一种遥控汽车行驶系统及其方法、车辆与流程
本发明涉及汽车远程控制,具体涉及一种遥控汽车行驶系统、方法及车辆。
背景技术:
1、遥控泊车是指在自动泊车的基础上,驾驶员无需在车上,通过钥匙或手机等智能终端远程遥控汽车自动泊入。
2、目前遥控泊车系统,存在以下特点:
3、(1)其在使用时必须提前指定一个停靠位置,操作手机将汽车从一个位置遥控到指定的位置中,泊车过程不能改变指定车位,如要遥控到其他位置,必须重新指定,重复操作,并且停车位置的指定一般是系统提前设定的,不能任意指定;
4、(2)其没有将汽车周边的环境信息、汽车前方远距离图像信息上传至手机或平板等智能终端供用户监控使用;
5、(3)不能连续不间断遥控汽车向前、向后、转弯行驶,也不能手动遥控泊车;
6、(4)其遥控面板类似于遥控手柄,一般可以输出用户操作坐标的系统,用户可以通过手动点击、滑动或长按等方式确定坐标,输入到与之配合使用的数据处理系统,以控制被控制件执行向前、后、左、右,或上、下运动。其中,单个手柄一般只能控制两个自由度的运动,一般为前后+左右,或者上下+左右,用于汽车遥控时无法同时控制汽车档位、前进、后退、控制车速、方向盘转角等,因此如果需要手动遥控汽车行驶,必须多个手柄同时使用,操作复杂,控制难度大。
技术实现思路
1、本发明的目的在于提出一种遥控汽车行驶系统及其遥控方法、车辆,能够实现手动遥控行车或泊车,且操作便捷,控制难度低。
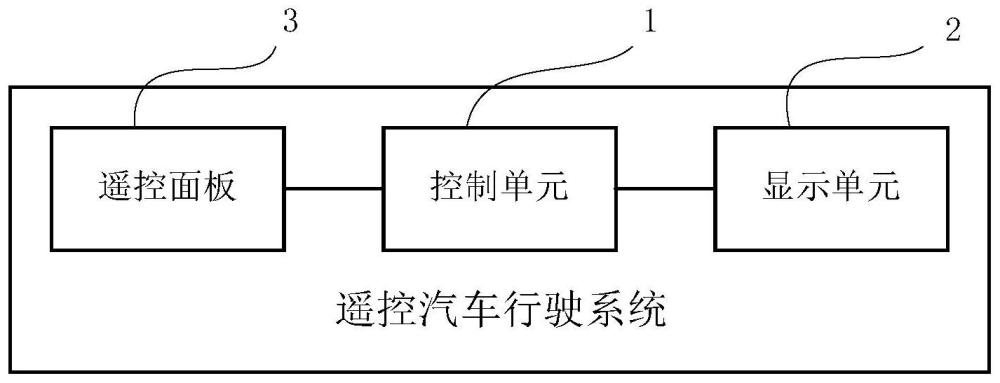
2、为实现上述目的,本发明的实施例提出一种遥控汽车行驶系统,包括控制单元、显示单元和遥控面板;
3、所述控制单元用于获取目标汽车的实时全景影像,并输出给所述显示单元;
4、所述显示单元至少包括第一显示区域,所述第一显示区域用于显示所述实时全景影像;
5、所述遥控面板用于接收用户输入的操作信息,将所述操作信息通过所述控制单元发送给所述目标汽车,以控制所述目标汽车行驶;
6、其中,所述显示单元为触控显示,所述遥控面板具有预设透明度,位于所述第一显示区域中,与所述实时全景影像叠加显示。
7、优选地,所述显示单元还包括第二显示区域;
8、所述控制器用于获取目标汽车的实时前方影像,并输出给所述显示单元;
9、所述第二显示区域用于显示所述实时前方影像。
10、优选地,所述遥控面板至少包括第一区域、第二区域、第三区域和第四区域;
11、当所述操作信息为用户按压所述第一区域时,所述操作信息用于控制所述目标汽车挂前进档、方向盘向左转、以第一速度行驶;
12、当所述操作信息为用户按压所述第二区域时,所述操作信息用于控制所述目标汽车挂前进档、方向盘向右转、以第一速度行驶;
13、当所述操作信息为用户按压所述第三区域时,所述操作信息用于控制所述目标汽车挂倒车档、方向盘向左转、以第二速度行驶;
14、当所述操作信息为用户按压所述第四区域时,所述操作信息用于控制所述目标汽车挂倒车档、方向盘向左转、以第二速度行驶。
15、优选地,所述操作信息包括用户按压的坐标点,所述第一速度根据所述用户按压的坐标点的坐标以及预设的第一车速限值计算确定;所述第二速度根据所述用户按压的坐标点的坐标以及预设的第二车速限值计算确定。
16、优选地,所述遥控面板还包括第五区域、第六区域、第七区域和第八区域;
