一种变电站巡检机器人图像二次精确对准方法
1.本发明涉及变电站运维技术领域,尤其涉及一种变电站巡检机器人图像二次精确对准方法。
背景技术:
2.变电站的巡检机器人在对电气设备进行常规检测时,巡检机器人在预定的巡检路线上前进,在预定的巡检点停留,然后对电气设备进行拍照,为了方便获取电气设备的状况,一般会预先在巡检点设置一个校准图像,而巡检机器人需要捕捉与校准图像一致的检测图像。
3.然而,巡检机器人停靠位置与标定位置间存在导航误差和机械误差,巡检机器人由于机械磨损导致行进的方向和路程与预定的存在偏差,也会使云台在调节相机的方向和位置存在一定的偏差,导致相机捕捉到的检测图像和校准图像存在偏差,导致加大对检测图像的分析量,甚至对电气设备的状况造成误判。
技术实现要素:
4.为了弥补现有技术缺陷,本发明的目的是提供一种变电站巡检机器人图像二次精确对准方法,通过对变电站巡检机器人的位姿和相机进行重新定位,然后对相机位姿进行纵向和横向的二次校准,补偿导航误差和机械磨损误差,使巡检机器人沿着巡检路线在巡检点停靠捕捉图像时,其巡检机器人位姿和相机位姿能够更靠近预定位姿,表现出高的精度和强的鲁棒性,保证捕捉到的画面与预定画面一致。
5.本发明提供如下技术方案:一种变电站巡检机器人图像二次精确对准方法,包括建立巡检机器人捕捉检测图像的误差模型;基于所述误差模型解耦三级pi对准策略;将相机进行主动重新定位校准。
6.作为本发明所述的变电站巡检机器人图像二次精确对准方法的一种优选方案:所述误差模型具体描述如下:将相机的当前位置看做一个在相机三维模型中的三维点xc,xc的三维坐标就为xc=(xc,yc,zc),xc的三维坐标的向量就为xc=(xc,yc,zc)
t
,在相机所在的三维模型中,也就是相机坐标系oc一xyz中,其对应的相机所拍摄平面图像的主点的像素点m的坐标的表达式为:
7.m=(u,v)
t
8.其中,m表示预定的相机所拍摄平面图像的主点的像素点,(u,v)表示预定的相机所拍摄平面图像的主点的像素点m的坐标,校准相机所拍摄的平面图像也就是校准由预定预定的相机所拍摄平面图像的主点的像素点的坐标,其计算表达式为:
[0009][0010]
其中,fu和fv分别表示相机所拍摄平面图像水平和垂直方向的比例系数,fu=fv时相机所拍摄平面图像为正方形,(u0,v0)表示当前相机所拍摄平面图像的主点的像素坐
标。
[0011]
作为本发明所述的变电站巡检机器人图像二次精确对准方法的一种优选方案:将相机预定的位置看做一个在变电站三维模型中的三维点实际的位置的误差向量为当前的底盘位姿底盘的位移误差向量th和当前的相机位姿可以得出校准状态下相机位姿和检测状态下的相机位姿的计算表达式为:
[0012][0013][0014]
然后,相机位姿的误差tc的计算表达式为:
[0015][0016]
其中,表示校准状态下相机位姿,表示检测状态下的相机位姿,表示检测状态下的相机位姿在调节前的位资,tc表示相机位姿的误差,r
cxrcy
表示相机对应预定拍摄画面的俯仰角度和旋转角度误差的正交矩阵,r
xry
是正交矩阵,分别对应于相机位姿pc的俯仰角θx和旋转角θy,t
hp
和t
pc
表示巡检机器人在巡检点的位置参数,表示当前的底盘位姿,表示当前相机位姿的向量,也就是当前相机位姿pc的俯仰角θx和旋转角θy的向量,th表示底盘的位移误差向量,tc=(t
cx
,t
cy
,t
cz
)
t
是相机的位移误差向量,(t
cx
,t
cy
,t
cz
)分别为变电站三维模型中的以相机为坐标系,其中相机所在位置的x轴、y轴和z轴的坐标参数。
[0017]
作为本发明所述的变电站巡检机器人图像二次精确对准方法的一种优选方案:所述相机实际所拍摄平面图像的主点的像素点m*=(u*,v*)
t
,对应于相机三维模型中的xc,其计算表达式为:
[0018][0019][0020][0021]
在变电站三维模型地图中巡检机器人的巡检路线可以看做一个平面,巡检点附近的路面看做绝对平面,因此巡检机器人底盘坐标系中底盘的y坐标恒定为0,t
hy
=0,可以得到:
