室内静态物品识别与自主建图的移动机器人及工作方法
1.本发明属于智能机器人领域,具体涉及一种室内静态物品识别与自主建图的移动机器人及工作方法。
背景技术:
2.slam(同步定位和绘图)是一种允许机器人自己绘制地图的技术。这是一种当机器人移动到未知空间时,通过检测周围环境来估计当前位置并绘制地图的方法。slam可分为两种算法,包括激光slam和视觉slam。现有的建图机器人通常采用单一的激光雷达进行图像构建,而且需要人的直接参与,降低了建图的精准度,智能化程度低,难以实现自主建图,同时单种传感器的检测导致制图的精准度和完整度不足。
技术实现要素:
3.发明目的:本发明的目的在于提供一种室内静态物品识别与自主建图的移动机器人及工作方法,机器人无需人工驱动和控制,能够在室内环境下自动绘制大面积地图,同时能够将室内物品信息列如门,窗等静止物体的信息在地图上进行标注。本发明室内建图智能化程度高,并有效提高了建图精准度。
4.技术方案:本发明的室内静态物品识别与自主建图的移动机器人,包括建图机器人本体,所述建图机器人本体自下而上依次为机器人底盘,中间层和顶层;所述机器人底盘上设置运动模块和电源模块,中间层和顶层上设置智能驱动模块;所述智能驱动模块包括单板计算机、多个超声波传感器、人工智能摄像头、机器人控制板、激光雷达;所述单板计算机、超声波传感器、激光雷达分别与机器人控制板连接;所述单板计算机的控制系统采用ros系统,人工智能摄像头与单板计算机连接;多个所述超声波传感器安装机器人的不同位置,用于测量建图机器人本体周围静态物品与机器人之间的距离,并将测量结果发送至机器人控制板;所述激光雷达安装在顶层上方,用于扫描建图机器人本体周围环境;所述人工智能摄像头与单板计算机连接,人工智能摄像头识别室内静止物的位置信息,并将静止物在地图上的坐标发送至单板计算机;所述机器人在其感兴趣的区域内根据识别到的静止物品信息,规划移动路径,直至完成室内地图的扫描。
5.所述运动模块包括驱动轮、从动轮、伺服电机及惯性传感器,驱动轮安装在机器人底盘和中间层之间,与伺服电机电气连接;所述从动轮安装在机器人底盘,与机器人底盘后侧连接;所述伺服电机和机器人控制板电气连接;所述惯性传感器安装在机器人中间层,内置于机器人控制板。
6.所述电源模块包括12v电源和电平转换器,12v电源与机器人控制板连接,12v电源通过电平转换器与单板计算机连接,12v电源通过电平转换器转成为单板计算机所需电源,为其供电。
7.本发明还包括一种室内静态物品识别与自主建图的移动机器人的工作方法,包括以下步骤:
8.(1)将室内自主建图智能机器人置于室内,启动机器人底盘,单板计算机开始基于平台的初始化,机器人获取当前状态位置信息;
9.(2)机器人以自身在地图中的位置为中心,通过多个超声波传感器获取机器人初始位置与其周围障碍物的多个距离信息,机器人控制板比较多个距离信息并确定机器人的移动方向,进而控制机器人向最近的障碍物行驶;
10.(3)机器人向最近的障碍物行驶的过程中,激光雷达检测机器人周围环境情况,智能驱动模块驱动机器人在感兴趣的区域内进行与环境相关的移动规划;
11.(4)在命令行终端运行ros系统中的修改后的teleop_key文件并在命令行终端运行,以机器人控制板返回的超声波传感器数据信息作为判断条件,根据与环境相关的移动规划,以合适的速度和方向控制机器人在室内自主移动,替代原本的键盘按键控制;
12.(5)在激光雷达扫描周围环境的同时,人工智能摄像头检测并记录室内物品信息,并将室内物品的属性以及物体在地图上的坐标信息保存;
13.(6)待智能驱动模块自动检测到室内地图已经扫描完成后,机器人停止移动并将扫描的地图进行保存;
