一种无人设备控制方法、装置、存储介质及电子设备与流程
本说明书涉及自动驾驶领域,尤其涉及一种无人设备控制方法、装置、存储介质及电子设备。
背景技术:
1、目前,协作自适应巡航系统是一种用于控制无人设备编队的无人驾驶系统,在无人驾驶设备行驶过程中,协作自适应巡航系统能够控制无人驾驶设备编队中每一个无人驾驶设备纵向的运动状态,在保证安全性的前提下,缩短了无人驾驶设备之间的跟驰间距,以达到提高了道路的通行效率的目的。
技术实现思路
1、本说明书提供一种无人设备控制方法及装置,以部分的解决现有技术存在的上述问题。
2、本说明书采用下述技术方案:
3、本说明书提供了一种无人设备控制方法,包括:
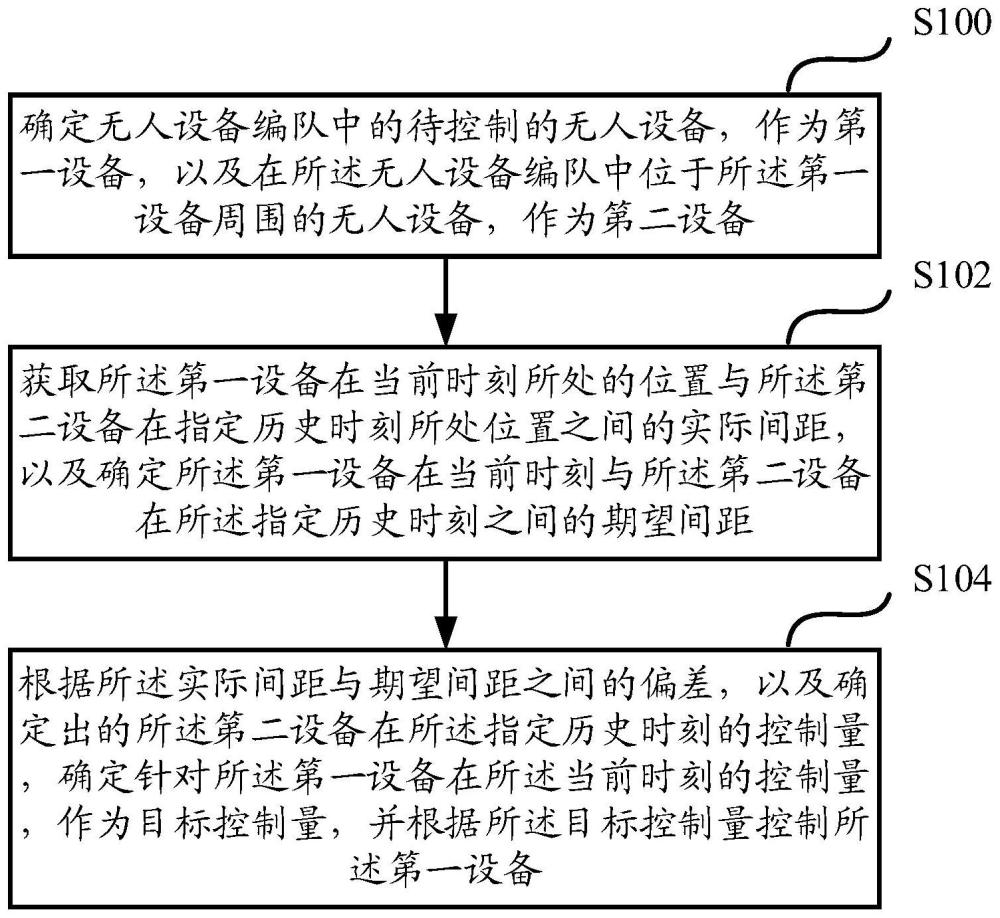
4、确定无人设备编队中的待控制的无人设备,作为第一设备,以及在所述无人设备编队中位于所述第一设备周围的无人设备,作为第二设备;
5、获取所述第一设备在当前时刻所处的位置与所述第二设备在所述指定历史时刻所处位置之间的实际间距,以及确定所述第一设备在当前时刻与所述第二设备在所述指定历史时刻之间的期望间距;
6、根据所述实际间距与所述期望间距之间的偏差,以及确定出的所述第二设备在所述指定历史时刻的控制量,确定针对所述第一设备在所述当前时刻的控制量,作为目标控制量,并根据所述目标控制量控制所述第一设备。
7、可选地,获取所述第一设备在当前时刻所处的位置与所述第二设备在指定历史时刻所处位置之间的实际间距,具体包括:
8、根据获取到的所述第一设备的行驶数据以及所述第二设备的行驶数据,确定所述第一设备在当前时刻所处的位置与所述第二设备在指定历史时刻所处位置之间的实际间距。
9、可选地,行驶数据包括:状态数据和控制数据;所述状态数据包括:所述无人设备编队中各无人设备之间的间距、无人设备的位置数据、无人设备的速度、无人设备的加速度;所述控制数据包括:无人设备控制自身行驶的控制量;
10、获取所述第一设备与第二设备的行驶数据,具体包括:
11、通过搭载在所述第一设备上的传感器,采集所述第一设备与第二设备在行驶过程中的状态数据并存储;
12、通过搭载在所述第一设备上的通信模块,获取所述第二设备发送的用于控制所述第二设备自身的控制数据。
13、可选地,所述指定历史时刻距离所述当前时刻的时长,不小于所述第二设备通过所述通信模块发送控制数据的通信延时和所述第一设备通过所述传感器采集数据时的感知延时中的最大值。
14、可选地,获取所述第一设备在当前时刻所处的位置与所述第二设备在所述指定历史时刻所处位置之间的实际间距,具体包括:
15、根据所述第一设备在当前时刻所处的位置、所述第二设备在所述指定历史时刻所处位置和预设的设备长度,确定所述第一设备是设备前端在当前时刻所处的位置与所述第二设备的尾端在所述指定历史时刻所处位置之间的实际间距。
16、可选地,确定所述第一设备在当前时刻与所述第二设备在所述指定历史时刻之间的期望间距,具体包括:
17、根据所述第一设备按照在所述当前时刻感知的速度在预设的缓冲时间内所行使的距离,以及预设的无人设备间的最小间距,确定所述第一设备在当前时刻与所述第二设备在所述指定历史时刻之间的基础间距;
18、根据所述第二设备按照在所述指定历史时刻感知的速度从所述指定历史时间到所述当前时间所行驶的距离,确定修正距离;
19、根据所述基础间距和所述修正距离,确定所述期望间距。
20、可选地,根据所述实际间距与所述期望间距之间的偏差,以及确定出的所述第二设备在所述指定历史时刻的控制量,确定针对所述第一设备在所述当前时刻的控制量,具体包括:
