一种海域自动避障方法及装置与流程
本发明涉及海洋石油勘探,特别涉及一种海域自动避障方法及装置。
背景技术:
1、海洋勘探时会遇到各种类型的障碍物,包括海岸线、钻井平台、珊瑚保护区及岛屿等,这些障碍物给施工造成一定影响,震源船、节点船和拖缆船在作业时都需要避开影响施工的障碍物,但船只作业时在保障安全的情况下,又需要尽可能靠近障碍物区域,以避免因船只避障而造成覆盖范围缺失进而影响勘探的效果。
2、因此,在勘探和施工作业过程中,如何合理的避开障碍物,又尽可能的不造成覆盖范围缺失,是复杂海洋领域中自动避障的迫切需要解决的技术问题,传统避障方式往往是不考虑各种参数的影响,将航行路线调整到能绕开障碍物的区域,同时把障碍物区域内的炮点及检点横向移到障碍物区域外,或进行手工避障,人工调整航行路线和炮点、检点位置。
技术实现思路
1、本技术发明人发现,海洋避障因船的速度、转弯半径、船只的宽度,清炮距离等参数影响,如果使用传统的避障方式,在海洋勘探的过程中往往会造成因船只转弯半径不够而形成安全隐患或由于避障范围过大而使勘探覆盖范围缺失等问题,手工避障需要人工拓绘和手动调整航迹图,费时费力避障效果差。
2、鉴于上述问题,提出了本发明以便提供一种克服上述问题或者至少部分地解决上述问题的一种海域自动避障方法和装置。
3、第一方面,本发明实施例提供一种海域自动避障方法,包括:
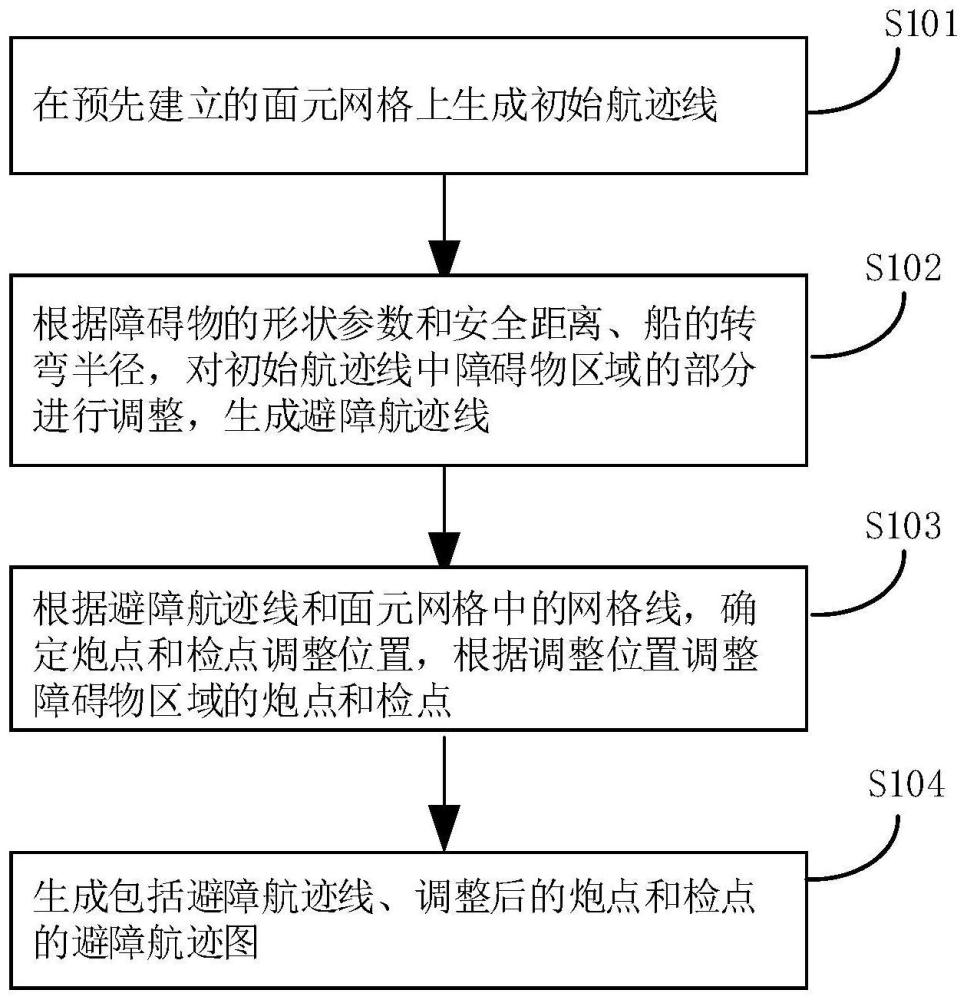
4、在预先建立的面元网格上生成初始航迹线;
5、根据障碍物的形状参数和安全距离、船的转弯半径,对初始航迹线中障碍物区域的部分进行调整,生成避障航迹线;
6、根据避障航迹线和面元网格中的网格线,确定炮点和检点调整位置,根据调整位置调整障碍物区域的炮点和检点;
7、生成包括避障航迹线、调整后的炮点和检点的避障航迹图。
8、在一些可选的实施例中,所述在预先建立的面元网格上生成初始航迹线,包括:
9、根据船的气源枪源数,获得每个气源枪形成的炮线;
10、根据所述炮线确定航迹中心线,根据扩展器的间距确定航迹宽度,根据所述航迹中心线和航迹宽度在面元网格上生成初始航迹线。
11、在一些可选的实施例中,所述根据障碍物的形状参数和安全距离、船的转弯半径,对初始航迹线中障碍物区域的部分进行调整,生成避障航迹线,包括:
12、根据障碍物的形状参数,确定初始航迹线和障碍物的位置关系;
13、根据所述位置关系从障碍物的端点中选择避障安全区域顶点,以避障安全区域顶点为圆心,以安全距离为半径,生成安全距离圆,以转弯半径为半径,建立避障内切圆,所述安全距离圆内切于所述避障内切圆;
14、以转弯半径为半径建立所述避障内切圆和初始航迹线的两个避障外切圆;
15、根据所述避障内切圆和避障外切圆调整初始航迹线,得到避障航迹线。
16、在一些可选的实施例中,根据所述位置关系从障碍物的端点选择避障安全区域顶点,包括:
17、根据初始航迹线和障碍物重心点的位置关系,确定避障航迹避让方向;
18、根据避让方向,从障碍物靠近避让方向的一端的端点选择最左顶点、最右顶点和最左顶点与最右顶点之间的离初始航迹线最远的至少一个最高顶点,作为避障安全区域顶点。
19、在一些可选的实施例中,根据所述避障内切圆和避障外切圆调整初始航迹线,得到避障航迹线,包括:
20、从第一避障外切圆上获取第一避障外切圆与初始航迹线切点到第一避障外切圆与避障内切圆切点之间第一段圆弧;
21、从避障内切圆上获取第一避障外切圆与避障内切圆切点到避障内切圆到第二避障外切圆切点之间第二段圆弧;
22、从第二避障外切圆上获取第二避障外切圆与避障内切圆切点到第二避障外切圆与初始航迹线切点之间第三段圆弧;
23、用所述第一段圆弧、第二段圆弧和第三段圆弧形成曲线替换初始航迹线上第一避障外切圆与初始航迹线切点到第二避障外切圆与初始航迹线切点之间航迹线。
