一种减弱大流量轨控喷流干扰力矩的控制方法与流程
1.本发明一种减弱大流量轨控喷流干扰力矩的控制方法,属于流动控制技术领域。
背景技术:
2.喷流控制技术是通过喷流反作用力直接改变飞行器飞行轨迹或姿态的主动流动控制技术,具有响应速度快、不受空域和速域限制、控制精度高等优点。未来发展的高超声速飞行器,其飞行范围涉及低空到高空,覆盖稠密大气一直到稀薄大气环境。不同环境下气动力变化范围大,需使用大流量轨控发动机提供的直接力进行机动变轨,达到高精度与快响应的能力。
3.大流量轨控喷流干扰会产生很大的干扰力矩,国内外往往采用姿控发动机进行控制。但在某些条件下(如低空、高马赫数的飞行条件)轨控喷流干扰会产生很大的干扰力矩,姿控发动机控制能力很难进行飞行器的稳定控制,因此需要额外采用控制方法,进一步对干扰力矩进行控制。
技术实现要素:
4.本发明的目的在于克服现有技术的上述缺陷,提供一种减弱大流量轨控喷流干扰力矩的控制方法,通过在飞行器模型尾裙迎风面的合适位置布置凸起物,凸起物在尾裙上诱导的局部高压提供俯仰力矩,能够减小轨控干扰影响,提高拦截导弹稳定性。
5.本发明的上述目的主要是通过如下技术方案予以实现的:
6.一种减弱大流量轨控喷流干扰力矩的控制方法,包括,
7.建立飞行器模型,
8.在飞行器模型尾裙迎风面位置布置凸起物,或,
9.首先采用姿控发动机进行姿控喷流干扰控制,然后在飞行器模型尾裙迎风面位置布置凸起物。
10.在上述减弱大流量轨控喷流干扰力矩的控制方法中,所述凸起物布置在飞行器模型尾裙迎风面的表面流动再附线位置处。
11.在上述减弱大流量轨控喷流干扰力矩的控制方法中,所述凸起物布置位置的确定包括:
12.采用数值模拟方法获得飞行器模型的喷流干扰流场的空间速度,根据所述空间速度得到喷流干扰流场的流线,并从所述流线中提取出飞行器模型表面极限流线;
13.利用所述飞行器模型表面极限流线获得飞行器模型尾裙迎风面的表面流动再附线位置,即凸起物的布置位置。
14.在上述减弱大流量轨控喷流干扰力矩的控制方法中,采用数值模拟方法获得飞行器模型的喷流干扰流场的空间速度包括:
15.所述飞行器模型为锥柱裙轨控喷流模型,通过对三维可压缩navier-stokes方程求解,获得飞行器模型的喷流干扰流场的空间速度。
16.在上述减弱大流量轨控喷流干扰力矩的控制方法中,通过对三维可压缩navier-stokes方程求解,获得飞行器模型的喷流干扰流场的的空间速度的方法包括:
17.(1)三维可压缩navier-stokes方程为:
[0018][0019]
其中,为守恒变量,分别为坐标系x,y,z三个方向上的无粘通量矢量,分别为坐标系x,y,z三个方向上的粘性通量矢量;t为时间,x为坐标系流向,y为坐标系法向,z为坐标系周向;
[0020]
其中坐标系的定义为:采用三维笛卡尔直角坐标系,x轴沿模型流向,y轴沿法向,z轴沿周向,坐标原点o选取为飞行器模型前缘中点;
[0021]
(2)求解所述三维可压缩navier-stokes方程,得到守恒变量获得喷流干扰流场的的空间速度u、v、w;其中u为流向速度,v为法向速度,w为周向速度。
[0022]
在上述减弱大流量轨控喷流干扰力矩的控制方法中,所述凸起物沿周向环绕飞行器模型尾裙表面部分区域,环绕区域的弧心角为30
°
~60
°
。
[0023]
在上述减弱大流量轨控喷流干扰力矩的控制方法中,所述凸起物的高度h满足:
[0024]
h/d=0.01~0.1,
[0025]
其中:d代表飞行器模型尾裙直径。
[0026]
在上述减弱大流量轨控喷流干扰力矩的控制方法中,所述凸起物的宽度w满足:
[0027]
w/d=0.01~0.1,
[0028]
其中:d代表飞行器模型尾裙直径。
[0029]
在上述减弱大流量轨控喷流干扰力矩的控制方法中,当凸起物产生的控制力矩大于或等于轨控发动机干扰力矩时,在飞行器模型尾裙迎风面位置布置凸起物进行干扰力矩的控制;