21、根据所述偏差以及确定出的所述第二设备在所述指定历史时刻的控制量,确定中间控制量;
22、根据所述中间控制量以及预设的缓冲时长,确定所述目标控制量。
23、可选地,确定所述第二设备在所述指定历史时刻的控制量,具体包括:
24、确定所述第一设备在所述指定历史时刻时的控制量,获取所述第一设备对应的第一比例控制参数和第一微分控制参数,以及获取所述第二设备对应的第二比例控制参数以及第二微分控制参数;
25、确定所述第一比例控制参数对所述第一设备在所述指定历史时刻时的控制量加权以及所述第一微分控制参数对所述第一设备在所述指定历史时刻时的设定阶数控制量加权得到的加权和值,作为第一和值,以及确定所述第二比例控制参数对所述第二设备在所述指定历史时刻时的控制量加权以及所述第二微分控制参数对所述第二设备在所述指定历史时刻时的设定阶数控制量加权得到的加权和值,作为第二和值;
26、以所述第一和值与所述第二和值相匹配为约束条件,确定所述第二设备在所述指定历史时刻的控制量。
27、可选地,在确定出所述目标控制量后,将存储的所述第二设备在所述指定历史时刻之前的行驶数据删除。
28、本说明书提供了一种无人设备控制装置,包括:
29、设备确定模块,用于确定无人设备编队中的待控制的无人设备,作为第一设备,以及在所述无人设备编队中位于所述第一设备周围的无人设备,作为第二设备;
30、获取模块,用于获取所述第一设备在当前时刻所处的位置与所述第二设备在指定历史时刻所处位置之间的实际间距,以及确定所述第一设备在当前时刻与所述第二设备在所述指定历史时刻之间的期望间距;
31、控制模块,用于根据所述实际间距与所述期望间距之间的偏差,以及确定出的所述第二设备在所述指定历史时刻的控制量,确定针对所述第一设备在所述当前时刻的控制量,作为目标控制量,并根据所述目标控制量控制所述第一设备。
32、本说明书提供了一种计算机可读存储介质,所述存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述无人设备控制方法。
33、本说明书提供了一种无人驾驶设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现上述无人设备控制方法。
34、本说明书采用的上述至少一个技术方案能够达到以下有益效果:
35、在本说明书提供的无人设备控制方法中,对于无人设备编队中的待控制的第一设备,可以获取第一设备当前时刻所处位置以及在该无人设备编队中位于第一设备周围的第二设备在指定历史时刻所处位置之间的实际间距,以及确定第一设备在当前时刻与第二设备在指定历史时刻之间的期望间距。根据预测出的实际间距与期望间距之间的偏差,以及第二设备在指定历史时刻的控制量,确定针对第一设备在当前时刻的控制量,并以此控制第一设备。
36、从上述方法中可以看出,本方法通过第一设备与第二设备的行驶数据,来预测第一设备与第二设备的实际间距。再通过第一设备与第二设备之间的实际间距与期望间距之间的偏差,与第二设备在指定历史时刻的控制量,最终确定出第一设备的目标控制量,并以此控制第一设备。因为无论在当前时刻还是指定历史时刻,确定出的行驶数据和状态数据都是受到感知延迟和通信延迟影响的,所以,本技术所提供的方法实际上是通过确定上述实际间距和期望间距之间的偏差,将感知延迟以及通信延迟所带来了影响抵消掉,从而提高了确定目标控制量的准确性,在保证安全的情况下,提高了道路的通行效率。
- 还没有人留言评论。精彩留言会获得点赞!