一种无人机操纵器的3D摇杆的制作方法
一种无人机操纵器的3d摇杆
技术领域
1.本发明涉及控制装置技术领域,具体是涉及一种无人机操纵器的3d摇杆。
背景技术:
2.近几年,随着航拍机在设计上更轻便、更易于操作以及价格的日渐下降,从新闻摄影到商业外拍都有无人机的小小身影出现,消费级无人机也渐渐成为了众多摄影爱好者的新“玩具”。在航模领域中,摇杆控制装置应用相当普遍,尤其是3d摇杆装置,操作者通过对摇杆进行倾倒操作来输出相应信号。目前使用的3d摇杆装置一般包括摇杆、摇臂、可变电阻组件和复位机构。在长时间的使用过程中或者不规范存放时,摇杆长时间朝向一个方向推动会造成复位机构中的弹簧处于持续拉伸状态,久而久之就会造成复位弹簧的自身弹力减弱,导致复位不充分、迅速的情况。
3.中国专利申请cn114326919a公开了一种用于无人机操纵器的3d摇杆,通过滑动定向锁止组件和定位销的配合,实现了如何对摇杆进行定向锁止以及复位锁止的限位固定工作,使其在进行定向锁止时无需操作者长时间对摇杆的推动,在复位锁止时摇杆不会因为受到外力而随意转动或长时间朝向一方倾斜,导致一方键位使用寿命降低,但是该方案在使用过程中通过取出定位销使得整个摇杆可以进行四个方向的移动,若是使用完毕忘记插入定位销或者定位销丢失,则此时将无法完成对摇杆的固定工作。
技术实现要素:
4.针对上述问题,提供一种无人机操纵器的3d摇杆,通过限位板和第一定位组件配合完成摇杆、第一复位组件和第二复位组件之间的位置固定,第二定位组件完成第二复位组件和安装座之间的位置固定。
5.为解决现有技术问题,本发明采用的技术方案为:
6.提供一种无人机操纵器的3d摇杆,包括手柄、安装座、第一复位组件、第二复位组件和摇杆,还包括第一定位组件和第二定位组件,安装座整体呈圆柱状,第一复位组件能够活动的设置在第二复位组件上方,第一复位组件远离第二复位组件的主面上滑动设置有限位板,限位板上开设有与摇杆杆部相吻合的固定槽,限位板的滑动方向与安装座的直径方向平行,第一定位组件滑动设置在第一复位组件上,第一定位组件的滑动方向与安装座的轴线平行,第一定位组件处于限位板的移动路径上,第一定位组件用于与第二复位组件进行位置固定,第二定位组件滑动设置在第二复位组件上,第二定位组件的滑动方向与安装座的轴线平行,第二定位组件与第一定位组件接触,第二定位组件用于与安装座进行位置固定。
7.优选的,第一复位组件包括第一圆形安装板和固定螺栓,第一圆形安装板的轴线与安装座的轴线平行,第一圆形安装板上开设有配合第一定位组件滑动的第一通孔,第一圆形安装板上开设有第一限位滑槽,第一限位滑槽的长度方向与第一圆形安装板的直径方向平行,限位板上固定设置有配合第一限位滑槽滑动的第一限位凸起,固定螺栓与第一限
位凸起固定连接,固定螺栓滑动设置在第一限位滑槽中。
8.优选的,第一圆形安装板上固定设置有限位条,第一复位组件还包括电磁铁,电磁铁固定设置在限位条靠近第一圆形安装板轴心的一面上,电磁铁与手柄电连接,限位板滑动设置在第一圆形安装板轴心和限位条之间,限位板上固定设置有与电磁铁配合工作的磁条。
9.优选的,第一复位组件还包括第一弹簧,第一弹簧固定设置在第一限位滑槽中,第一弹簧的轴线与第一限位滑槽的长度方向平行,第一弹簧与第一限位凸起靠近限位条的一端固定连接。
10.优选的,限位板上的固定设置有若干个防滑条,所有的防滑条均沿限位板的滑动方向均匀设置。
11.优选的,固定槽整体呈“u”型,固定槽的开口处朝向远离限位条的方向设置。
12.优选的,第一通孔为阶梯孔,第一通孔之间小的一端朝向远离手柄的方向设置,第一定位组件包括固定套筒、定位轴和第二弹簧,固定套筒固定设置在第一通孔中,固定套筒与第一通孔同轴设置,固定套筒的内部上开设有第二限位滑槽,第二限位滑槽的长度方向与固定套筒的轴线平行,定位轴与固定套筒同轴滑动连接,定位轴的侧壁上固定设置有与第二限位滑槽滑动配合的第二限位凸起,第二限位凸起不设置在定位轴的两端,第二弹簧固定设置在第二限位滑槽中,第二弹簧的轴线与第二限位滑槽的长度方向平行,第二弹簧与第二限位凸起远离限位板的一端固定连接,限位板上开设有配合定位轴滑动的斜面。
