一种基于机器人实时操作系统的EtherCATIgh主站运行方法与流程
一种基于机器人实时操作系统的ethercat igh主站运行方法
技术领域
1.本发明涉及控制通信技术领域,具体为一种基于机器人实时操作系统的 ethercat igh主站运行方法。
背景技术:
2.随着工业、人工智能技术的飞速发展,大量的传统制造行业逐渐向智能制 造方向转型。尤其是工业控制领域,国家对高新技术企业的大力发展和关注, 控制设备与被控设备之间的通信要求也是日渐提高。在通信方面,由于不同的 控制系统的发展和通信规范不尽相同,很难达到一致。如果将其应用于现代化 的工业机器人通信系统,满足不了高带宽、低延时和高同步的要求,且其成本 相对昂贵,功能单一兼容性差的传统现场总线严重约束其发展,对整个工业机 器人控制系统的性能影响严重。
3.在工业控制领域中,控制设备的稳定性,控制设备间的及时性在整个控制 系统中起着十分重要的作用。为实现控制系统的正常运行,控制设备和被控设 备之间的通信问题十分突出。然而实际情况下,通信时可能会因为硬件的时钟 不同步而造成时间抖动现象,外部环境的影响也会造成数据传输的丢失和延时, 在这种情况下控制系统的性能就会受到一定程度的影响。因此控制系统之间的 时钟精确同步问题在工业控制领域非常重要。科技发展过程中,符合工业控制 的通信协议层出不穷,如modbus tcp/ip、profinet、ethernet/ip等受到广泛 支持。其中,ethercat现场总线协议是德国倍福(beckhoff)公司在2003年提 出的一种开放实时以太网协议。ethercat现场总线协议因其实时性高、确定性 高、响应速度快、同步性能高等特点,在工业控制领域得到广泛应用。
4.现代化工业机器人的发展主要集中在生产线制造,而工业机器人生产线制 造的发展主要集中在将人工智能、新能源、数字赋能、物联网等新型科技集成 方向。为了进一步提升近代工业领域水平,以及提高工业机器人的柔性化运动, 让以太网技术运用在自动化应用中,大量企业和科研人员对ethercat通信技术 进行了优化和改进。在这个数据爆炸的年代,当越来越多的传感器设备被安装 到实体工业机器人上时,工业的数据传输量会发生“指数式”的增长。面对数 据的急剧增长,ethercat通信协议的优化和改善是目前急需解决的问题,如何 提高通信过程中的实时性和同步性是目前工业控制领域的一个必然趋势。
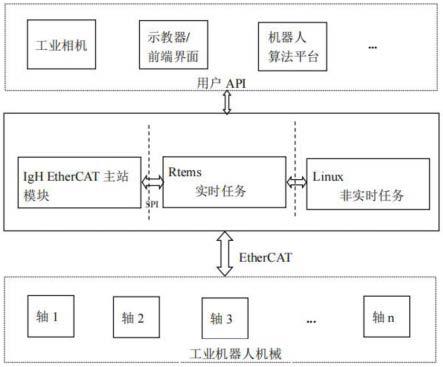
5.现有技术主要是在linux或者windows操作系统下融合ethercat主站 通信协议模块,再通过ethercat协议与从站通信,进而控制工业机器人的运作, 如图1所示。该种方案中,在linux系统上部署ethercat主站,实现与工业 机器人本体之间的数据传输,与此同时在linux上编写相应的工业机器人算 法,实现对工业机器人的运动控制。该方法中实时、非实时任务都由linux运 行相应的处理,实时性能较差,无法满足工业机器人高速响应的要求;所有任 务都在一个系统中,无法保证工业机器人运行的稳定性;同时,外部环境因素 的问题也会引起通信延时、数据丢失等问题,不利于工业机器人运动的发展。
6.申请号为cn202111534975.9“一种基于ethercat总线的机器人控制系统 及方法”,该专利提供一种基于ethercat总线的机器人控制系统及方法,采用 硬件ethercat主
站方案,保证通信总线的实时性和稳定性;该专利从硬件的角 度进行通信系统的实时性优化,依赖于外部硬件,不利于进一步的开发。
7.申请号为cn202210092816.6,名称为“一种ethercat总线主站和从站实 时同步方法”,该专利提供一种ethercat总线主站和从站实时同步方法,应用 于伺服系统,不利于其他场景的移植应用。
8.申请号为202010220622.0“一种基于非实时系统的ethercat主站同步方 法”,该专利提供一种基于非实时系统的ethercat主站同步方法,该专利采用 非实时系统和普通网卡的软主站方式由于非实时系统的定时精度很差,通讯不 稳定性,容易产生各种连接或超时错误。
技术实现要素:
9.为了解决上述技术问题,本发明提出了一种基于机器人实时操作系统的 ethercat igh主站运行方法。
10.本发明所要解决的技术问题采用以下技术方案来实现:
11.一种基于机器人实时操作系统的ethercat igh主站运行方法,包括步骤如 下:
12.步骤(一)利用分层架构策略思想,搭建适用且兼容于机器人实时操作系 统的实时通信协议的ethercat igh主站架构;
13.步骤(二)在ethercat igh主站架构中的上层用户单元内,设计提供应用 程序接口,实现请求主站及配置应用逻辑,同时在上层用户单元中完成运行循 环代码和交换过程数据;
14.步骤(三)在ethercat igh主站架构中的内核单元内,在机器人实时操作 系统中适配ethercat igh主站,通过对其相应的网络驱动程序以及网络协议进 行兼容性的修改优化;
15.步骤(四)在ethercat igh主站架构中的下层硬件单元内,由内核单元中 设计提供总线位置及相应的从站配置接口,通过绝对总线位置或通过保存的“别 名”的标识符或两者的混合来对从站寻址。
16.优选地,步骤(一)中的主站代码架构为二次开发优化的ethercat igh主 站架构,利用linux+rtems双内核的思路,对实时、非实时任务进行拆分执行。
17.优选地,二次开发优化的ethercat igh主站架构通过锁定信号量实现多个 ethercat igh主站实例并行运行的逻辑,具体为:
18.预定主站的应用程序必须具有完全控制锁定机制;如果另一个ethercat igh 主站实例想要访问主站,则必须通过由应用程序提供的回调请求总线访问;如 果应用程序认为该ethercat igh主站实例在当时是不合适的,则可以拒绝对主 机的访问。
19.优选地,二次开发优化的ethercat igh主站架构引入允许对具有不同从组 和任务周期的过程数据传输进行分组的域,自动计算每个域内的过程数据映射, fmmu和同步管理器配置;支持分布式时钟,通过应用程序接口配置从站的dc参 数,同时提供漂移补偿。
20.优选地,步骤(一)中的ethercat igh主站架构包括上层用户单元、内核 单元、下层硬件单元、以太网控制器intel网卡和realtek网卡改进的本地 ethercat加速网络驱动接口。
21.优选地,所述上层用户单元用于为用户提供相应的应用程序接口;所述内 核单元主要完成ethercat igh主站相应的核心功能;所述下层硬件单元主要实 现对从站部分的设置和维护功能。
22.优选地,步骤(三)中的内核单元集成了ethercat igh主站的相应功能, 包括:
23.读取从站设备描述xml文件并对其进行解析,获取其中配置参数;
24.捕获和发送ethercat数据帧,完成ethercat子报文解析、打包;
25.管理从站设备状态,运行状态机,完成主从站状态机设置和维护;
26.进行非周期性数据通信,完成系统参数配置,处理通讯过程中突发事件;
27.实现周期性过程数据通信、数据实时交换,实时监控从站状态,从站反馈, 信号实时处理。
28.优选地,步骤(三)中的ethercat igh主站在机器人实时操作系统中对其 进行集成,在该部分以静态和动态链接库的形式提供相关应用程序接口,包括 主站参数配置、主从站数据通信函数,支持coe应用程序。
29.本发明的有益效果是:
30.本发明在ethercat以太网通信技术的基础上,通过合理设计分层策略架构, 实现在机器人实时操作系统(rtems)中运行ethercat igh主站;利用机器人 实时操作系统中网络驱动的特性与ethercat igh主站的特点,设计优化兼容接 口,解决了兼容性差、通信速率低等问题,从而提高了工业机器人的运动柔性 化发展;与此同时,更改任务执行方式,扩展linux内核,利用双内核架构, 将实时任务与非实时任务分开执行,减轻了操作系统的分担,提高了系统资源 利用率。
31.与现有的方案相比,本发明在降低硬件成本的同时获取了可靠的通信效果, 满足了实际工业应用的需求,具有实际应用和推广价值,与此同时,在相应的 工业技术领域拓宽了新的应用思路和架构,为工业机器人行业的发展指明了航 向标。
附图说明
