飞行器三维避障方法、装置以及飞行器与流程
本申请涉及无人机控制,更具体地,涉及一种飞行器三维避障方法、装置以及飞行器。
背景技术:
1、近年来,随着无人机技术的不断发展和完善,无人机已经由军事领域逐步扩展到民事领域,无人机避障技术开始成为研究热点。在相关方式中,可以基于激光雷达获取到的点云信息得到三维重建地图,并基于三维重建地图进无人机行路径规划,以实现无人机避障。但相关方式中,还存在路径规划不准确的问题。
技术实现思路
1、鉴于上述问题,本申请提出了一种飞行器三维避障方法、装置以及飞行器,以实现改善上述问题。
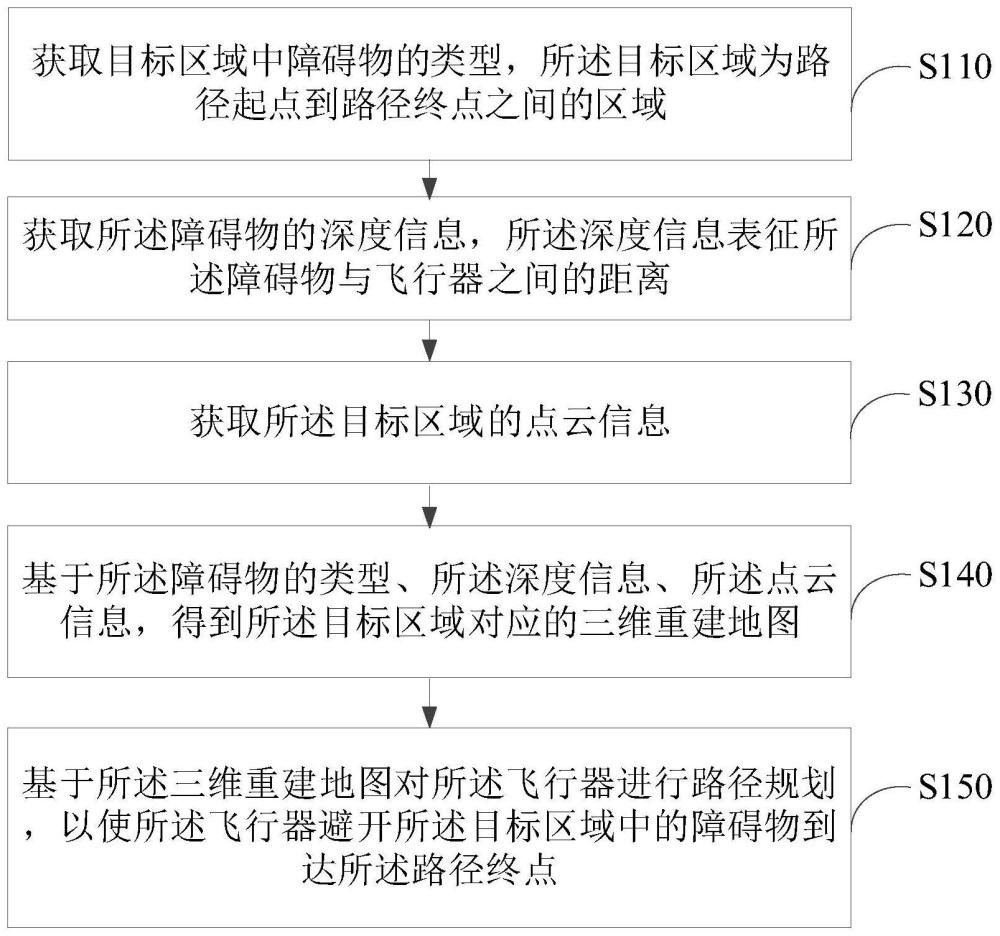
2、第一方面,本申请提供了一种飞行器三维避障方法,所述方法包括:获取目标区域中障碍物的类型,所述目标区域为路径起点到路径终点之间的区域;获取所述障碍物的深度信息,所述深度信息表征所述障碍物与飞行器之间的距离;获取所述目标区域的点云信息;基于所述障碍物的类型、所述深度信息、所述点云信息,得到所述目标区域对应的三维重建地图;基于所述三维重建地图对所述飞行器进行路径规划,以使所述飞行器避开所述目标区域中的障碍物到达所述路径终点。
3、第二方面,本申请提供了一种飞行器三维避障装置,所述装置包括:障碍物的类型获取单元,用于获取目标区域中障碍物的类型,所述目标区域为路径起点到路径终点之间的区域;深度信息获取单元,用于获取所述障碍物的深度信息,所述深度信息表征所述障碍物与飞行器之间的距离;点云信息获取单元,用于获取所述目标区域的点云信息;三维地图重建单元,用于基于所述障碍物的类型、所述深度信息、所述点云信息,得到所述目标区域对应的三维重建地图;路径规划单元,用于基于所述三维重建地图对所述飞行器进行路径规划,以使所述飞行器避开所述目标区域中的障碍物顺利到达所述路径终点。
4、第三方面,本申请提供了一种飞行器,包括处理器以及存储器;一个或多个程序被存储在所述存储器中并被配置为由所述处理器执行,所述一个或多个程序配置用于执行上述的方法。
