一种模块化车辆拼接车组车辆主从控制方法及系统与流程
本发明涉及模块化车辆拼接,尤其涉及一种模块化车辆拼接车组车辆主从控制方法及系统。
背景技术:
1、传统地面装备,如发射车、雷达车、指挥车、电源车等,大多针对特定搭载对象定制设计,形态一经确定就用途固化,无法适应复杂多变的应用环境。其他类型的重载车辆也是如此,只能独立作业,无法和其他车辆进行拼接实现用途拓展。目前我国在军工、物流、化工等领域对于既能够通过拼接实现功能和性能拓展,又能够独立作业的模块化运载车辆的需求剧增,可靠的、智能化的模块化车辆拼接技术在我国还有较大的提升空间。
2、现有技术提供了模块化车辆的拼接技术,如采用电磁装置,由车组中的一车接收另一车的请求,在一车判断环境信息符合预设条件后,对另一车的车速等进行请求,在检测到电磁装置联通时,完成拼接。
3、现有技术并没有提供对于模块化拼接车组中主控车辆出现故障的处理方案,难以处理车组中主控车辆出现故障的情况。
技术实现思路
1、鉴于上述分析,本发明旨在提供一种模块化车辆拼接车组车辆主从控制方法及系统,以解决现有技术中存在的难以处理车组中主控车辆出现故障的情况的技术问题。
2、本发明提供的技术方案是:
3、一方面,本发明实施例提供一种模块化车辆拼接车组车辆主从控制方法,包括:
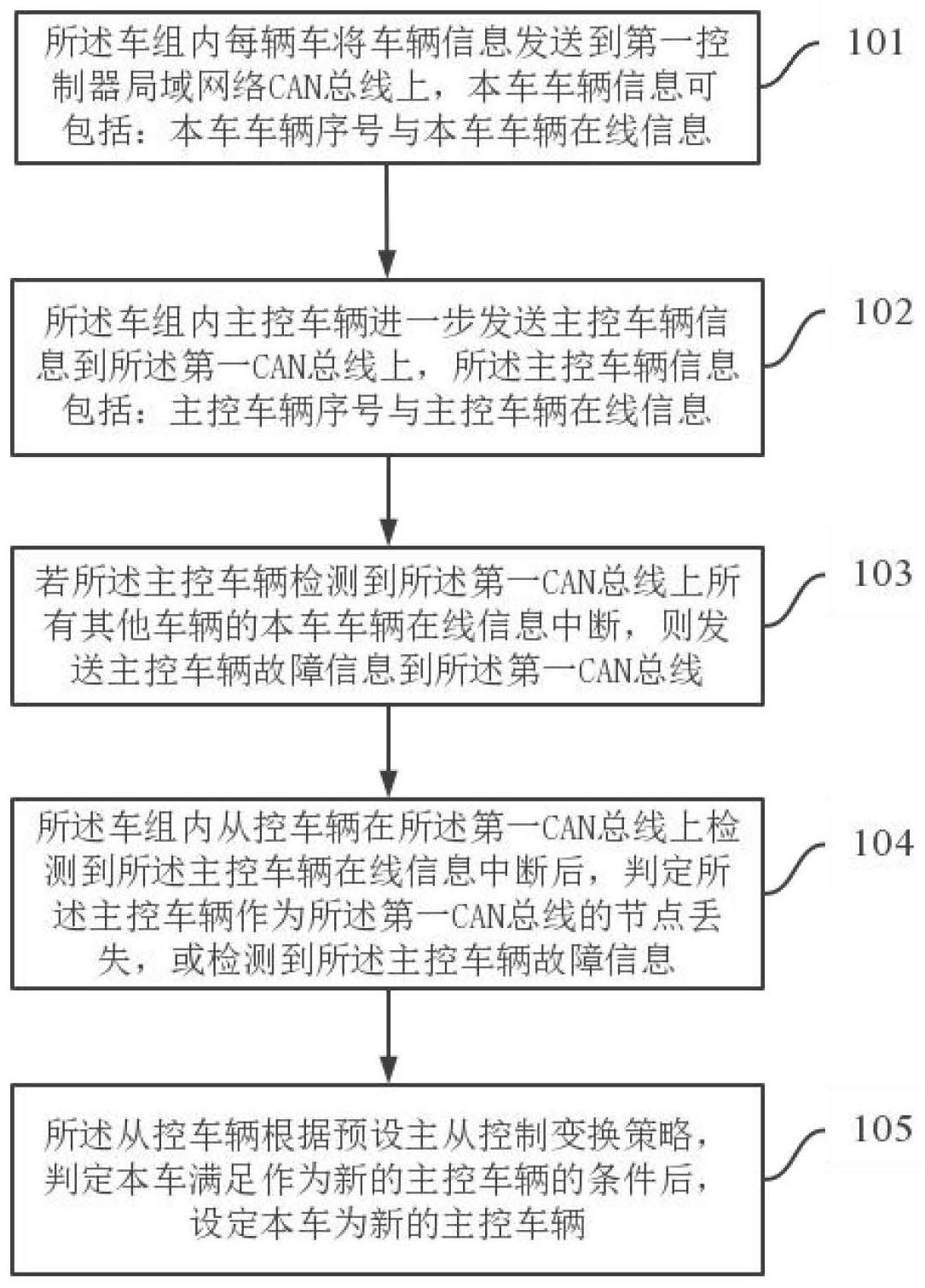
4、所述车组内每辆车将本车车辆信息发送到第一控制器局域网络can总线上,所述本车车辆信息包括:本车车辆序号与本车车辆在线信息;
5、所述车组内主控车辆进一步发送主控车辆信息到所述第一can总线上,所述主控车辆信息包括:主控车辆序号与主控车辆在线信息;
6、若所述主控车辆检测到所述第一can总线上所有其他车辆的本车车辆在线信息中断,则发送主控车辆故障信息到所述第一can总线;
7、所述车组内从控车辆在所述第一can总线上检测到所述主控车辆在线信息中断后,判定所述主控车辆作为所述第一can总线的节点丢失,或检测到所述主控车辆故障信息;
8、所述从控车辆根据预设主从控制变换策略,判定本车满足作为新的主控车辆的条件后,设定本车为新的主控车辆。
9、优选地,所述车组内每辆车将车辆信息发送到第一控制器局域网络can总线上包括:
10、所述每辆车利用预先分配的与每辆车车辆序号对应的第一类控制器局域网络标识符can id发送所述车辆信息;
11、所述车组内主控车辆进一步发送主控车辆信息到所述第一can总线上包括:
12、所述主控车辆利用预先分配的与主控车辆序号对应的第二类can id发送所述主控车辆信息。
13、优选地,所述本车车辆在线信息包括:与所述本车车辆序号对应的第一类can id的生命信息;
