自移动设备的行驶方法及装置、存储介质及电子装置与流程
【】本发明涉及通信领域,具体而言,涉及一种自移动设备的行驶方法及装置、存储介质及电子装置。
背景技术
0、
背景技术:
1、随着科技的发展,越来越多的人开始在日常生活中使用智能设备进行卫生清扫工作,如扫地机器人等,其中,扫地机器人能够自主地移动到不同区域,以在不同区域执行清扫任务。
2、现有的自移动设备(例如,扫地机器人)一般使用位置检测传感器(positionsensitive detector,简称为psd)、红外、激光雷达传感器(laser docking sensor,简称为lds)等传感器来感知障碍物,但这些传感器均会存在感知盲点,通常这些传感器设置于自移动设备的顶部或侧边,导致对于近距离的、低矮的障碍物无法识别,譬如低矮t脚线,低矮突起障碍物等;又例如玻璃门窗等自移动设备识别不出的障碍物,均会给自移动设备的行驶造成影响。
3、现有技术中仅能通过为自移动设备设置机械撞板来减轻碰撞造成的损坏,无法从根本上解决这一问题。
4、针对现有技术中,自移动设备在存在识别不到障碍物的区域行驶,无法规划行驶路线等问题,目前尚未提出有效的解决方案。
技术实现思路
0、
技术实现要素:
1、本发明实施例提供了一种自移动设备的行驶及装置、存储介质及电子装置,以至少解决现有技术中,自移动设备在存在识别不到障碍物的区域行驶,无法规划行驶路线的问题。
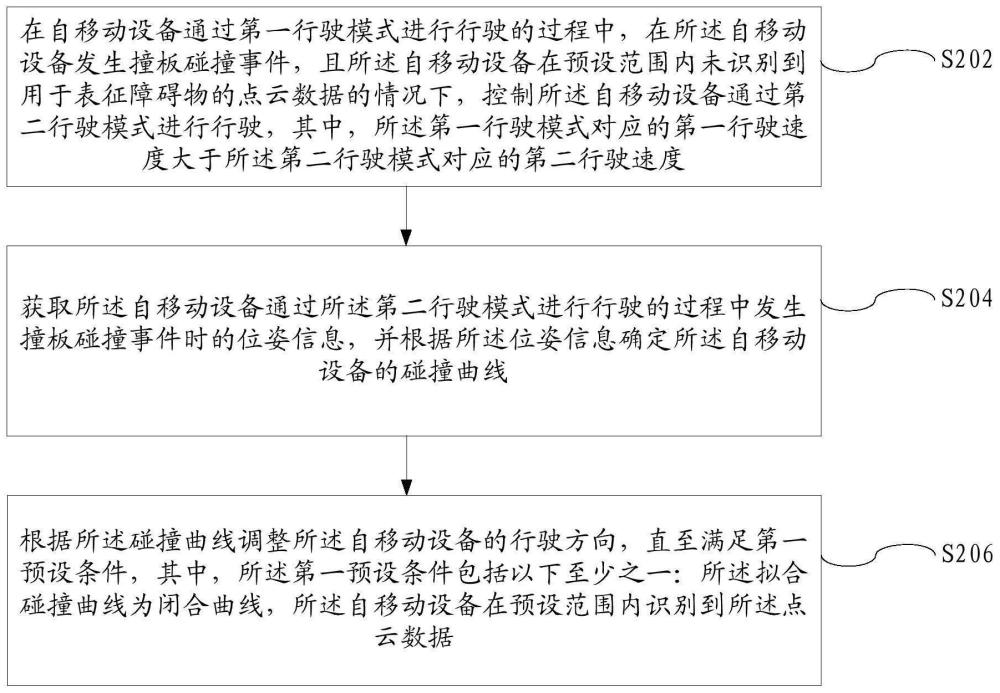
2、根据本发明实施例的一方面,提供一种自移动设备的行驶方法,包括:在自移动设备通过第一行驶模式进行行驶的过程中,在所述自移动设备发生撞板碰撞事件,且所述自移动设备在预设范围内未识别到用于表征障碍物的点云数据的情况下,控制所述自移动设备通过第二行驶模式进行行驶,其中,所述第一行驶模式对应的第一行驶速度大于所述第二行驶模式对应的第二行驶速度;获取所述自移动设备通过所述第二行驶模式进行行驶的过程中发生撞板碰撞事件时的位姿信息,并根据所述位姿信息确定所述自移动设备的碰撞曲线;根据所述碰撞曲线调整所述自移动设备的行驶方向,直至满足第一预设条件,其中,所述第一预设条件包括以下至少之一:所述碰撞曲线为闭合曲线,所述自移动设备在预设范围内识别到所述点云数据。
3、在一个示例性实施例中,获取所述自移动设备通过所述第二行驶模式进行行驶的过程中发生撞板碰撞事件时的位姿信息,并根据所述位姿信息确定所述自移动设备的碰撞曲线,包括:在所述自移动设备通过所述第二行驶模式进行行驶的过程中,持续获取所述自移动设备发生所述撞板碰撞事件的多个位姿信息;根据所述多个位姿信息所指示的所述自移动设备的位置坐标和设备朝向确定所述自移动设备发生所述撞板碰撞事件的多个碰撞点的位置坐标;对所述多个碰撞点的位置坐标进行曲线拟合,以得到所述自移动设备的碰撞曲线。
4、在一个示例性实施例中,根据所述碰撞曲线调整所述自移动设备的行驶方向,直至满足第一预设条件之后,所述方法还包括:在所述自移动设备进行当前清扫的下一轮清扫的情况下,根据所述碰撞曲线确定第一预设距离;在所述自移动设备行驶到目标位置时,控制所述自移动设备按照第三行驶速度进行行驶,其中,所述第三行驶速度小于所述第一行驶速度,其中,所述目标位置与所述碰撞曲线的最近距离小于所述第一预设距离;确定所述自移动设备是否在所述碰撞曲线的任一位置是否再次发生撞板碰撞事件;根据是否再次发生撞板碰撞事件的结果确定是否对所述第一预设距离进行调整。