14.(7)对初步扫描的地图进行图像处理,获得包含完整室内物品信息的地图。
15.步骤(3)中,所述智能驱动模块驱动机器人在感兴趣的区域内进行与环境相关的移动规划,具体为,所述智能驱动模块根据超声波传感器和人工智能摄像头的检测结果控制机器人在感兴趣的区域内移动机器人,并在移动时始终与区域外边沿保持距离。
16.步骤(7)中,所述对初步扫描的地图进行图像处理,具体如下:
17.(7.1)运行图像处理程序;
18.(7.2)提取检测到的室内物品在地图上的坐标信息;
19.(7.3)用opencv图像处理技术将对应的室内静止物品的信息在雷达扫描的地图上进行标注;
20.(7.4)保存最终的地图。
21.本发明的工作原理:利用智能驱动模块使机器人能够在室内自主导航,在激光雷达扫描的同时利用人工智能摄像头检测室内的物品信息并在地图上进行标注,最后利用图像处理技术建成完整的室内地图。
22.有益效果:本发明的技术方案与现有技术相比,其有益效果在于:(1)无需人工驱动和控制,智能驱动模块能够驱动机器人在室内环境下自动绘制大面积地图,并使用图像处理技术将屋内门,窗,桌等静止物品的信息进行标注,得到信息更丰富完整,准确度更高的室内环境地图,从而实现对室内地图的自动扫描;(2)与常规激光雷达扫描的地图相比,本发明生成的地图含有屋内门,窗,桌等静止物品的信息,地图信息更丰富完整,准确度较高。
附图说明
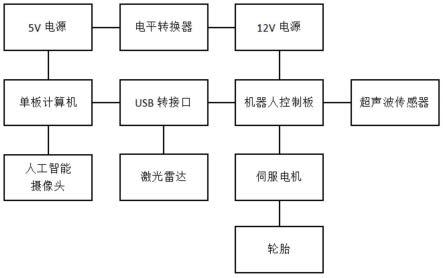
23.图1为本发明所述室内静态物品识别与自主建图的移动机器人的结构框图;
24.图2为本发明中ros系统的节点关系图;
25.图3为本发明中自主建图机器人建图的建图流程图。
具体实施方式
26.下面结合具体实施方式和说明书附图对本发明的技术方案进行详细介绍。
27.如图1所示,本发明的室内静态物品识别与自主建图的移动机器人包括建图机器人本体、运动模块、电源模块及智能驱动模块。建图机器人本体由三层构成,由下至上依次为机器人底盘,中间层和顶层。机器人底盘上设置运动模块和电源模块,智能驱动模块一部分部件安装在中间层,另一部分部件安装在顶层。运动模块包括驱动轮、从动轮、伺服电机、惯性传感器。驱动轮安装在机器人底盘和中间层之间,驱动轮的数量为两个,对称设置,且与伺服电机电气连接;从动轮安装在机器人底盘底部,数量为一个,与机器人底盘后侧连接;伺服电机和机器人控制板电气连接。本实施例中,伺服电机为马达变速装置,是在伺服系统中控制机械元件运转的发动机。伺服电机可以控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速。伺服电机转子转速受输入信号控制,并能快速反应。机电时间常数小、线性度高,当需要控制运动时,伺服电机可把所收到的电信号转换成电动机轴上的角位移或角速度输出。惯性传感器包含18个gpio引脚、32个arduino引脚,提供3.3v、5v4a和12v电源,其中三个rs485和三个ttl接口控制伺服电机。惯性传感器安装在机器人中间层,内置于机器人控制板,用于测量机器人的加速度、倾斜、旋转和自由运动,对里程计数据进行校正,并建立建图机器人移动数据。
28.电源模块包括12v电源和电平转换器,12v电源与机器人控制板连接,12v电源通过电平转换器与单板计算机连接,12v电源通过电平转换器转成为单板计算机所需电源,为其供电。顶层上安装开关,12v电源通过开启/关闭开关为机器人控制板供电。
