一种基于群智激发联盟博弈的无人机集群任务分配方法
本发明涉及一种基于群智激发联盟博弈的无人机集群任务分配方法,属于无人机自主控制领域。
背景技术:
1、无人机集群是由多架无人机组成的复杂系统,随着无人机自主能力和人工智能水平的不断提升,集群协同控制方法已成为未来无人机领域的重要研究方向。与单无人机执行任务相比,无人机集群具有更高的任务执行效率和更广泛的任务覆盖范围,并且能够通过设计协同控制方法保证集群系统的鲁棒性和自组织性。高效的分配方法对提高无人机协同执行任务能力起到重要作用,通过对无人机所执行的任务进行合理分配,能够实现以最小全局代价或最大全局收益完成任务。面对未来无人机多任务、多目标的复杂应用需求,开展基于群体智能的无人机集群协同控制成为未来研究的主要方向。
2、无人机任务分配问题作为无人机集群协同控制的关键问题,其核心在于针对目标分配的研究。目前,传统的任务分配方法包括数学规划方法、拍卖算法、强化学习方法、仿生智能算法等等。然而,传统的规划方法主要针对单无人机的目标分配问题,而非多无人机协同控制。拍卖算法能够较好地解决多无人机、多目标的分配问题,但难以实现个体之间的信息交互、协调调度,无法在复杂场景中进一步应用。通过强化学习方法能够得到任务分配问题的最优解,这种方法在动态复杂的场景下具有较高的应用价值,但需要相应的训练集对模型进行训练,使得这一过程实现难度大、收敛时间长,不符合快速性、实时性的任务需求。仿生智能算法包括狼群算法、蜂群算法等,通过模仿典型生物群体运动和决策的内在机理,解决无人机集群协同控制中的关键问题,但需要结合群体智能方法进一步深入研究。将无人机作为智能个体,考虑无人机集群的群智激发属性,一种行之有效的方法是将博弈论应用于无人机任务分配问题。通过建立针对任务分配问题的博弈模型,使得个体利益与全局利益达到一致,无人机作为智能个体不需要复杂的决策系统,而是侧重于群体智能特性的研究。
3、作为一种解决群体智能领域中个体行为与群体利益冲突的常用方法,博弈论被越来越广泛应用在无人机集群协同控制中。通过激发合作行为的产生,体现了群体智能的属性。作为合作博弈中的典型模型,联盟博弈通过形成由若干参与者组成的联盟,根据个体的属性、偏好对群体进行划分,从而实现个体以及群体利益的最大化,将任务分配问题转化为求解联盟的最优结构问题。针对无人机任务分配的实际需求,无人机根据位置、速度、资源等因素形成联盟,每个联盟完成对应目标的任务。因此,本发明从时间代价、资源消耗、个体声誉、个体策略更新规则等方面出发,建立了联盟博弈模型,并在此基础上提出了一种基于群智激发联盟博弈的无人机集群任务分配方法,用于解决无人机集群任务分配问题。
技术实现思路
1、本发明提出了一种基于群体智能联盟博弈的无人机任务分配方法,建立了联盟博弈模型与无人机动力模型的关系,设计了时间代价、资源消耗、个体声誉等函数,将任务分配问题转化为最优联盟结构问题,使无人机联盟与集群任务一一对应。最后,通过优化算法对个体更新策略进行优化,从而获得群体任务分配的最优解,解决无人机集群任务分配中的结构单一、适应能力差等问题。
2、为实现上述目的,本发明一种基于群体智能联盟博弈的无人机任务分配方法的主要步骤如下:
3、步骤一:无人机动力学建模