13.优选的,第二限位凸起的数量为两个,两个限位凸起围绕定位轴的轴线均匀设置。
14.优选的,固定套筒的外侧壁上开设有外螺纹,第一通孔上开设有配合固定套筒的内螺纹。
15.优选的,第二定位组件与第一定位组件结构相同,第二定位组件中的定位轴靠近第一复位组件的端部固定设置有第二限位凸起,第二复位组件上开设有配合第二定位组件工作的第二通孔,第二通孔与第一通孔结构相同且同轴设置,安装座上开设有配合定位轴工作的第三通孔,第三通孔与第二通孔同轴设置。
16.本技术相比较于现有技术的有益效果是:
17.本发明通过限位板和第一定位组件实现了完成摇杆、第一复位组件和第二复位组件进行位置固定的功能,通过第二定位组件实现了第二复位组件和安装座进行位置固定的功能,从而使得通过滑动限位板便快速方便的完成对摇杆四个方向的固定工作。
附图说明
18.图1是一种无人机操纵器的3d摇杆的立体示意图;
19.图2是一种无人机操纵器的3d摇杆中安装座使用状态的立体示意图;
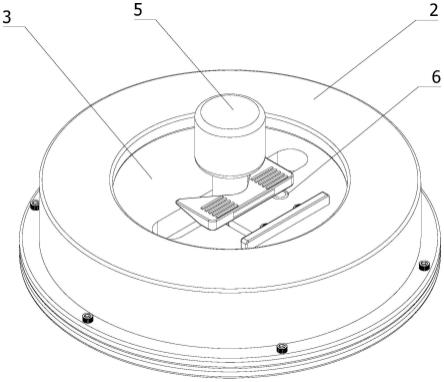
20.图3是一种无人机操纵器的3d摇杆中安装座关闭状态的立体示意图;
21.图4是一种无人机操纵器的3d摇杆中安装座的立体分解示意图;
22.图5是一种无人机操纵器的3d摇杆中第一复位组件的立体示意图;
23.图6是一种无人机操纵器的3d摇杆中第一复位组件的立体分解示意图;
24.图7是一种无人机操纵器的3d摇杆中第一定位组件的立体示意图;
25.图8是一种无人机操纵器的3d摇杆中第一定位组件的立体分解示意图;
26.图9是一种无人机操纵器的3d摇杆中第二复位组件的立体示意图;
27.图10是一种无人机操纵器的3d摇杆中第二复位组件的立体分解示意图。
28.图中标号为:
29.1-手柄;
30.2-安装座;
31.21-第三通孔;
32.3-第一复位组件;
33.31-限位板;311-固定槽;312-第一限位凸起;313-磁条;314-防滑条;
34.32-第一圆形安装板;321-第一通孔;322-第一限位滑槽;323-限位条;
35.33-固定螺栓;
36.34-电磁铁;
37.35-第一弹簧;
38.4-第二复位组件;
39.41-第二通孔;
40.5-摇杆;
41.6-第一定位组件;
42.61-固定套筒;611-第二限位滑槽;
43.62-定位轴;621-第二限位凸起;
44.63-第二弹簧;
45.7-第二定位组件。
具体实施方式
46.为能进一步了解本发明的特征、技术手段以及所达到的具体目的、功能,下面结合附图与具体实施方式对本发明作进一步详细描述。
47.参见图1至图10所示,一种无人机操纵器的3d摇杆,包括手柄1、安装座2、第一复位组件3、第二复位组件4和摇杆5,还包括第一定位组件6和第二定位组件7,安装座2整体呈圆柱状,第一复位组件3能够活动的设置在第二复位组件4上方,第一复位组件3远离第二复位组件4的主面上滑动设置有限位板31,限位板31上开设有与摇杆5杆部相吻合的固定槽311,限位板31的滑动方向与安装座2的直径方向平行,第一定位组件6滑动设置在第一复位组件3上,第一定位组件6的滑动方向与安装座2的轴线平行,第一定位组件6处于限位板31的移动路径上,第一定位组件6用于与第二复位组件4进行位置固定,第二定位组件7滑动设置在第二复位组件4上,第二定位组件7的滑动方向与安装座2的轴线平行,第二定位组件7与第一定位组件6接触,第二定位组件7用于与安装座2进行位置固定。
48.当工作人员使用完毕时停止操作摇杆5,此时推动限位板31进行移动向靠近摇杆5的方向移动,限位板31沿着安装座2的直径方向朝摇杆5靠近,限位板31在移动过程中将接触第一定位组件6,第一定位组件6与限位板31接触后将进行移动,第一定位组件6沿安装座2的轴线方向朝下移动从而完成与第二驱动复位组件的位置固定,与第一定位组件6接触的第二定位组件7也进行移动,第二定位组件7也沿着安装座2的轴线方向朝下移动从而完成与安装座2的位置固定,当限位板31移动到最大位置,限位板31的凹槽卡住摇杆5的杆部完
