一种非预设参数的欠迹向驱动多航天器编队重构控制方法与流程
1.本发明涉及欠驱动航天器控制技术领域,具体涉及一种非预设参数的欠迹向驱动多航天器编队重构控制方法。
背景技术:
2.多颗航天器被发射到太空中,首先需要进行构型初始化,接着进行队形的保持,然后根据任务的调整再进行队形重新构造,这些步骤涉及航天器在运行过程中的变轨技术,整体形态发生变化(数量、形状等)。无论是编队飞行、星座构建、集群任务、在轨服务、甚至航天器群博弈,都要求每颗航天器从当前位置转移到指定目标位置,因此重构是多航天器任务执行层面。航天器在运行过程中,由于太空垃圾、宇宙粒子、机械故障等原因可能导致个别推机器失效,此时全驱动控制算法无法应对欠驱动情况,因此研究欠驱动航天器控制算法具有实际意义。
3.欠驱动情形可分为两种:欠径向驱动和欠迹向驱动,线性化的动力学方程在没有沿轨迹输入的情况下存在一个不可控的特征值,根据当前欠迹向驱动的研究结论指出欠迹向情形不可控状态变量等于圆轨道编队自然构型的保持条件且恒为零,所以不影响系统的能空性。欠迹向驱动系统仅包含5维变量,控制输入只有径向和法向2个自由度,因此设计稳定可控的欠迹向驱动控制方法是一大难点。
4.进一步的说,当前的面向输入饱和的迹向欠驱动航天器编队重构的控制方法忽视了一个问题,即为了简化控制器的推导,预先设定了欠驱动线性变换矩阵中的某些参数的值。这种操作不仅缺乏理论依据,还可能会限制系统状态之间的耦合关系,预先决定系统的稳定重构精度,从而影响所提出的控制器的普适性。本发明提供的是一种非预设参数的控制器,系统状态之间的耦合关系不像在以前的方法中那样受预设参数的限制,系统收敛性的推导过程及相关表达式更为简洁,同时可以预估制控制器在三个通道位置和速度的控制精度,对实际工程更具借鉴意义。
技术实现要素:
5.针对现有技术的不足,本发明旨在提供一种非预设参数的欠迹向驱动多航天器编队重构控制方法,通过本发明的方法可以在仅包含径向和法向两个自由度推力时完成卫星编队重构任务。
6.为了实现上述目的,本发明采用如下技术方案:
7.一种非预设参数的欠迹向驱动多航天器编队重构控制方法,所方法包括:
8.s1将欠迹向驱动动力学方程分为3维和2维两个状态变量,设计了一个2
×
3阶的非预设参数线性变换矩阵将3维变量降为2维,于是欠驱动系统由两个2维变量组成;
9.s2利用经线性化变换后的2维变量设计滑模面,使用滑模控制法推导出仅包含径向和法向的欠驱动重构控制器;
10.s3分析当闭环系统收敛至期望构型时线性变换矩阵和滑模控制法需满足的参数
条件,并推导相对位置和相对速度在径向、迹向和法向的收敛误差表达式,接着设置控制参数,由此预估制控制器在三个通道位置和速度的控制精度。
11.需要说明的是,所述步骤s1包括:
12.s1.1假设领航者航天器运行在圆形轨道上,其纬度幅角为n0,定义第i颗跟随者卫星相对领航者卫星的状态误差为:
[0013][0014]
其中,e
iρ
=[e
x e
y ez]
t
为x,y,z三个方向的位置误差,为相应的速度误差;将欠迹向驱动动力学方程分解为一个3维和一个2维变量构成的状态表达式:
[0015][0016]
其中,
[0017][0018][0019]
ui=[u
x uz]
t
,d
i2u
=[0 d
iy 0]
t
,d
i2a
=[d
ix d
iz
]
t
;
[0020]
s1.2由于而e
i2a
∈r2,为了使状态变量的自由度与控制输入的自由度相匹配,所以设计一个2
×
3阶非预设参数线性变换矩阵:
[0021][0022]
其中,a3,b3,f3均为常数;
[0023]
使用p
21
对进行线性变换得到一个2阶状态变量:
[0024][0025]
需要说明的是,利用经线性化变换后的变量设计滑模面,其中:
[0026]
s2.1根据滑模面设计规则选择如下滑模面:
[0027][0028]
其中,c2>0为常数。
[0029]
s2.2等效控制律u
i1
可通过对滑模面求导得到参数形式的等效控制律:
[0030][0031]
其中,