29.智能驱动模块包括单板计算机、多个超声波传感器、人工智能摄像头、机器人控制板、激光雷达。单板计算机、超声波传感器、人工智能摄像头、激光雷达、机器人控制板均安装在中间层内部,激光雷达安装在顶层上方。单板计算机、超声波传感器、激光雷达分别与机器人控制板连接,人工智能摄像头与单板计算机连接。单板计算机的控制系统为ros系统,主要用于数据的处理和通信,图2为本发明中ros系统的节点关系图。超声波传感器的数量为两个,分别安装在机器人的前侧和后侧,可测量机器人与前方以及右方障碍物的最近的距离信息,并将测量结果发送至机器人控制板。人工智能摄像头检测室内静止物,如门,窗的位置信息,并将静止物在地图上的坐标发送至单板计算机。激光雷达扫描建图机器人本体周围环境。机器人根据接收的信息规划移动路径,直至完成室内地图的扫描。智能驱动模块能结合多传感器的数据与编写的软件使得机器人在室内环境自动行驶。本实施例中,机器人控制板的主控芯片为stm32型号。人工智能摄像头oak-d包含一个机载摄像头(一颗4k/30fps彩色摄像头,两颗黑白双目摄像头)和bno086 imu以及usb3接口,相机内置双目深度计算、ai神经网络推理,可实时3d对象定位跟踪。结合深度感知,目标检测和目标跟踪,可调用其中的python api实现对室内门,窗等静止物体的实时检测。激光雷达ydlidar g4是360度二维激光测距仪。基于三角测距原理,结合相关光、电、算法设计,实现高频高精度测距。在通电后,激光雷达开始旋转和扫描,可以通过通信接口(串口/usb)获取距离扫描点云数据,激光雷达用于slam建图与导航,并可在终端打开ros系统中的可视化显示模块rviz查看激光雷达的扫描结果。
30.如图3所示,本发明还包括一种室内静态物品识别与自主建图的移动机器人的工作方法,具体步骤如下:
31.(1)将室内自主建图智能机器人放入室内,启动机器人底座,单板计算机开始基于平台的初始化,机器人获取当前状态位置信息;
32.(2)机器人以自身在地图中的位置为中心,通过两个超声波传感器获取机器人初始位置与其周围障碍物的距离信息d1和d2,比较d1和d2确定机器人的移动方向并控制机器人向最近的障碍物行驶;
33.(3)机器人向最近的障碍物行驶过程中,激光雷达检测机器人周围环境情况,智能驱动模块将驱动机器人在感兴趣的区域内进行与环境相关的移动规划,该规划可以针对不同的环境进行变化,对于不同的环境机器人将采取不一样的移动规划。智能驱动模块将使用超声波传感器和摄像头控制机器人在感兴趣的区域内移动机器人,并在移动的同时始终保持与区域外边沿一定距离;
34.(4)在命令行终端运行ros系统中的修改后的teleop_key文件并在命令行终端运行,以机器人主控制板返回的超声波传感器数据信息作为判断条件,根据与环境相关的移动规划,以合适的速度和方向控制机器人在室内自主移动,替代原本的键盘按键控制;
35.(5)在激光雷达扫描周围环境的同时,人工智能摄像头检测并记录室内物品信息,如门,桌等室内固定物品,将室内物品的属性以及物体在地图上的坐标信息保存;
36.(6)待智能驱动模块自动检测到室内地图已经扫描完成后,机器人将停止移动并将扫描的地图进行保存;
37.(7)对初步扫描的地图进行图像处理,获得包含完整室内物品信息的地图;具体步骤为:
38.(7.1)运行图像处理程序map_object_processing.py;
39.(7.2)提取检测到的门,桌在地图上的坐标信息;
40.(7.3)利用opencv图像处理技术将对应的门,窗等室内静止物品的信息在雷达扫描的地图上进行标注;
41.(7.4)保存最终的地图。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1