17、当所述操作信息为用户按压所述第五区域时,所述操作信息用于控制所述目标汽车挂前进档、方向盘向左转,且速度为0;
18、当所述操作信息为用户按压所述第六区域时,所述操作信息用于控制所述目标汽车挂前进档、方向盘向右转,且速度为0;
19、当所述操作信息为用户按压所述第七区域时,所述操作信息用于控制所述目标汽车挂倒车档、方向盘向左转,且速度为0;
20、当所述操作信息为用户按压所述第八区域时,所述操作信息用于控制所述目标汽车挂倒车档、方向盘向左转,且速度为0。
21、优选地,所述方向盘的转动角度根据所述用户按压的坐标点的x轴坐标值计算确定。
22、优选地,所述遥控面板为基于一圆形区域构建,所述圆形区域的圆心o(xo,yo)为所述遥控坐标系的原点(0,0),所述圆形区域的边界上设置有点b(xb,yb)、点c(xc,yc)、点d(xd,yd)、点e(xe,ye)、点g(xg,yg)、点h(xh,yh)、点i(xi,yi)和点j(xj,yj),所述遥控坐标系的y轴上设置有点a(xa,ya)和点f(xf,yf),所述点b和点g位于所述y轴上,所述点i和点d位于所述遥控坐标系的x轴上;
23、其中:
24、yb>ya≥0,yb>yc≥0,xc>0,yg<yf≤0,yg<ye≤0,xe>0;
25、线段ab、线段aj与所述圆形区域的边界bj合围形成所述第一区域;
26、线段ab、线段ac与所述圆形区域的边界bc合围形成所述第二区域;
27、线段fg、线段fh与所述圆形区域的边界gh合围形成所述第三区域;
28、线段fg、线段fe与所述圆形区域的边界eg合围形成所述第四区域。
29、优选地,其中:
30、线段aj、线段ao、线段oi与所述圆形区域的边界ji合围形成所述第五区域;
31、线段ac、线段ao、线段od与所述圆形区域的边界cd合围形成所述第六区域;
32、线段fh、线段fo、线段oi与所述圆形区域的边界ih合围形成所述第七区域;
33、线段fe、线段fo、线段od与所述圆形区域的边界de合围形成所述第八区域。
34、本发明的另一实施例还提出一种遥控汽车行驶的方法,基于上述的遥控汽车行驶系统实现,所述方法包括如下步骤:
35、所述控制单元获取目标汽车的实时全景影像,并输出给所述显示单元;
36、所述显示单元响应于接收到所述实时全景影像,控制其第一显示区域对所述实时全景影像进行显示;
37、所述遥控面板接收用户输入的操作信息,将所述操作信息通过所述控制单元发送给所述目标汽车,以控制所述目标汽车行驶。
38、本发明的另一实施例还提出一种车辆,包括上述的遥控汽车行驶系统。
39、实施本发明的实施例,至少具有以下有益效果:
40、在遥控汽车行驶过程时,所述遥控汽车行驶系统能够获取目标汽车的实时全景影像,并输出给系统的显示单元进行显示,实时全景影像包含了当前目标汽车以及目标汽车所在的360度环境情况,用户通过观看显示单元显示的实时全景影像,可以获知目标汽车、停车位及其周围障碍物的具体情况,进一步地即可通过操作遥控面板输入操作信息控制所述目标汽车行驶,能够很好地适用于汽车泊车,使得泊车过程能任意指定车位,实现手动遥控行车或泊车,且操作便捷,控制难度低。
41、本发明的实施例的其它特征和优点将在随后的说明书中阐述。
- 还没有人留言评论。精彩留言会获得点赞!