4、如图1所示,在惯性坐标系xgygzg下,建立无人机动力学模型。假设无人机已经装有关于速度、航向和高度控制的自动驾驶仪,对无人机3自由度非线性运动模型进行简化,得到以为控制输入变量,
5、以[xi,yi,hi,vi,ψi,λi]为状态变量的简化的无人机非线性模型,如下:
6、
7、其中,n表示无人机的数量,i=1,2,...,n。无人机水平位置和高度分别用(xi,yi)和hi来表示。vi表示无人机水平速度,ψi和λi分别表示无人机的航向角和高度变化率。分别表示无人机自驾仪的控制输入,τv,τψ,和(τλ,τh)分别表示无人机自驾仪的控制参数。此外,无人机还受到推力ti、阻力di、升力li和重力mig的作用。
8、考虑到无人机的运动特性,对其速度、航向角和高度变化率进行相应的约束,如下:
9、
10、其中,vmin,vmax分别表示无人机速度的最小值和最大值,nmax表示无人机的法向过载,λmin,λmax分别表示无人机高度变化率的最小值和最大值。
11、步骤二:联盟博弈模型建模
12、将任务分配问题转化为联盟博弈中的联盟分组问题,其中无人机集合为m={m1,m2,…,mnm},目标集合为t={t1,t2,…,tnt},无人机具有不同的初始速度、位置、以及携带资源。联盟划分与目标集合一一对应,定义为s={s1,s2,…,snt},每一架无人机同一时刻只分配到一个任务,即
13、
14、无人机i选择从集合中选择ai作为自身所选择的目标,用向量组a=(a1,a2,…,anm)表示任务分配的一组结果。用表示分配解a下选择目标j的一组无人机集合
15、
16、进一步用k(i)表示无人机i的分配目标,sk(i)表示无人机i所属的联盟
17、sk(i)={sj∈k|mi∈sj} (5)
18、全局收益定义为所有任务被完成时的总收益,任务分配的最终目的在于最大化全局收益
19、
20、其中表示分配解a下目标j的支付函数。将其定义为任务收益减去任务代价。当任务未能被分配时,支付函数为忽略该目标的惩罚
21、
22、其中,rj表示完成任务j收益,同时也是忽视该目标的惩罚,cij表示无人机i完成目标j的代价函数,包括时间代价和资源消耗两方面。
23、步骤三:无人机代价函数设计
24、在联盟博弈模型中,组成联盟主要考虑了无人机的初始位置、速度、以携带资源以及个体声誉。这种组合优化问题的目标在于及时、高效地完成任务。这一目标要求,联盟成员所具有的资源能够保证完成对应任务,而任务完成的时间取决于所有无人机抵达目标的时间,距离较近的无人机需要等待距离较远的无人机。因此无人机的代价函数由两方面内容组成,即时间代价和资源消耗
25、
26、其中dij表示无人机i与目标j之间的距离,ω1,ω2,εt,εe分别表示权重系数。
27、从而得到无人机的个体收益函数
28、
29、其中|sj|表示联盟sj中的无人机数量。随着同一联盟内部无人机数量的增加,无人机碰撞概率以及通信负载也显著增加,因此一味地增加联盟规模可能会损害无人机个体的收益,需要合理控制联盟规模。
30、当个体收益函数达到最优解时,所有个体均实现了最优分配,给定该分配组合中其他个体的分配结果不变,任何个体都没有激励单方面改变自己的目标,即达到纳什均衡
31、
32、步骤四:无人机个体声誉函数设计
33、为了调控无人机的合作行为,根据无人机在任务中贡献的资源量,为每个无人机定义了累积合作信用。假设所有无人机都具有相等的初始信用