[0022]
t
cz
=t
cy cot θ
x
[0023][0024]
其中,th表示底盘的位移误差向量,pc表示校准状态下相机位姿,表示拍摄状态下的相机位姿,p
p
表示云台位姿、ph表示校准状态下底盘位姿,t
hp
表示校准状态下巡检机器人的位姿变换矩阵,并且t
hp
=(1,t
hp
)和t
pc
=(1,t
pc
),其中t
hp
和t
pc
表示巡检机器人在巡检点的位置参数,r
xry
表示标准状态下的正交矩阵,分别对应于相机位姿pc的俯仰角θx和旋转角θy,表示拍摄状态下的相机在调节前的位资,tc表示相机位姿pc的误差,为拍摄状态下的正交矩阵,分别对应拍摄状态下位姿的俯仰角θx和旋转角θy,r
cxrcy
表示相机对应预定拍摄画面的俯仰角度和旋转角度误差的正交矩阵,t
hp
和t
pc
表示巡检机器人在巡检点的位置参数,表示拍摄状态下的底盘位姿,表示拍摄状态下巡检机器人的位姿变换矩阵,表示当前相机位姿的向量,也就是当前相机位姿pc的俯仰角θx和旋转角θy的向量,tc=(t
cx
,t
cy
,t
cz
)
t
是相机的位移误差向量,(t
cx
,t
cy
,t
cz
)分别为变电站三维模型中的以相机为坐标系,其中相机所在位置的x轴、y轴和z轴的坐标参数。
[0025]
作为本发明所述的变电站巡检机器人图像二次精确对准方法的一种优选方案:所述误差模型解耦三级pi控制包括:
[0026]
阶段1:对相机位姿ptz位姿矫正:
[0027]
首先通过pi控制器找到校准图像dc和实时检查图像dr之间的匹配点;
[0028]
然后,通过经典的5点算法和位姿求解算法,可以从ic和ir计算r
cxrcy
;
[0029]
对r
cxrcy
进行分解,可以得到俯仰和旋转角度的误差,其计算表达式为;
[0030][0031][0032]
其中r
cxrcy
代表矩阵,i
thjth
的第i行和第j列的元素,将δθ
x
和δθy通过乘以反雅各布矩阵j
θ
=diag(ω
x
,ωy)来转换为执行时间t
cx
和y
cy
,如下所示;
[0033]
[τ
cx
,τ
cy
]
t
=jθ[δθ
x
,δθy]
t
[0034]
其中,ωx和ωy表示云台的俯仰和旋转角速度,δθx和δθy是相机位姿ptz的俯仰和旋转角速度,pi控制器被用于产生执行时间tcx和ycy,直到||(θ
cx
,θ
cy
)||2≤εθ,表示相机位姿ptz校准完毕。
[0035]
作为本发明所述的变电站巡检机器人图像二次精确对准方法的一种优选方案:
[0036]
阶段2:对相机位姿ptz纵向平移矫正;
[0037]
由于相机位姿ptz的位姿误差被阶段1整顿,即r
cxrcy
=1,相机位姿ptz的δv对应的平移误差t
cy
和t
cz
,可作为已知常量,底盘的相应平移th计算表达式为:
[0038][0039][0040]
其中,arctan(t
hx
/t
hz
)=θ
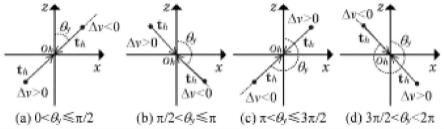
y or θy+π.,俯仰角θx∈(0,π/2),旋转角θy∈(0,2π),因此,sinθx》0,底盘的平移方向由θy和δv决定,基于不同条件所对应的arctan(thx/thz)的值,可以得到:
[0041][0042]
其中,当δv》0时,相机位姿ptz应向前位移,当δv《0时,应向后位移。
[0043]
这意味着在这个阶段,相机位姿ptz将被底盘纵向平移,同时pi控制器也被用于产生平移th,直到|δv|≤εv,表示相机位姿ptz在x轴方向上校准完毕。
[0044]
作为本发明所述的变电站巡检机器人图像二次精确对准方法的一种优选方案:
[0045]
阶段3:相机位姿ptz横向平移矫正,阶段1相同,对应于δu的平移th其计算表达式为:
[0046][0047][0048]
其中,th的方向是θy一π/2或θy+π/2,因此;
[0049][0050]
其中,当δu》0时,相机位姿ptz应向右平移,当δu《0时,相机位姿ptz应向左平移。
[0051]