5、在一个示例性实施例中,根据所述碰撞曲线确定第一预设距离,包括:在确定所述碰撞曲线的形状和面积大小满足第二预设条件的情况下,将所述第一预设距离设置为第一预设数值,其中,所述第二预设条件包括:所述碰撞曲线的形状为规则形状,所述碰撞曲线的面积大小大于预设面积阈值;在确定所述碰撞曲线的形状和面积大小不满足所述第二预设条件的情况下,将所述第一预设距离设置为第二预设数值,其中,所述第二预设数值大于所述第一预设数值。
6、在一个示例性实施例中,根据是否再次发生撞板碰撞事件的结果确定是否对所述第一预设距离进行调整,包括:在所述自移动设备在所述碰撞曲线的任一位置再次发生撞板碰撞事件的情况下,将所述第一预设距离调整为第二预设距离,其中,所述第二预设距离小于所述第一预设距离。
7、在一个示例性实施例中,根据是否再次发生撞板碰撞事件的结果确定是否对所述第一预设距离进行调整,包括:在所述自移动设备在所述碰撞曲线的任一位置未再次发生撞板碰撞事件的情况下,控制所述自移动设备按照所述第一行驶速度进行行驶。
8、在一个示例性实施例中,在所述自移动设备在所述碰撞曲线的任一位置未再次发生撞板碰撞事件的情况下,控制所述自移动设备按照所述第一行驶速度进行行驶之后,所述方法还包括:在所述自移动设备进行清扫的次数超过第三预设数值,且所述自移动设备在所述碰撞曲线的任一位置均未再次发生撞板碰撞事件的情况下,控制所述自移动设备删除所述碰撞曲线。
9、根据本发明实施例的另一方面,还提供一种自移动设备的行驶装置,所述装置包括:控制模块,用于在自移动设备通过第一行驶模式进行行驶的过程中,在所述自移动设备发生撞板碰撞事件,且所述自移动设备在预设范围内未识别到用于表征障碍物的点云数据的情况下,控制所述自移动设备通过第二行驶模式进行行驶,其中,所述第一行驶模式对应的第一行驶速度大于所述第二行驶模式对应的第二行驶速度;获取模块,用于获取所述自移动设备通过所述第二行驶模式进行行驶的过程中发生撞板碰撞事件时的位姿信息,并根据所述位姿信息确定所述自移动设备的碰撞曲线;调整模块,用于根据所述碰撞曲线调整所述自移动设备的行驶方向,直至满足第一预设条件,其中,所述第一预设条件包括以下至少之一:所述碰撞曲线为闭合曲线,所述自移动设备在预设范围内识别到所述点云数据。
10、根据本发明实施例的又一方面,还提供了一种计算机可读的存储介质,该计算机可读的存储介质中存储有计算机程序,其中,该计算机程序被设置为运行时执行上述自移动设备的行驶方法。
11、根据本发明实施例的又一方面,还提供了一种电子装置,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其中,上述处理器通过计算机程序执行上述自移动设备的行驶方法。
12、在本发明实施例中,在自移动设备通过第一行驶模式进行行驶的过程中,在所述自移动设备发生撞板碰撞事件,且所述自移动设备在预设范围内未识别到用于表征障碍物的点云数据的情况下,控制所述自移动设备通过第二行驶模式进行行驶,其中,所述第一行驶模式对应的第一行驶速度大于所述第二行驶模式对应的第二行驶速度;获取所述自移动设备通过所述第二行驶模式进行行驶的过程中发生撞板碰撞事件时的位姿信息,并根据所述位姿信息确定所述自移动设备的碰撞曲线;根据所述碰撞曲线调整所述自移动设备的行驶方向,直至满足第一预设条件,其中,所述第一预设条件包括以下至少之一:所述碰撞曲线为闭合曲线,所述自移动设备在预设范围内识别到所述点云数据;即按照第二行驶模式行驶直至自移动设备沿着该障碍物行驶一周或该自移动设备检测到了点云数据,可以参照点云数据进行行驶。采用上述技术方案,解决了现有技术中,自移动设备在存在识别不到障碍物的区域行驶,无法规划行驶路线的问题;实现了自移动设备在存在识别不到的障碍物的区域中仍能规划行驶路线,以减少碰撞对自移动设备造成的损坏的技术效果。
- 还没有人留言评论。精彩留言会获得点赞!