心,通过rs485串口采用modbus-rtu的方式与x-y轴数字角度尺进行通信,可以实时读取铁地板相对于水平面的角度值,通过采
集的角度值在arm处理器中进行运算,根据运算结果确定出每个伺服应运转的位置。
46.arm处理器作为整个系统控制的核心,通过canopen的通信方式与伺服驱动器进行通信,可以实现伺服的位置精确控制,响应速度快。
47.arm处理器通过高速计数器输入(ttl电平)功能实现位置编码器的位置采集。
48.arm处理器通过模拟量电压信号的采集实现压缩空气的压力监测,实现气压的监测。
49.arm处理器通过rs485 modbus通信与触摸屏进行通信,实现画面的显示。
50.如图3所示,具体的方案如下:
51.x-y轴数字角尺安装于铁地板的正中心的凹槽中,分别对x轴和y轴运用pid控制算法,通过调节pid的比例、积分、、微分的值来调节响应速度及输出值,通过输出值驱动伺服电机,通过减速机实现对空气弹簧调平旋钮进行调节,实现控制铁地板的平衡状态。正常如果铁地板不倾斜,x-y轴数字角度尺返回来的数据都是0,如果x轴倾角为正值,y轴倾角为0,则1号、3号空气弹簧低,需要升高,或者2号、4号空气弹簧高需要降低。具体升高或者是降低,根据伺服电机绝对编码器的位置确定,确保空气弹簧的调平旋钮处于一个中间位置。
52.以上对本发明所提出的一种测功机铁地板自动调平方法进行了详细介绍,本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1