在这个阶段,相机位姿ptz将被横向平移,然后再次应用pi控制器来产生平移h,直到|δu|≤εu,表示相机位姿ptz在y轴方向上校准完毕。
[0052]
本发明的有益效果:通过对变电站巡检机器人的位姿和相机进行重新定位,然后对相机位姿进行纵向和横向的二次校准,补偿导航误差和机械磨损误差,使巡检机器人沿着巡检路线在巡检点停靠捕捉图像时,其巡检机器人位姿和相机位姿能够更靠近预定位姿,表现出高的精度和强的鲁棒性,保证捕捉到的画面与预定画面一致。
附图说明
[0053]
图1为本发明一个实施例提供的一种变电站巡检机器人图像二次精确对准方法的
相机位姿ptz纵向平移的δy和δv所对应的th的方向示意图;
[0054]
图2为本发明一个实施例提供的一种变电站巡检机器人图像二次精确对准方法中相机位姿ptz横向平移的δy和δv所对应的th的方向示意图;
[0055]
图3为本发明一个实施例提供的一种变电站巡检机器人图像二次精确对准方法的为仿真比较结果图。
具体实施方式
[0056]
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合说明书附图对本发明的具体实施方式做详细的说明。
[0057]
实施例1
[0058]
参照图1和2,为本发明的一个实施例,提供了一种变电站巡检机器人图像二次精确对准方法,包括:
[0059]
s1:建立巡检机器人捕捉检测图像的误差模型;
[0060]
巡检机器人,由相机位姿ptz、路由器和底盘组成。相机位姿ptz配备了一个红外相机和一个高达32倍变焦的高清相机。高清相机的图像分辨率、主点、焦距fu分别为2688
×
1520、[1356.09、774.79]、2596.99。路由器用于将实时检测图像上传到上层计算机,接收并分发pt的控制命令,并分发相机位姿ptz和机箱的控制命令。
[0061]
所述误差模型具体描述如下:将相机的当前位置看做一个在相机三维模型中的三维点xc,xc的三维坐标就为xc=(xc,yc,zc),xc的三维坐标的向量就为xc=(xc,yc,zc)
t
,在相机所在的三维模型中,也就是相机坐标系oc一xyz中,其对应的相机所拍摄平面图像的主点的像素点m的坐标的表达式为:
[0062]
m=(u,v)
t
[0063]
其中,m表示预定的相机所拍摄平面图像的主点的像素点,(u,v)表示预定的相机所拍摄平面图像的主点的像素点m的坐标,校准相机所拍摄的平面图像也就是校准由预定预定的相机所拍摄平面图像的主点的像素点的坐标,其计算表达式为:
[0064][0065]
其中,fu和fv分别表示相机所拍摄平面图像水平和垂直方向的比例系数,fu=fv时相机所拍摄平面图像为正方形,(u0,v0)表示当前相机所拍摄平面图像的主点的像素坐标。
[0066]
用p表示巡检机器人的位姿,则可以一个两元组(r,t)来等价表示巡检机器人的位姿p,将tij=(rij,tij)表示从pi到pj的变换,即pj=tijpi,也就是巡检机器人的位姿p从i点到j点,在一个平面坐标系中其所在坐标的变换。
[0067]
巡检机器人的位姿包括底盘位姿、云台位姿和相机位姿。
[0068]
将摄像机预定的位置看做一个在变电站三维模型中的三维点xc的三维坐标就为xc=(xc,yc,zc),而三维点实际的位置的误差向量为摄像机实际所拍摄平面图像的主点的像素点m*=(u*,v*)
t
,对应于摄像机三维模型中的当前的位置
其计算表达式为:
[0069][0070][0071][0072]
在变电站三维模型地图中巡检机器人的巡检路线可以看做一个平面,巡检点附近的路面看做绝对平面,因此巡检机器人底盘坐标系中底盘的y坐标恒定为0,t
hy
=0,可以得到:
[0073]
t
cz
=t
cy cot θ
x
[0074][0075]
对应的标定图像中心点和巡检图像中心点之间的误差的坐标值向量δu和δv为:
[0076][0077][0078]
在变电站三维模型地图中巡检机器人需要拍摄的电气设备与摄像机之间的距离zc远大于巡检机器人底盘平移误差tc,也就是化简上式,得到:
[0079][0080]