成位置固定,此时安装座2、第一驱动复位组件、第二驱动复位组件和摇杆5之间完成固定,当控制限位板31远离摇杆5时,第一定位组件6和第二定位组件7将解除与之相应的位置固定,相比较于现有技术,本技术的限位板31和第一定位组件6配合完成摇杆5、第一复位组件3和第二复位组件4之间的位置固定,第二定位组件7完成第二复位组件4和安装座2之间的位置固定,从而通过滑动限位板31便快速方便的完成对摇杆5四个方向的固定工作。
49.参见图4至图6所示:第一复位组件3包括第一圆形安装板32和固定螺栓33,第一圆形安装板32的轴线与安装座2的轴线平行,第一圆形安装板32上开设有配合第一定位组件6滑动的第一通孔321,第一圆形安装板32上开设有第一限位滑槽322,第一限位滑槽322的长度方向与第一圆形安装板32的直径方向平行,限位板31上固定设置有配合第一限位滑槽322滑动的第一限位凸起312,固定螺栓33与第一限位凸起312固定连接,固定螺栓33滑动设置在第一限位滑槽322中。
50.推动限位板31进行移动,限位板31移动过程中由于固定螺栓33的存在,第一限位凸起312始终卡接在第一限位滑槽322中,由于第一限位凸起312和第一限位滑槽322始终保持接触,限位板31只能保持一个状态进行移动,相比较于现有技术,本技术的第一限位凸起312、第一限位滑槽322和固定螺栓33对限位板31的移动状态进行限定,从而保证限位板31移动时不会发生旋转等其它运动出现。
51.参见图4至图6所示:第一圆形安装板32上固定设置有限位条323,第一复位组件3还包括电磁铁34,电磁铁34固定设置在限位条323靠近第一圆形安装板32轴心的一面上,电磁铁34与手柄1电连接,限位板31滑动设置在第一圆形安装板32轴心和限位条323之间,限位板31上固定设置有与电磁铁34配合工作的磁条313。
52.使用手柄1时启动电源,此时推动限位板31向远离摇杆5的方向移动,当限位板31移动到最大距离,此时磁条313和通电的电磁铁34通过磁力相互吸引,从而固定住限位板31的位置,当手柄1使用完毕时关闭电源,此时电磁铁34不通电则无法产生磁力,此时可以推动限位板31向靠近摇杆5的方向移动,相比较于现有技术,本技术的限位条323、电磁铁34和磁条313配合使得使用摇杆5时限位板31的位置不会随意发生改变,从而避免使用摇杆5时限位板31向摇杆5靠近阻止摇杆5的摆动。
53.参见图4至图6所示:第一复位组件3还包括第一弹簧35,第一弹簧35固定设置在第一限位滑槽322中,第一弹簧35的轴线与第一限位滑槽322的长度方向平行,第一弹簧35与第一限位凸起312靠近限位条323的一端固定连接。
54.使用手柄1时启动电源,此时电磁铁34通电可以与磁条313之间进行磁力配合,此时推动限位板31向远离摇杆5的方向移动,第一弹簧35被不断压缩,当限位板31移动到最大距离,此时限位板31位置被固定,第一弹簧35处于压缩状态,关闭手柄1电源,此时电磁铁34不再产生磁力,第一弹簧35解除压缩状态提供推力,限位板31自动向靠近摇杆5的方向移动,相比较于现有技术,本技术的第一弹簧35使得手柄1不适用时关闭电源限位板31将自动固定摇杆5的位置,从而使得工作人员无需关闭手柄1电源后再次滑动限位板31使其固定住摇杆5的位置。
55.参见图5至图6所示:限位板31上的固定设置有若干个防滑条314,所有的防滑条314均沿限位板31的滑动方向均匀设置。
56.使用手柄1时启动电源,此时电磁铁34通电可以与磁条313之间进行磁力配合,随
后工作人员将手指按压在防滑条314上推动限位板31进行移动,相比较于现有技术,本技术的防滑条314使得工作人员手指和限位板31之间的摩擦力较大,从而避免因为第一弹簧35压缩时产生的弹力导致限位板31与工作人员手指之间发生相对滑动。