14、所述主控车辆在线信息包括:与所述主控车辆序号对应的第二类can id的生命信息。
15、优选地,对每辆车预设本车顶层控制源,所述每辆车与所述本车顶层控制源之间通过第二can总线连接。
16、优选地,所述主控车辆根据预设选择策略选定;
17、所述预设选择策略包括:
18、由预设主控顶层控制源指定主控车辆;所述主控顶层控制源从多个本车顶层控制源中选出;
19、所述方法还包括:
20、所述主控顶层控制源将主控车辆设定指示所指定的主控车辆序号通过所述第二can总线发送给对应的车辆,所述对应的车辆将所述主控车辆序号发生到所述第一can总线上;
21、每辆车从所述第一can总线上接收所述主控车辆序号,判断所述主控车辆序号是否为本车车辆序号,若是,判定本车为所述主控车辆;否则,判定本车为从控车辆;
22、或,所述主控车辆设定策略包括:
23、若所述主控顶层控制源不指定主控车辆,则预设车辆序号最大的尾车为主控车辆;
24、所述方法还包括:
25、所述每辆车根据所述主控车辆设定指示为空,判断本车是否是尾车,若是,进一步根据从所述第一can总线上获知的其他车辆的车辆序号,判断本车车辆序号是否最大,若是,则判定本车为所述主控车辆;否则,判定本车为所述从控车辆。
26、优选地,所述预设主从控制变换策略包括:
27、预设车辆序号最大的车辆为新的主控车辆;
28、所述从控车辆根据预设主从控制变换策略,判定本车满足作为新的主控车辆的条件包括:
29、所述从控车辆根据从所述第一can总线上检测到的其他车辆作为在线节点的车辆序号,判断本车车辆序号是否最大,若是,则判定本车为所述主控车辆;否则,判定本车为所述从控车辆。
30、优选地,所述车组内每辆车将本车车辆信息发送到第一can总线上后,所述方法还包括:
31、所述从控车辆检测到所述第一can总线上所述车组内所有其他车辆的can id全部丢失后,将本车动力扭矩清零,向所述第一can总线上报指示本车致命故障的故障信息;所述主控车辆检测到所述从控车辆上报的本车致命故障的故障信息后,判断上报本车致命故障的车辆数是否大于预设值,若是,判定车组致命故障,指示所有车辆动力扭矩清零;否则,指示其他车辆为上报本车致命故障的车辆提供动力;或,
32、所述主控车辆检测到所述第一can总线上从控车辆的can id的生命信息中断后,确定所述生命信息中断的can id对应的车辆作为所述can总线的节点丢失;所述主控车辆判断检测到的作为所述节点丢失的从控车辆的车辆数是否大于预设值,若是,判定车组致命故障,指示所有车辆动力扭矩清零;否则,指示其他车辆为上报本车致命故障的车辆提供动力。