巡检机器人的摄像机位姿pc的误差tc,其计算表达式为:
[0081][0082]
其中,zc表示巡检机器人需要拍摄的电气设备与摄像机之间的距离,tc表示巡检机器人底盘平移误差,fu和fv分别表示摄像机所拍摄平面图像水平和垂直方向的比例系数,fu=fv时摄像机所拍摄平面图像为正方形,其中zc、δu和δv是未知的,只有fu、fv、θx是已知量,
[0083]
为了获取δu和δv,具体来说,在校准状态下的三维点xc选择在摄像机的光轴上,即xc=(0,0,zc)t,m=(u0,v0)t,以xc为中心,建立一个边长为2w的虚拟正方形虚拟正方形位于距离相机平面距离为zc=fu的正方形平面,其边长为2w,中心点的相机坐标系三维坐标为xc=[0,0,z_c],图像中二维坐标为m=[u0,v0]t,正方形的四个顶点三维坐标式为:
[0084][0085]
校准图像中对应于的像素点的坐标是:
[0086][0087]
通过图像配准方法得到标定图像与巡检图像的像素同源矩阵h,将正校准图像中对应于的像素点的坐标乘以像素同源矩阵h,得到一个新的正方形以及对应的四个顶点,其关系为:
[0088][0089]
基于同源变换的平面特性,计算新的正方形的两条对角线的交点,得到δu和δv。
[0090]
底盘位姿表示巡检机器人在预定的巡检路线上的预定停留位置,也就是巡检点的停留位置,一般巡检点是一个巡检停留的区域,略大于巡检机器人在地面上的垂直投影面积,可参照生活中汽车与停车位的大小关系,只要巡检机器人进入此区域就代表巡检机器人进入预定停留位置;云台位姿表示巡检机器人上的云台的位姿,云台是安装、固定相机的支撑设备,它分为固定和电动云台两种,固定云台适用于监视范围不大的情况,在固定云台上安装好相机后可调整相机的水平和俯仰的角度;相机位姿包括相机水平、垂直和焦距的位姿,水平位姿表示水平方向上移动,即相机的旋转,垂直位姿表示垂直方向上的移动,即相机镜头的高低俯仰,焦距的位姿表示变焦,即调整相机的焦距,相机优选采用高分辨率相机。
[0091]
检测机器人工作拍照时有两种工作状态,即校准状态和检测状态,在校准状态下,底盘位姿和相机位姿之间的转换被表示为:
[0092]
p
p
=t
hp
ph=(r
xry
,t
hp
)
[0093]
其中,p
p
表示云台位姿、ph表示底盘位姿,t
hp
表示巡检机器人的位姿变换矩阵,并且t
hp
=(1,t
hp
)和t
pc
=(1,t
pc
),其中t
hp
和t
pc
表示巡检机器人在巡检点的位置参数,其中ph被认为是固定的已知参数,r
xry
是正交矩阵,分别对应于相机位姿pc的俯仰角θx和旋转角θy,正交矩阵的计算表达式为:
[0094][0095][0096]
应该注意的是,θx和θy在每个预设的巡检点是已知参数,而相机的焦距目前的相机都有自动变焦对焦的功能,在本模型中是作为一个忽略的常量。
[0097]
在检查状态下,底盘位姿ph和表示相机位姿,pc的角度偏离校准,这意味着当前的底盘位姿计算表达式为:
[0098]
ph表示底盘位姿,p
p
表示云台位姿、ph表示底盘位姿,
[0099][0100][0101]
其中,表示当前的底盘位姿,也就是巡检小车目前所在的位姿,th表示底盘的位移误差向量,则th=(t
hx
,t
hy
,t
hz
)
t
,也就是巡检小车从上一个巡检点到下一个预定的巡检点之间的位移与实际到达的下一个预定的巡检点误差向量,(t
hx
,t
hy
,t
hz
)分别为变电站三维模型中,以巡检小车为坐标系,其中巡检小车所在位置的x轴、y轴和z轴的坐标参数,表示当前的相机位姿。
[0102]
当前的底盘位姿底盘的位移误差向量th和当前的相机位姿可以得出校准状态下相机位姿和检测状态下的相机位姿的计算表达式为:
[0103][0104][0105]
然后,相机位姿的误差tc的计算表达式为:
[0106][0107]
将相机预定的位置看做一个在变电站三维模型中的三维点实际的位置的误差向量为当前的底盘位姿底盘的位移误差向量th和当前的相机位姿可以得出校准状态下相机位姿和检测状态下的相机位姿的计算表达式为:
[0108][0109][0110]
然后,相机位姿的误差tc的计算表达式为:
[0111]
[0112]
相机实际所拍摄平面图像的主点的像素点m*=(u*,v*)
t
,对应于相机三维模型中的xc,其计算表达式为:
[0113][0114][0115][0116]
在变电站三维模型地图中巡检机器人的巡检路线可以看做一个平面,巡检点附近的路面看做绝对平面,因此巡检机器人底盘坐标系中底盘的y坐标恒定为0,t
hy
=0,可以得到:
[0117]
t
cz
=t
cy cot θ
x
[0118][0119]
其中,th表示底盘的位移误差向量,pc表示校准状态下相机位姿,表示拍摄状态下的相机位姿,p
p
表示云台位姿、ph表示校准状态下底盘位姿,t
hp
表示校准状态下巡检机器人的位姿变换矩阵,并且t
hp
=(1,t
hp
)和t
pc
=(1,t
pc
),其中t
hp
和t
pc
表示巡检机器人在巡检点的位置参数,r
xry
表示标准状态下的正交矩阵,分别对应于相机位姿pc的俯仰角θx和旋转角θy,表示拍摄状态下的相机在调节前的位资,tc表示相机位姿pc的误差,为拍摄状态下的正交矩阵,分别对应拍摄状态下位姿的俯仰角θx和旋转角θy,r
cxrcy
表示相机对应预定拍摄画面的俯仰角度和旋转角度误差的正交矩阵,t
hp
和t
pc
表示巡检机器人在巡检点的位置参数,表示拍摄状态下的底盘位姿,表示拍摄状态下巡检机器人的位姿变换矩阵,表示当前相机位姿的向量,也就是当前相机位姿pc的俯仰角θx和旋转角θy的向量,tc=(t
cx
,t
cy
,t
cz
)
t
是相机的位移误差向量,(t
cx
,t
cy
,t
cz
)分别为变电站三维模型中的以相机为坐标系,其中相机所在位置的x轴、y轴和z轴的坐标参数。
[0120]
s2:基于误差模型解耦三级pi对准策略,对相机进行主动重新定位校准。为了准确的控制巡检机器人以纠正估计的相机位姿误差tc,需要设计一个相机位姿误差控制策略,解耦三级pi对准策略对机械磨损具有鲁棒性,对机械磨损造成的误差进行补偿,以便于相机捕捉的检测图像与预定的检测图像一致
[0121]
为了使问题能够得到解决,根据变电站的空间结构,合理地假设如下。
[0122]
假设1:巡检点附近的路面是绝对的平面,即t
hy
=0。(路面并不是绝对的平面,有时底盘的初始平移误差可能不会比现实世界中的zc小很多。)
[0123]
假设2:从电气设备到高相机之间的距离远远大于底盘的初始平移误差,即zc>>||th||2。
[0124]
误差模型解耦三级pi控制包括:
[0125]
阶段1:对相机位姿ptz位姿矫正:
[0126]
首先通过加速鲁棒特征找到校准图像dc和实时检查图像dr之间的匹配点;
[0127]
然后,通过经典的5点算法和位姿求解算法,可以从ic和ir计算r
cxrcy
;
[0128]
对r
cxrcy
进行分解,可以得到俯仰和旋转角度的误差,其计算表达式为;
[0129][0130][0131]
其中r
cxrcy
代表矩阵,i
thjth
的第i行和第j列的元素,将δθ
x
和δθy通过乘以反雅各布矩阵j
θ
=diag(ω
x
,ωy)来转换为执行时间t
cx
和y
cy
,如下所示;
[0132]
[τ
cx
,τ
cy
]
t
=j
θ
[δθ
x
,δθy]
t
[0133]
其中,ωx和ωy表示云台的俯仰和旋转角速度,δθx和δθy是相机位姿ptz的俯仰和旋转角速度,此价段相机位姿ptz将被底盘纵向平移。与阶段1类似,考虑到机械磨损和图像登记误差,pi控制器被用于产生执行时间tcx和ycy,直到||(θ
cx
,θ
cy
)||2≤εθ,表示相机位姿ptz校准完毕。
[0134]
阶段2:对相机位姿ptz纵向平移矫正;
[0135]
请参阅图1,由于相机位姿ptz的位姿误差被阶段1整顿,即r
cxrcy
=1,相机位姿ptz的δv对应的平移误差t
cy
和t
cz
,可作为已知常量,底盘的相应平移th计算表达式为:
[0136][0137][0138]
其中,arctan(t
hx
/t
hz
