自移动设备及其安防方法与流程
本公开涉及自移动的安防,具体的涉及一种自移动设备及其安防方法。
背景技术:
1、随着现代科技水平的不断进步,人们的生活水平不断提高,自动化、智能化的自移动设备越来越被广泛地应用到日常生活中。例如清洁机器人、割草机器人等智能设备不断问世,给人们的生活带来了极大的便利。但现有的自移动设备,例如清洁机器人、割草机器人并不具有安防功能。
2、现有的安防设备,一般通过相机拍摄待监控区域内的图像或者视频信息,并将该图像或者视频信息传输至终端,供用户在终端判断是否有人入侵待监控区域,也就是说需要人工辅助方能确定待监控区域是否存在安全隐患,无法独立的自助判断待监控区域内的安全情况,存在智能化水平低的问题。
技术实现思路
1、为了解决现有技术中存在的问题,本公开提供了一种自移动设备及其安防方法。
2、第一方面,本公开的自移动设备包括:
3、车体;
4、行走机构,设置于所述车体上,被配置为驱动所述车体在待监控区域内行走;
5、图像采集元件,设置在所述车体上,用于采集环境图像;
6、控制器,与所述行走机构和所述图像采集元件均电连接,所述自移动设备至少具有自动工作模式,在所述自动工作模式下,所述控制器被配置为获取所述待监控区域在世界坐标系下的边界坐标和可疑对象在所述环境图像中的图像投影,并根据所述图像投影获取所述可疑对象在世界坐标系下的三维空间坐标,并根据所述待监控区域的边界坐标和所述可疑对象的三维空间坐标判断所述可疑对象是否入侵所述待监控区域。
7、在一个实施例中,所述图像采集元件为环视摄像头。
8、在一个实施例中,所述控制器还被配置为在判断所述可疑对象入侵所述待监控区域时,将包含的所述可疑对象的图像投影的环境图像上传至用户终端。
9、在一个实施例中,所述控制器还被配置为确定待监控区域。
10、在一个实施例中,所述控制器确定待监控区域的方法为控制所述行走机构驱动所述车体沿着指定的区域边界走一圈,实时计算所述车体的位姿并记录标记为所述待监控区域的边界。
11、在一个实施例中,所述控制器还被配置为在所述待监控区域内确定所述自移动设备的巡逻路径,以使所述自移动设备能在所述自动工作模式下沿所述巡逻路径行走,并使所述自移动设备沿所述巡逻路径行走时能连续监控所述待监控区域内是否存在可疑对象。
12、在一个实施例中,所述控制器还被配置为使所述自移动设备在所述自动工作模式下周期性地沿所述巡逻路径行走。
13、在一个实施例中,所述控制器还被配置为在所述待监控区域内确定至少一个所述自移动设备的固定监控点以及各个所述固定监控点的监控时长,以使所述自移动设备能在所述自动工作模式下在各个固定监控点之间行走并在各个所述固定监控点处停留所述监控时长,进而监控所述待监控区域内是否存在可疑对象。
14、在一个实施例中,所述自移动设备为割草机器人。
15、在一个实施例中,所述自移动设备还具有手动工作模式,在所述手动工作模式下,所述控制器被配置为根据用于指令控制所述行走机构在所述待监控区域内行走,以通过所述图像采集元件采集的环境图像判断所述待监控区域内是否存在可疑对象。
16、在一个实施例中,当所述可疑对象的三维空间坐标在世界坐标系中位于所述待监控区域的边界坐标靠近所述待监控区域的一侧时,所述控制器判断所述可疑对象入侵所述待监控区域;或,
17、当所述可疑对象的三维空间坐标在世界坐标系中位于所述待监控区域的边界坐标远离所述待监控区域的一侧时,所述控制器判段所述可疑对象未入侵所述待监控区域。
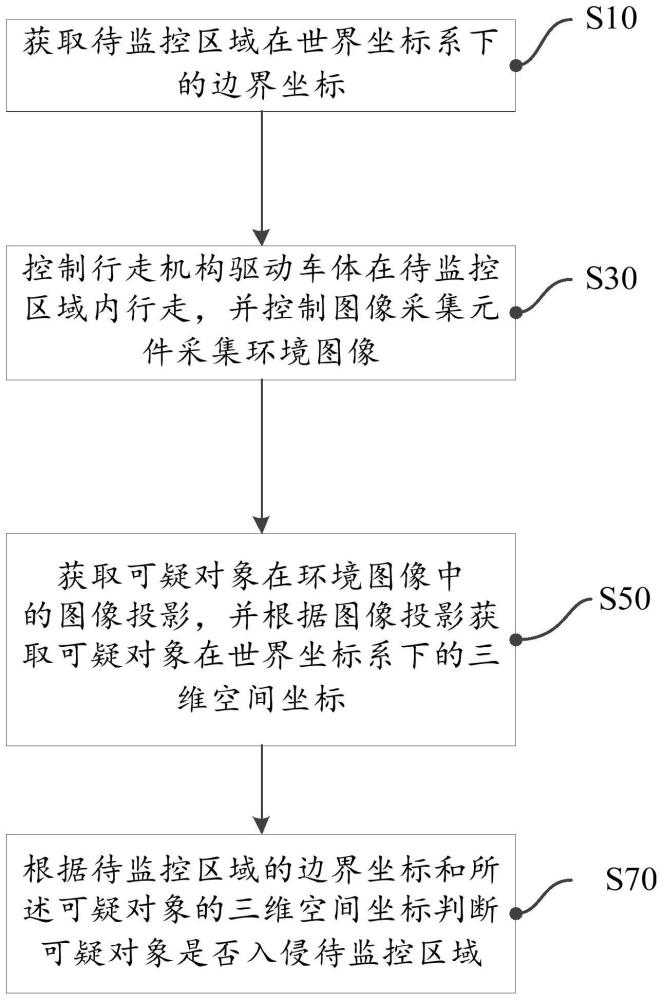
18、第二方面,本公开的自移动设备的安防方法,其中,所述自移动设备具体为如上任一实施例中所述的自移动设备,所述安防方法包括如下步骤:
19、s10:获取所述待监控区域在世界坐标系下的边界坐标;
20、s30:控制所述行走机构驱动所述车体在所述待监控区域内行走,并控制所述图像采集元件采集环境图像;