[0030]
当凸起物产生的控制力矩小于轨控发动机干扰力矩情况下,首先采用姿控发动机进行姿控喷流干扰控制,然后在飞行器模型尾裙迎风面位置布置凸起物。
[0031]
在上述减弱大流量轨控喷流干扰力矩的控制方法中,表征凸起物控制效果的俯仰力矩控制效率η表示如下:
[0032][0033]
其中:δmz
凸起物
代表施加凸起物模型轨控喷流引起的俯仰干扰力矩,δmz代表无凸起物模型轨控喷流引起的俯仰干扰力矩,
[0034]
η=0代表凸起物无任何控制作用;
[0035]
η》0代表凸起物产生了不利控制;
[0036]-1《η《0代表凸起物产生了有利控制,且η越小凸起物产生的控制效率越高;
[0037]
η=-1代表凸起物产生的俯仰干扰力矩完全抵消了喷流干扰流场的不利影响。
[0038]
本发明与现有技术相比具有如下有益效果:
[0039]
(1)、本发明提供一种减弱大流量轨控喷流干扰力矩的控制方法,通过在飞行器模型尾裙迎风面的合适位置布置凸起物,凸起物在尾裙上诱导的局部高压提供俯仰力矩,能
够减小轨控干扰影响,提高拦截导弹稳定性。
[0040]
(2)、本发明通过优化设计及大量试验验证确定凸起物的布置在飞行器模型尾裙迎风面的表面流动再附线位置处,使得凸起物产生有利控制。
[0041]
(3)、本发明通过优化设计确定凸起物沿周向环绕飞行器模型尾裙部分的角度以及凸起物的高度和宽度,使得凸起物控制效率显著提高。
[0042]
(4)、本发明可以根据需要直接在飞行器模型尾裙迎风面位置布置凸起物进行干扰力矩控制,或者首先采用姿控发动机进行姿控喷流干扰控制,然后在飞行器模型尾裙迎风面位置布置凸起物,可以根具不同情况进行选择,实现轨控干扰力矩影响的有效控制。
[0043]
(5)、本发明与姿控发动机控制方法相比,不需要额外的能量输入,并且结构简单,更容易实现,也可作为姿控发动机控制方法的一种补充。
附图说明:
[0044]
图1为本发明提供的减弱大流量轨控喷流干扰力矩的控制方法流程图;
[0045]
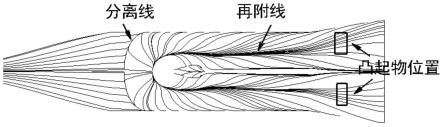
图2为本发明提供的喷流干扰流场表面极限流线及凸起物布置位置示意图;
[0046]
图3为本发明提供的随凸起物高度增加俯仰力矩控制效率变化示意图。
具体实施方式
[0047]
下面结合附图和具体实施例对本发明作进一步详细的描述:
[0048]
如图1为本发明提供的减弱大流量轨控喷流干扰力矩的控制方法流程图,本发明减弱大流量轨控喷流干扰力矩的凸起物流动控制方法包括如下步骤:
[0049]
(1)建立飞行器模型,例如可以采catia等三维实体建模建立模型。一可选实施例中,建立的飞行器模型为锥柱裙轨控喷流模型。
[0050]
(2)采用数值模拟方法获得飞行器模型的喷流干扰流场的空间速度,根据所述空间速度得到喷流干扰流场的流线,并从所述流线中提取出飞行器模型表面极限流线。
[0051]
一可选实施例中,通过对三维可压缩navier-stokes方程求解,获得飞行器模型的喷流干扰流场。
[0052]
三维可压缩navier-stokes方程为
[0053][0054]
其中,为守恒变量,分别为坐标系x,y,z三个方向上的无粘通量矢量,分别为坐标系x,y,z三个方向上的粘性通量矢量;t为时间,x为坐标系流向,y为坐标系法向,z为坐标系周向;
[0055]
其中坐标系的定义为:采用三维笛卡尔直角坐标系,x轴沿模型流向,y轴沿法向,z轴沿周向,坐标原点o选取为飞行器模型前缘中点。
[0056]
求解所述三维可压缩navier-stokes方程,得到守恒变量进而获得喷流干扰流场的的空间速度u、v、w。
[0057][0058]
其中:ρ表示密度,u、v、w分别表示流向速度、法向速度和周向速度,e表示单位质量流体能量。