32.下面结合附图和实施例对本发明进一步说明:
33.图1为现有技术方案的结构示意图;
34.图2为本发明的结构示意图。
具体实施方式
35.为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解, 下面结合附图以及实施例对本发明进一步阐述。
36.如图2所示,一种基于机器人实时操作系统的ethercat igh主站运行方法, 包括步骤如下:
37.步骤(一)利用分层架构策略思想,搭建适用且兼容于机器人实时操作系 统的实时通信协议的ethercat igh主站架构。
38.步骤(一)中的主站代码架构为二次开发优化的ethercat igh主站架构, 利用linux+rtems双内核的思路,对实时、非实时任务进行拆分执行。
39.二次开发优化的ethercat igh主站架构通过锁定信号量实现多个ethercatigh
主站实例并行运行的逻辑,具体为:预定主站的应用程序必须具有完全控制 锁定机制;如果另一个ethercat igh主站实例想要访问主站,则它必须通过由 应用程序提供的回调请求总线访问;如果应用程序认为该实例在当时是不合适 的,则可以拒绝对主机的访问。
40.二次开发优化的ethercat igh主站架构引入允许对具有不同从组和任务周 期的过程数据传输进行分组的域,自动计算每个域内的过程数据映射,fmmu和 同步管理器配置;支持分布式时钟,通过应用程序接口配置从站的dc参数,同 时提供了漂移补偿。
41.ethercat igh主站架构包括上层用户单元、内核单元、下层硬件单元、以 太网控制器intel网卡和realtek网卡改进的本地ethercat加速网络驱动接口。
42.其中,所述上层用户单元用于为用户提供相应的应用程序接口;所述内核 单元主要完成ethercat igh主站相应的核心等功能;所述下层硬件单元主要实 现对从站部分的设置和维护等功能。
43.步骤(二)在ethercat igh主站架构中的上层用户单元内,设计提供应用 程序接口,实现请求主站及配置应用逻辑,同时在上层用户单元中完成运行循 环代码和交换过程数据。
44.步骤(三)在ethercat igh主站架构中的内核单元内,在机器人实时操作 系统中适配ethercat igh主站,通过对其相应的网络驱动程序以及网络协议进 行兼容性的修改优化。
45.步骤(三)中的内核单元集成了ethercat igh主站的相应功能,包括:读 取从站设备描述xml文件并对其进行解析,获取其中配置参数;捕获和发送 ethercat数据帧,完成ethercat子报文解析、打包;管理从站设备状态,运行 状态机,完成主从站状态机设置和维护;进行非周期性数据通信,完成系统参 数配置,处理通讯过程中突发事件;实现周期性过程数据通信、数据实时交换, 实时监控从站状态,从站反馈,信号实时处理等。
46.步骤(三)中的ethercat igh主站在机器人实时操作系统中对其进行集成, 在该部分以静态和动态链接库的形式提供相关应用程序接口,包括主站参数配 置、主从站数据通信函数,支持coe应用程序。
47.步骤(四)在ethercat igh主站架构中的下层硬件单元内,由内核单元中 设计提供总线位置及相应的从站配置接口,通过绝对总线位置或通过保存的“别 名”的标识符或两者的混合来对从站寻址。
48.所述下层硬件单元,通过创建“从站配置”完成主站有关预期总线拓扑的 消息通知,与此同时完成主从站状态机设置和维护的相应逻辑。
49.以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业 的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中 描述的只是本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会 有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明 要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1