21、s50:获取可疑对象在所述环境图像中的图像投影,并根据所述图像投影获取所述可疑对象在世界坐标系下的三维空间坐标;
22、s70:根据所述待监控区域的边界坐标和所述可疑对象的三维空间坐标判断所述可疑对象是否入侵所述待监控区域。
23、在一个实施例中,步骤s10还包括控制所述行走机构驱动所述车体沿着指定的区域边界走一圈,实时计算所述车体的位姿并记录标记为所述待监控区域的边界。
24、在一个实施例中,所述步骤s30包括:
25、控制所述行走机构驱动所述车体沿巡逻路径行走,并控制所述图像采集元件连续采集环境图像。
26、在一个实施例中,在所述步骤s30中,控制所述行走机构驱动所述车体周期性地沿所述巡逻路径行走。
27、在一个实施例中,所述步骤s30包括:
28、控制所述行走机构驱动所述车体向至少一个固定监控点行走并在各个所述固定监控点处停留预设监控时长,并控制所述图像采集元件在所述固定监控点采集环境图像。
29、在一个实施例中,所述步骤s50包括如下步骤:
30、s501:获取所述可疑对象在所述环境图像中的图像投影;
31、s503:根据可疑对象的图像投影获取穿过所述图像采集元件的光心与可疑对象的图像投影上的采样点的直线在世界坐标系下的数学表达式;
32、s505:根据所述数学表达式和所述采样点在世界坐标系下的z向坐标,获取所述采样点在世界坐标系下的x向坐标和y向坐标。
33、在一个实施例中,在步骤s503包括如下步骤:
34、s5031:根据图像采集元件相对自移动设备的外参,获取相机坐标系下图像采集元件的光心在机器坐标系下的第一坐标;
35、s5033:根据自移动设备的当前位姿和所述第一坐标获取图像采集元件的光心在世界坐标系下的第二坐标;
36、s5035:以世界坐标系下所述图像采集元件的光心为直线上一点,所述采样点至所述图像采集元件的光心的第一方向向量为直线方向,根据直线点向式方程构建穿过所述图像采集元件的光心与可疑对象的图像投影上的采样点的直线在世界坐标系下的数学表达式。
37、在一个实施例中,在步骤s3035中,获取采样点至所述图像采集元件的光心的第一方向向量包括如下步骤:
38、s50351:获取所述图像投影中所述采样点的像素坐标;
39、s50352:根据所述图像采集元件的内参,计算所述采样点在相机坐标系下的第三坐标;
40、s50353:在相机坐标系下,根据所述第三坐标和所述图像采集元件的光心坐标获取所述采样点至所述图像采集元件的光心的第二方向向量;
41、s50354:根据图像采集元件相对自移动设备的外参,将相机坐标系下的所述第二方向向量转化成机器坐标系下的第三方向向量;
42、s50355:根据自移动设备的当前位姿,将机器坐标系下的所述第三方向向量转化成世界坐标系下的所述第一方向向量。
43、在一个实施例中,所述步骤s70包括如下步骤:
44、当所述可疑对象的三维空间坐标在世界坐标系中位于所述待监控区域的边界坐标靠近所述待监控区域的一侧时,所述控制器判断所述可疑对象入侵所述待监控区域;或,
45、当所述可疑对象的三维空间坐标在世界坐标系中位于所述待监控区域的边界坐标远离所述待监控区域的一侧时,所述控制器判段所述可疑对象未入侵所述待监控区域。
46、本公开的自移动设备及其安防方法的有益效果之一是,本公开的自移动设备上安装图像采集元件使其能够实现割草、清扫等固有功能,此外还兼具了安防功能,拓展了其功能范围。更重要的是,自移动设备在待监控区域内行走时其上图像采集元件实时采集环境图像,在自动工作模式下,控制器根据在世界坐标系下监控区域的边界坐标和环境图像内可疑对象的三维空间坐标的关系,自动判断可疑对象是否入侵待监控区域,无需如现有技术中人工辅助判断,具有较高的智能化水平,极大地改善了用户上的使用体验。
- 还没有人留言评论。精彩留言会获得点赞!