57.参见图5至图6所示:固定槽311整体呈“u”型,固定槽311的开口处朝向远离限位条323的方向设置。
58.当手柄1使用完毕时关闭电源,此时电磁铁34不通电则无法产生磁力,第一弹簧35解除压缩状态提供推力,限位板31自动向靠近摇杆5的方向移动,固定槽311的两端先与摇杆5杆身接触从而使其移动到安装座2的中心处,相比较于现有技术,本技术的固定槽311使得摇杆5被固定时处于安装座2的中心处,从而避免安装座2弹性不能使摇杆5回弹至中心处接受固定的情况出现。
59.参见图6至图8所示:第一通孔321为阶梯孔,第一通孔321之间小的一端朝向远离手柄1的方向设置,第一定位组件6包括固定套筒61、定位轴62和第二弹簧63,固定套筒61固定设置在第一通孔321中,固定套筒61与第一通孔321同轴设置,固定套筒61的内部上开设有第二限位滑槽611,第二限位滑槽611的长度方向与固定套筒61的轴线平行,定位轴62与固定套筒61同轴滑动连接,定位轴62的侧壁上固定设置有与第二限位滑槽611滑动配合的第二限位凸起621,第二限位凸起621不设置在定位轴62的两端,第二弹簧63固定设置在第二限位滑槽611中,第二弹簧63的轴线与第二限位滑槽611的长度方向平行,第二弹簧63与第二限位凸起621远离限位板31的一端固定连接,限位板31上开设有配合定位轴62滑动的斜面。
60.当手柄1进行使用时限位板31远离摇杆5,此时定位轴62在第二弹簧63的工作上突出第一圆形安装板32,当手柄1使用完毕时关闭电源,此时电磁铁34不通电则无法产生磁力,第一弹簧35解除压缩状态提供推力,限位板31自动向靠近摇杆5的方向移动,限位板31的斜面先与定位轴62接触,定位轴62随着限位板31的水平移动进行垂直方向的移动,第二弹簧63被压缩,定位轴62移动至第二复位组件4中完成位置固定,当启动手柄1电源并时限位板31远离摇杆5时,第二弹簧63解除压缩状态推动定位轴62沿垂直方向上移,此时定位轴62解除与第二复位组件4的位置固定,相比较于现有技术,本技术的固定套筒61、定位轴62和第二弹簧63使得限位板31移动时第一定位组件6跟随其进行工作,从而减轻工作人员的使用负担。
61.参见图7至图8所示:第二限位凸起621的数量为两个,两个限位凸起围绕定位轴62的轴线均匀设置。
62.定位轴62与限位板31接触时两个第二限位凸起621将始终与第二限位滑槽611接触,定位轴62端部受到的力可以均匀分散到定位轴62的侧壁,相比较于现有技术,本技术的第二限位凸起621限定数量和位置使得定位轴62均匀受力,从而提高第一定位组件6的使用寿命。
63.参见图6至图8所示:固定套筒61的外侧壁上开设有外螺纹,第一通孔321上开设有配合固定套筒61的内螺纹。
64.将固定套筒61与第一通孔321同轴对齐,随后旋转固定套筒61使得固定套筒61与第一通孔321完成固定,相比较于现有技术,本技术的固定套筒61和第一通孔321通过螺纹连接使得安装和拆卸更为方便,从而使得工作人员可以快速进行更换零件。
65.参见图4至图10所示:第二定位组件7与第一定位组件6结构相同,第二定位组件7中的定位轴62靠近第一复位组件3的端部固定设置有第二限位凸起621,第二复位组件4上开设有配合第二定位组件7工作的第二通孔41,第二通孔41与第一通孔321结构相同且同轴设置,安装座2上开设有配合定位轴62工作的第三通孔21,第三通孔21与第二通孔41同轴设置。
66.限位板31远离摇杆5时,第二定位组件7中的定位轴62最高点与第一圆形安装板32的底面平行,相比较于现有技术,本技术的第二定位组件7中的定位轴62无法对第一复位组件3和第二复位组件4进行位置固定,从而避免限位板31远离摇杆5时第一复位组件3和第二复位组件4之间无法相对移动。
67.以上实施例仅表达了本发明的一种或几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1