)=θ
y or θy+π.,俯仰角θx∈(0,π/2),旋转角θy∈(0,2π),因此,sinθx》0,底盘的平移方向由θy和δv决定,基于不同条件所对应的arctan(thx/thz)的值,可以得到:
[0139][0140]
其中,当δv》0时,相机位姿ptz应向前位移,当δv《0时,应向后位移。
[0141]
这意味着在这个阶段,相机位姿ptz将被底盘纵向平移,同时pi控制器也被用于产生平移th,直到|δv|≤εv,表示相机位姿ptz在x轴方向上校准完毕。
[0142]
阶段3:相机位姿ptz横向平移矫正,
[0143]
请参阅图2,与阶段1相同,对应于δu的平移th其计算表达式为:
[0144][0145][0146]
其中,th的方向是θy一π/2或θy+π/2,因此;
[0147][0148]
其中,当δu》0时,相机位姿ptz应向右平移,当δu《0时,相机位姿ptz应向左平移。
[0149]
在这个阶段,相机位姿ptz将被横向平移,然后再次应用pi控制器来产生平移h,直到|δu|≤εu,表示相机位姿ptz在y轴方向上校准完毕。
[0150]
通过对变电站巡检机器人的位姿和相机进行重新定位,然后对相机位姿ptz进行纵向和横向的二次校准,补偿导航误差和机械磨损误差,使巡检机器人沿着巡检路线在巡检点停靠捕捉图像时,其巡检机器人位姿和相机位姿能够更靠近预定位姿,表现出高的精度和强的鲁棒性,保证捕捉到的画面与预定画面一致。
[0151]
实施例2
[0152]
参照图3,为本发明另一个实施例,该实施例不同于第一个实施例的是,提供了一种变电站巡检机器人图像二次精确对准方法的实验验证,为对本方法中采用的技术效果加以验证说明,本实施例采用传统技术方案与本发明方法进行对比测试,以科学论证的手段对比试验结果,以验证本方法所具有的真实效果。
[0153]
为了定量评估不同方法捕获的校准和检查图像之间的一致性,我们提出了两个指标,即图像覆盖率和平均密集的光学流动(adof)。图像覆盖率被定义为检查和校准图像之间的重叠像素数与图像分辨率的比率。而adof的定义是:
[0154][0155]
其中,m
×
n=2688
×
1520是图像分辨率,代表由farneback算法计算的密集光流,是校准图像和同位素转换后的检查图像。显然,图像覆盖率越高,adof越小,校准和检查图像就越一致。
[0156]
图3为仿真比较结果图。acr、crp和apr方法在10个校准点上的(a)位移误差、(b)迭代次数、(c)运行时间、(d)图像覆盖率、(e)adof、(f)au和(g)au的博列表。(a)显示,apr实现了最小的位移误差,中值为8.13毫米,比acr和crp的精度高一个数量级。从图中可以发现,我们的apr方法的运行时间在60秒以内,比acr和crp快,而且检测图像对预定图像的覆盖率。
[0157]
尽管apr似乎需要更多的迭代次数。之所以apr需要更多的迭代,但消耗的运行时间较少,是因为在整个apr控制过程中,底盘只需要转两圈,在每次迭代平移过程中只需要向前或向后移动,而由于摄像机位姿ptz摄像机的平移依赖于底盘的运动,在acr和crp策略
中,底盘需要转一圈,然后在每次迭代更新摄像机矢量时向前或向后移动,这很耗费时间,而且降低了平移的稳健性。考虑到常规变电站检测任务的重点是重新定位的准确性和图像质量,而不是检测时间,apr的运行时间性能是可以接受的。此外,如图3(d)至(g)所示,apr捕获的校准图像和检查图像之间的覆盖率和像素偏差比acr和crp方法更好,这意味着apr获得的检查图像与校准图像最一致。观察每张图表中的数据分布,我们可以发现apr方法是最准确和最稳健的综合方法。仿真结果验证了apr可以实现比其他策略更简单的控制,以纠正变电站检测机器人的位移误差。
[0158]
应说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的精神和范围,其均应涵盖在本发明的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1