34、
35、每一时刻,对无人机的累积声誉进行更新
36、
37、其中声誉变化量定义为
38、
39、其中rj表示任务j的收益,ai表示无人机的相对资源贡献量
40、
41、对无人机的累计信誉进行归一化处理
42、
43、其中分别为当前时刻个体声誉的最大和最小值。每一时刻个体声誉的范围为[0,1],个体当前时刻声誉将对未来组成联盟产生影响,当声誉低于某一阈值ηc时,无人机被视为低价值的合作对象,将难以参与到联盟组成中。
44、步骤五:个体策略更新规则设计
45、在联盟博弈模型中,个体的策略即为选择的目标。传统的策略更新规则包括无条件模仿规则、费米规则、成对比较规则等等,这些策略更新规则较为简便,但主要依赖于邻居信息或全局信息的获取,无法体现群体智能的特性。空间博弈自适应学习(sap)算法,具有每次迭代过程随机等概率地选择更新目标个体的特点,被选中的无人机mi根据下式计算其任务选择概率
46、
47、其中σ(·)为logit概率函数
48、
49、但是,分布式环境下个体的随机选择较为困难,因此引入了周期性自适应选择机制。每架无人机在一个周期内按编号顺序进行策略更新。虽然放弃了一定的随机性,但仍满足sap算法的要求。
50、同时,为了加快算法的收敛速度,在个体更新任务时增加了基于邻居信息和历史信息的参考。如果更新后的个体收益低于邻居最优解或历史最优解,无人机将放弃任务更新,并随机选择新的任务更新
51、
52、其中表示无人机邻居最高收益或历史最高收益。
53、步骤六:无人机集群任务分配模型及输出
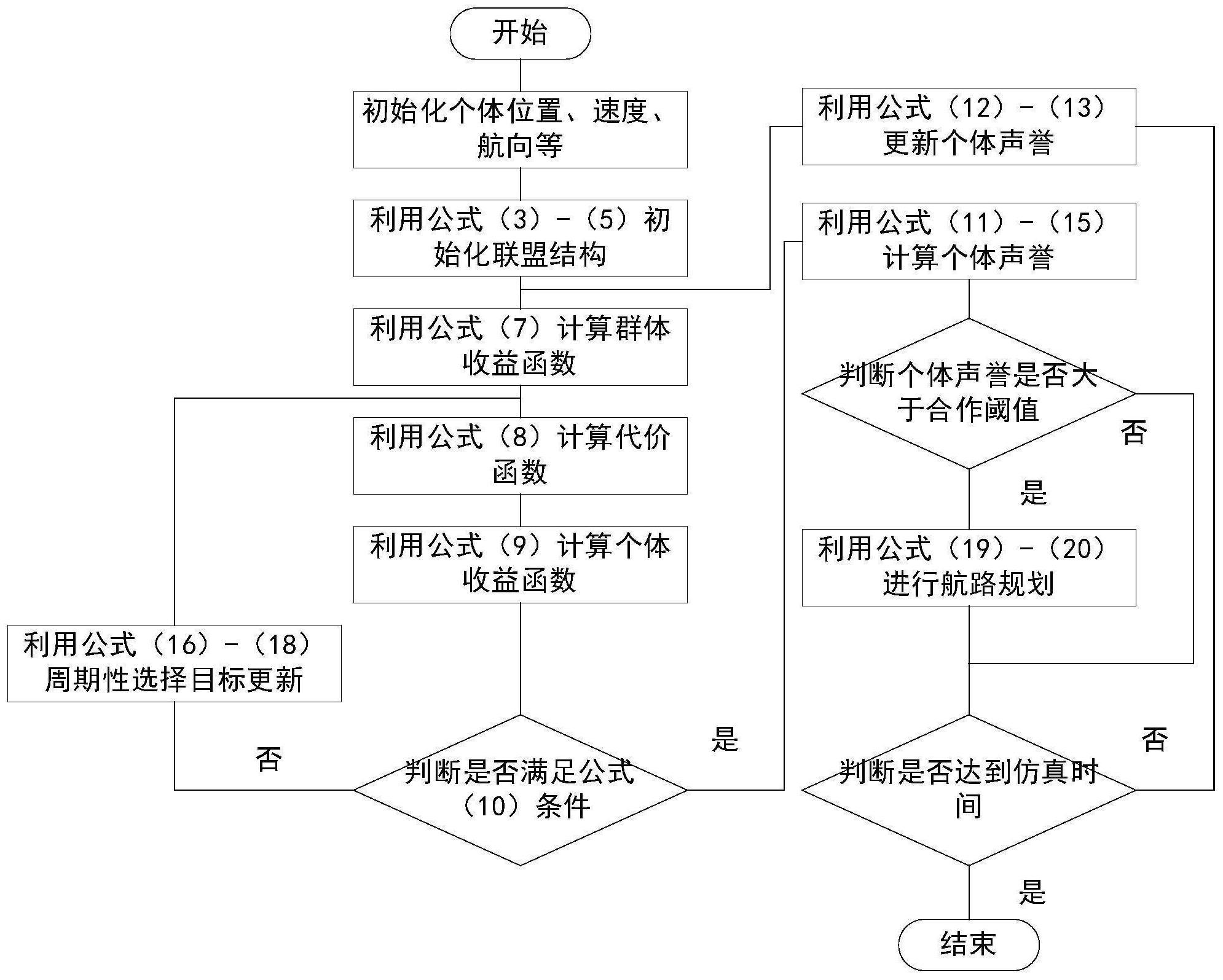
54、如图3所示,基于群智激发联盟博弈的无人机集群任务分配流程包括如下步骤。首先,无人机对目标进行初始化分配,根据不同的任务目标组建联盟,最先分配到该目标的个体作为领导者;然后,根据无人机代价函数与任务价值构建群体收益函数与个体收益函数;然后,根据个体声誉对联盟成员进行筛选,剔除联盟中声誉较低的个体;然后,采用改进sap算法更新联盟中个体的目标分配结果,直到达到最优分配解。得到目标分配结果后,需要对无人机航路进行规划,从而完成任务分配过程。最终,输出结果为任务分配结果与航路规划结果。
55、采用比例导引法作为航路规划的控制律,如图2所示,相对运动方程
56、
57、其中r代表了无人机和目标的相对距离,无人机和目标的连线称为目标视线;q代表了目标视线与攻击平面内某一基准线的夹角,称为目标视线方位角;v代表无人机运动速度;σ代表速度和基准线的夹角;η代表速度和目标视线的夹角,即无人机前置角。
58、在航路规划中主要考虑时间一致性的约束,即协同航行时间大于同一联盟内部的所有无人机的期望到达时间,以保证所有无人机在相同时间内到达目标
59、
60、本发明一种基于群智激发联盟博弈的无人机集群任务分配方法,针对无人机任务分配问题中分布式协调控制的要求,提出了一种基于改进势对策的任务分配方法。首先,将任务分配问题描述为联合编队博弈模型,设计了无人机的个体和全局收益函数;其次,利用改进的sap算法对博弈模型进行优化求解。仿真结果表明,该方法在有限时间内具有较好的分配均衡度和任务受益度优势,验证了该方法的有效性。
- 还没有人留言评论。精彩留言会获得点赞!