[0032]
θ1,
θ2分别表示θ的第一项和第二项;
[0033]
选择开关控制为u
i2
=-k1s
i-k2sig
γ
(si),其中k1>0,k2>0和0<γ<1为滑模参数,于是欠迹向推力控制器ui可以表达为:
[0034]
ui=u
i1
+u
i2
;
[0035]
需要说明的是,所述步骤s3包括:
[0036]
s3.1当k
2-δ
im
||si||-γ
>0或k
1-δ
im
||si||-1
>0成立时,闭环系统将在有限时间收敛到期望轨迹,滑模面的收敛误差精度可以被描述为:
[0037][0038]
而线性化后的状态变量和的收敛误差表达式为:
[0039][0040][0041]
s3.2当线性变换矩阵p
21
中的非预设参数满足
[0042]a21
=b3/a3>0;
[0043]
可以的得到相对位置跟踪误差在x,y,z三个通道的收敛误差为:
[0044][0045][0046]
相对位置和相对运动速度跟踪误差在迹向的收敛误差为:
[0047][0048][0049]
相对位置和相对运动速度跟踪误差在法向的收敛误差为:
[0050][0051][0052]
设置滑模控制参数及满足线性变换矩阵p
21
中的参数值,根据三个通道的相对位置和相对速度收敛误差的表达式,预估控制器(11)式在x,y,z三个通道的相对位置和相对速度的控制精度。
[0053]
与现有技术相比,本发明提供的是一种非预设参数的控制器,系统状态之间的耦合关系不像以前的方法中那样受预设参数的限制,系统收敛性的推导过程及相关表达式更
为简洁,同时可以预估制控制器在三个通道位置和速度的控制精度,对实际工程更具借鉴意义。
附图说明
[0054]
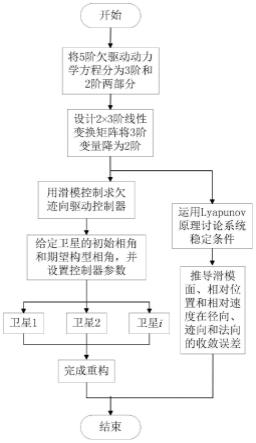
图1为本发明的基于线性变换的欠迹向驱动多航天器编队重构控制方法的流程图;
[0055]
图2为本发明仿真试验中跟随者航天器的控制输入示意图,其中,图2a为跟随者航天器1的控制输入、图2b为跟随者航天器2的控制输入,图2c跟随者航天器3的控制输入;
[0056]
图3为本发明仿真试验中跟随者航天器的相对于领航者航天器的速度示意图,其中,图3a为跟随者航天器1的相对于领航者航天器的速度、图3b为跟随者航天器1的相对于领航者航天器的速度、图3c为跟随者航天器1的相对于领航者航天器的速度;
[0057]
图4为本发明仿真试验中3颗跟随者航天器在xy平面、xz平面、yz平面和三维空间的轨迹示意图,其中,图4a为3颗跟随者航天器在xy平面的轨迹、图4b为3颗跟随者航天器在xz平面的轨迹、图4c为3颗跟随者航天器在yz平面的轨迹、图4d为3颗跟随者航天器在三维空间轨迹。
具体实施方式
[0058]
以下将对本发明作进一步的描述,需要说明的是,以下实施例以本技术方案为前提,给出了详细的实施方式和具体的操作过程,但本发明的保护范围并不限于本实施例。
[0059]
如图1所示,本发明为一种非预设参数的欠迹向驱动多航天器编队重构控制方法,所方法包括:
[0060]
s1将欠迹向驱动动力学方程分为3维和2维两个状态变量,设计了一个2
×
3阶的线性变换矩阵将3维变量降为2维,于是欠驱动系统由两个2维变量组成;
[0061]
s2利用经线性化变换后的2维变量设计滑模面,使用滑模控制法推导出仅包含径向和法向的欠驱动重构控制器;
[0062]
s3分析当闭环系统收敛至期望构型时线性变换矩阵和滑模控制法需满足的参数条件,并推导相对位置和相对速度在径向、迹向和法向的收敛误差表达式,接着设置控制参数,由此预估制控制器在三个通道位置和速度的控制精度。
[0063]
进一步的,本发明的所述步骤s1包括:
[0064]
s1.1假设领航者航天器运行在圆形轨道上,其纬度幅角为n0,定义第i颗跟随者卫星相对领航者卫星的状态误差为:
[0065][0066]
其中,为为x,y,z三个方向的位置误差,为相应的速度误差;将欠迹向驱动动力学方程分解为一个3维和一个2维变量构成的状态表达式:
[0067][0068]
其中,