33、优选地,所述主控车辆检测到所述第一can总线上所有其他车辆的本车车辆在线信息中断后,所述方法还包括:
34、所述主控车辆将本车动力扭矩清零。
35、另一方面,本发明实施例提供一种模块化车辆拼接车组车辆主从控制系统,包括:
36、多辆模块化车辆拼接成的车组、一根第一can总线,所述车组内每辆车各自连接所述第一can总线;
37、所述车组内每辆车,适于将车辆信息发送到第一控制器局域网络can总线上,所述车辆信息包括:本车车辆序号与本车车辆在线信息;
38、所述车组内主控车辆,进一步适于发送主控车辆信息到所述第一can总线上,所述主控车辆信息包括:主控车辆序号与主控车辆在线信息;
39、若所述主控车辆检测到所述第一can总线上所有其他车辆的本车车辆在线信息中断,则发送主控车辆故障信息到所述第一can总线;
40、所述车组内从控车辆,适于在所述第一can总线上检测到所述主控车辆在线信息中断后,判定所述主控车辆作为所述第一can总线的节点丢失,或检测到所述主控车辆故障信息;
41、所述从控车辆,进一步适于根据预设主从控制变换策略,判定本车满足作为新的主控车辆的条件后,设定本车为新的主控车辆。
42、优选地,所述系统还包括:与所述每辆车一一对应的多个顶层控制源;所述每辆车与对应的本车顶层控制源之间通过第二can总线连接;所述顶层控制源,适于指定主控车辆,将指示主控车辆序号的主控车辆设定指示通过所述第二can总线发送给对应车辆。
43、本发明实施例提供的技术方案中,利用第一can总线实现各个车辆之间的通信,由从控车辆检测主控车辆的在线情况或者故障情况,在主控车辆出现节点丢失的掉线情况或故障后,由从控车辆接管成为主控车辆,从而有效避免车组因无主控车辆而难以对车组进行相关控制的情况。
44、本发明实施例提供的技术方案中,每辆模块化车辆的配置可以完全相同,且每辆模块化车辆既可以独立工作,也可以在车辆软硬件不进行重大改变的情况下拼接成车组,并且不需要增加额外的调度中心,不需要增设移动网络,并可实现拼接车组中模块化车辆的主从控制,且具备主从控制权转移功能,在车组内部分车辆发生故障时车组仍能继续工作,具有很好的实用性,且方便易行。
45、本发明中,上述各技术方案之间还可以相互组合,以实现更多的优选组合方案。本发明的其他特征和优点将在随后的说明书中阐述,并且,部分优点可从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过说明书以及附图中所特别指出的内容中来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!