24、在一些可选的实施例中,所述根据避障航迹线和面元网格中的网格线,确定炮点和检点调整位置,根据调整位置调整障碍物区域的炮点和检点,包括:
25、在面元网格上删除位于障碍物区域内的炮点和检点;
26、根据避障航迹线和船的气源枪源数,生成避障炮线;
27、根据避障炮线和面元网格上网格线的交点,重新确定炮点位置和检点位置,在面元网格上添加重新确定的炮点和检点。
28、在一些可选的实施例中,所述一种海域自动避障方法还包括:
29、根据所述初始航迹线和障碍物的形状参数,对障碍物集合中需要合并的障碍物进行合并。
30、在一些可选的实施例中,所述对障碍物集合中需要合并的障碍物进行合并,包括:
31、根据障碍物的位置,对位置部分或全部重叠的障碍物进行合并;
32、根据初始航迹线和初次合并后的障碍物的交点,得到每个障碍物的避障线束路径集;避障线束路径集中包括避让每个障碍物的避障路径;
33、若船避让第一障碍物的避障路径穿过第二障碍物,则将第一障碍物与第二障碍物合并,得到第三障碍物,若船避让第四障碍物与第五障碍物的避障路径有冲突,则合并第四障碍物与第五障碍物,得到第六障碍物;
34、在障碍物集合中删除第一障碍物、第二障碍物、第四障碍物与第五障碍物,添加第三障碍物和第六障碍物。
35、在一些可选的实施例中,所述一种海域自动避障方法,还包括:根据炮点距离和检点距离建立面元网格。
36、在一些可选的实施例中,所述根据炮点距离和检点距离建立面元网格,包括:
37、根据炮点距离确定纵向网格线之间的纵向距离,根据检点距离确定横向网格线之间的横向距离;
38、根据所述纵向距离和横向距离,建立包括纵向网格线和横向网格线的面元网格。
39、第二方面,本发明实施例提供了一种海域自动避障的装置,包括:
40、第一生成模块,用于在预先建立的面元网格上生成初始航迹线;
41、第二生成模块,用于根据障碍物的形状参数和安全距离、船的转弯半径,对初始航迹线中障碍物区域的部分进行调整,生成避障航迹线;
42、调整模块,用于根据避障航迹线和面元网格中的网格线,确定炮点和检点调整位置,根据调整位置调整障碍物区域的炮点和检点;
43、第三生成模块,用于生成包括避障航迹线、调整后的炮点和检点的避障航迹图。
44、第三方面,本发明实施例提供一种计算机存储介质,所述计算机存储介质中存储有计算机可执行指令,所述计算机可执行指令被处理器执行时实现上述任一所述的海域自动避障方法。
45、第四方面,本发明实施例还提供一种计算机设备,其特征在于,包括:存储器、处理器及存储于存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现权上述任一所述的海域自动避障方法。
46、第五方面,本发明实施例还提供一种上述任一所述的海域自动避障方法在复杂海域自动避障系统中的应用。
47、本发明实施例提供的上述技术方案的有益效果至少包括:
48、本发明实施例提供的海域自动避障方法,在对初始航迹线进行调整生成避障航迹线时,考虑了障碍物的形状参数和安全距离、船的转弯半径等各种因素,得到的避障航迹线既能有效地绕开障碍物区域,又能避免引转弯半径不够而形成的安全隐患;根据避障航迹线和面元网格中的网格线,调整炮点和检点位置,可以实现将炮点和检点调整到障碍物区域附近的避障炮线和网格线的交点上,既能有效避障又能保证勘探覆盖范围,基于避障航迹线、调整后的炮点和检点生成避障航迹图,该方法实现了海洋勘探中障碍物的自动避障,减少了人工拓绘和手工避障时间,相对手工避障方式更省时省力;且解决了由于传统避障方法引起的勘探覆盖范围缺失问题,提高了勘探的精度。
49、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
50、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
- 还没有人留言评论。精彩留言会获得点赞!