[0069][0070][0071]
ui=[u
x uz]
t
,d
i2u
=[0 d
iy 0]
t
,d
i2a
=[d
ix d
iz
]
t
;
[0072]
s1.2由于而e
i2a
∈r2,所以设计一个2
×
3阶非预设参数线性变换矩阵:
[0073][0074]
其中,a3,b3,f3均为常数;
[0075]
使用p
21
对进行线性变换得到一个2阶状态变量:
[0076][0077]
进一步的,本发明利用经线性化变换后的变量设计滑模面,其中:
[0078]
s2.1根据滑模面设计规则选择如下滑模面:
[0079][0080]
其中,c2>0为常数。
[0081]
s2.2等效控制律u
i1
可通过对滑模面求导得到参数形式的等效控制律:
[0082][0083]
其中,
[0084]
θ1,θ2分别表示θ的第一项和第二项;
[0085]
选择开关控制为u
i2
=-k1s
i-k2sig
γ
(si),其中k1>0,k2>0和0<γ<1为滑模参数,于是欠迹向推力控制器ui可以表达为:
[0086]
ui=u
i1
+u
i2
;
[0087]
进一步的,本发明的所述步骤s3包括:
[0088]
s3.1当k
2-δ
im
||si||-γ
>0或k
1-δ
im
||si||-1
>0成立时,闭环系统将在有限时间收敛到期望轨迹,滑模面的收敛误差精度可以被描述为:
[0089][0090]
而线性化后的状态变量和的收敛误差表达式为:
[0091]
[0092][0093]
s3.2当线性变换矩阵p
21
中的参数满足
[0094]a21
=b3/a3>0;
[0095]
可以的得到相对位置跟踪误差在x,y,z三个通道的收敛误差为:
[0096][0097][0098]
相对位置和相对运动速度跟踪误差在迹向的收敛误差为:
[0099]
|ey|≤δ
ey
=ζ
in/a21
;
[0100][0101]
相对位置和相对运动速度跟踪误差在法向的收敛误差为:
[0102][0103][0104]
设置滑模控制参数及满足线性变换矩阵p
21
中的参数值,根据三个通道的相对位置和相对速度收敛误差的表达式,预估控制器(11)式在x,y,z三个通道的相对位置和相对速度的控制精度。
[0105]
实施例1
[0106]
步骤1.1:假设领航者航天器运行在圆形轨道上,其纬度幅角为n0,定义第i颗跟随者卫星相对领航者卫星的状态误差为:其中e
iρ
=[e
x e
y ez]
t
为位置误差,为速度误差。已知欠迹向驱动动力学方程为其中,
[0107][0108]
将其改写为由一个3维变量和一个2维变量的形式:
[0109][0110]
其中,
[0111][0112][0113]
ui=[u
x uz]
t
,d
i2u
=[0 d
iy 0]
t
,d
i2a
=[d
ix d
iz
]
t
ꢀꢀꢀ
(4)
[0114]
步骤1.2:由于为三阶变量而e
i2a
为二阶变量,于是设计一个2
×
3阶非预设参数线性变换矩阵:
[0115][0116]
其中,a3,b3,f3为常数。
[0117]
对进行线性变换得到一个2阶状态变量:
[0118][0119]
步骤2.1:通过线性变量设计滑模面:
[0120][0121]
其中,c2>0为常数,并且可知:
[0122][0123]
步骤2.2:对滑模面求导:
[0124][0125]
则可以得到参数形式的效控制律u
i1
:
[0126][0127]
其中,
[0128]
θ1,θ2分别表示θ的第一项和第二项。
[0129]
开关控制选择为u
i2
=-k1s
i-k2sig
γ
(si),其中k1>0,k2>0和0<γ<1为滑模参数,于是欠迹向推力控制器ui可以表达为:
[0130]
ui=u
i1
+u
i2
,(11)
[0131]
步骤3.1:选取lyapunovp函数v对时间求导后得到:
[0132][0133]
其中,δi=(c2p
21
+p
21a21
)d
i2u
+d
i2a
,||δi||≤δ
i2m