[0059]
一可选实施例中,可以通过商用流体仿真软件求解,时间离散格式可以采用lu-sgs,空间离散格式可以采用roe格式,湍流模型可以选用s-a模型。
[0060]
(3)如图2所示为本发明提供的喷流干扰流场表面极限流线及凸起物布置位置示意图;利用步骤(2)得到的飞行器模型表面极限流线获得飞行器模型尾裙迎风面的表面流动再附线位置,即凸起物的布置位置。
[0061]
(4)进一步可以对凸起物的结构形式和尺寸进行优化设计,使得对干扰力矩的控制方法达到最优。其中对凸起物的结构形式和尺寸进行的优化设计也可以通过数值模拟方法进行验证或设计。
[0062]
一可选实施例中,凸起物沿周向环绕飞行器模型尾裙表面部分区域,环绕区域的弧心角为30
°
~60
°
。
[0063]
一可选实施例中,凸起物的高度h满足:
[0064]
h/d=0.01~0.1,
[0065]
其中:d代表飞行器模型尾裙直径。
[0066]
一可选实施例中,凸起物的宽度w满足:
[0067]
w/d=0.01~0.1,
[0068]
其中:d代表飞行器模型尾裙直径。
[0069]
以上为当凸起物产生的控制力矩大于或等于轨控发动机干扰力矩的情况下,在飞行器模型尾裙迎风面位置布置凸起物进行干扰力矩的控制方法。
[0070]
当凸起物产生的控制力矩小于轨控发动机干扰力矩的情况下,本发明提供了另外一种减弱大流量轨控喷流干扰力矩的控制方法,具体包括:
[0071]
(1)首先采用姿控发动机进行姿控喷流干扰控制,
[0072]
(2)在飞行器模型尾裙迎风面位置布置凸起物,具体方法同上面对第一种情况的描述,包括:
[0073]
(2.1)建立飞行器模型,例如可以采catia等三维实体建模建立模型。一可选实施例中,建立的飞行器模型为锥柱裙轨控喷流模型。
[0074]
(2.2)采用数值模拟方法获得飞行器模型的喷流干扰流场,并从喷流干扰流场中提取飞行器模型表面极限流线。
[0075]
(2.3)利用步骤(2.2)得到的飞行器模型表面极限流线获得凸起物的布置位置,即凸起物的布置位置为飞行器模型尾裙迎风面的表面流动再附线位置.
[0076]
(2.4)进一步可以对凸起物的结构形式和尺寸进行优化设计,使得对干扰力矩的控制方法达到最优。
[0077]
进一步,表征凸起物控制效果的俯仰力矩控制效率η表示如下:
[0078][0079]
其中:δmz
凸起物
代表施加凸起物模型轨控喷流引起的俯仰干扰力矩,δmz代表无凸起物模型轨控喷流引起的俯仰干扰力矩,
[0080]
η=0代表凸起物无任何控制作用;
[0081]
η》0代表凸起物产生了不利控制;
[0082]-1《η《0代表凸起物产生了有利控制,且η越小凸起物产生的控制效率越高;
[0083]
η=-1代表凸起物产生的俯仰干扰力矩完全抵消了喷流干扰流场的不利影响。
[0084]
实施例1
[0085]
本实施例中针对一种典型锥柱裙轨控喷流模型进行控制,飞行马赫数8.0,飞行高度20km,攻角-4
°
,轨控喷流推力为6600n,控制目标为轨控喷流产生的俯仰干扰力矩减小20%,经多轮优化计算,如图3所示为本发明实施例提供的随凸起物高度增加俯仰力矩控制效率变化示意图,,最终满足设计要求的凸起物为:h/d=0.05,w/d=0.03,周向范围弧心角角度为30
°
,在此种情况下,轨控喷流引起的干扰力矩减小了23.16%。
[0086]
其中h代表凸起物高度,w代表凸起物宽度,d代表弹体裙尾直径。
[0087]
以上所述,仅为本发明最佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。
[0088]
本发明说明书中未作详细描述的内容属于本领域专业技术人员的公知技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1