=(c2||p
12
||+||p
12a21
||+1)d
im
,而(12)式可以转化为:
[0134][0135]
上式可以进一步改写为如下两种形式:
[0136][0137][0138]
所以当k
2-δ
im
||si||-γ
>0或k
1-δ
im
||si||-1
>0成立时,闭环系统将在有限时间收敛到期望轨迹,滑模面的收敛误差重构精度可以被描述为:
[0139][0140]
对于式(7),当滑模面收敛至时,系统的动力学方程可以构建为:
[0141][0142]
其中,ζ
ip
=-p
21dj2u
,且有ζ
ip
≤-||p
21
||d
im
。进一步,将上式改写为如下两种形式:
[0143][0144][0145]
当和成立时,线性状态变量和的重构精度的表达式为:
[0146][0147][0148]
步骤3.2:接下来根据线性变换矩阵p
21
求取闭环系统在x,y,z三个通道的收敛误差。根据式(6)可以得到所以法向的相对位置收敛误差可以表示为:
[0149][0150]
对(6)式第二项求导,可得法向的相对速度收敛误差:
[0151][0152]
根据(6)式第一项可得一个一阶系统:
[0153][0154]
其中,根据一阶系统稳定的充要条
件,可知当
[0155]a21
=b3/a3>0,(25)
[0156]
此时式(24)可以写为如下两种表达式:
[0157][0158]
当或成立时,迹向的相对位置误差和相对速度收敛误差为:
[0159][0160][0161]
对欠迹向驱动系统在迹向的动力学表达式积分:
[0162][0163]
令上式可表示为:
[0164][0165]
对于自然构型编队,整个重构过程一直满足关系因此故(30)式化简为:
[0166][0167]
于是在径向的相对位置收敛误差为:
[0168][0169]
径向的相对速度收敛误差为:
[0170][0171]
步骤3.3:线性变换矩阵p
21
和滑模控制法的控制器参数设置为:a3=-454.5,b3=-0.4,f3=1,c3=0.003γ=0.5,k1=0.003,k2=0.000001,c2=0.003。假设扰动的边界值为δ
i2m
=1
×
10-6
m/s2,根据式(16)、(20)-(23)、(27)-(28)和(32)-(33)可以预估滑模面、线性化后的相对位置误差、线性化后相对速度误差及径向、迹向和法向的相对位置和相对速度的收敛误差上届依次为:的收敛误差上届依次为:的收敛误差上届依次为:即在实际的仿真中,重构后期的稳定重构精度小于上述数值。
[0172]
仿真试验
[0173]
本发明的实验结果如下:
[0174]
选择一般圆轨道为当前队形轨道,投影圆轨道为期望构型轨道:
[0175][0176]
航天器期望的相对运动位置矢量为当前相对位置矢量一般圆轨道和投影圆轨道的半径分别设置为r
ig
=500m,r
ip
=1000m,3颗跟随者航天器的初始队形相角分别为而期望构型的相角为领航者航天器的轨道要素选择为:半长轴6878.137km、偏心率为0、轨道倾角42deg、升交点赤经-60deg、纬度幅角30deg。
[0177]
图2(a)-(c)为3颗跟随者航天器在径向和法向的控制输入,数值大小为10-3
量级。图3(a)-(c)表示3颗跟随者航天器相对于领航者的速度变化情况,相对速度的大小影响着控制器参数的设置,在本实施案例中,在10-3
量级控制输入对应于100量级相对运动速度。图4(a)-(c)中三颗跟随者航天器在xy、xz、yz平面上的轨迹;图4(d)为3d重构轨迹,每颗跟随者在图2所示径向和法向两个方向的作用下转移至目标点,最终在投影圆轨道上形成了期望的编队构型,如果控制过大则重构轨迹将变成直线。
[0178]
对于本领域的技术人员来说,可以根据以上的技术方案和构思,给出各种相应的改变和变形,而所有的这些改变和变形,都应该包括在本发明权利要求的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1