5、本申请提供的一种飞行器三维避障方法、装置以及飞行器,在获取表征路径起点到路径终点之间的区域的目标区域中障碍物的类型后,获取所述障碍物的表征所述障碍物与飞行器之间的距离的深度信息,基于所述障碍物的类型、所述深度信息、所述点云信息,得到所述目标区域对应的三维重建地图,基于所述三维重建地图对所述飞行器进行路径规划,以使所述飞行器避开所述目标区域中的障碍物到达所述路径终点。通过上述方式使得,可以基于目标区域中障碍物的类型、障碍物的深度信息以及目标区域的点云信息得到目标区域对应的三维重建地图,从而提高了三维重建地图的准确性,进而在基于该三维地图对飞行器进行路径规划时,可以得到更加准确的路径以使飞行器可以避开目标区域中的障碍物顺利到达所述路径终点。
技术特征:
1.一种飞行器三维避障方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述获取目标区域中障碍物的类型包括:
3.根据权利要求2所述的方法,其特征在于,所述主干网络包括第一特征提取网络、第二特征提取网络和特征融合网络,所述将所述待识别图像输入所述主干网络,得到所述待识别图像的特征包括:
4.根据权利要求1所述的方法,其特征在于,所述获取所述障碍物的深度信息包括:
5.根据权利要求4所述的方法,其特征在于,将所述每帧双目图像对应的左视图图像和右视图图像以及所述每帧参考双目深度图像对应的参考左视图深度图像和参考右视图深度图像分别输入所述深度回归网络,得到多帧左视图视差图像和多帧右视图视差图像包括:
6.根据权利要求4所述的方法,其特征在于,所述多模态融合网络包括第一三维卷积网络、第二三维卷积网络和第三三维卷积网络,所述将所述多帧左视图视差图像、多帧右视图视差图像、多帧雷达图像和多帧单目图像分别输入所述多模态融合网络,得到所述障碍物的多帧参考深度图像包括:
7.根据权利要求1所述的方法,其特征在于,所述基于所述障碍物的类型、所述深度信息、所述点云信息,得到所述目标区域对应的三维重建地图包括:
8.根据权利要求1所述的方法,其特征在于,所述基于所述三维重建地图对所述飞行器进行路径规划,以使所述飞行器避开所述目标区域中的障碍物到达所述路径终点包括:
9.一种飞行器三维避障装置,其特征在于,所述装置包括:
10.一种飞行器,其特征在于,包括处理器以及存储器;
技术总结
本申请实施例公开了一种飞行器三维避障方法、装置以及飞行器。所述方法包括:获取目标区域中障碍物的类型;获取障碍物的深度信息;获取所述目标区域的点云信息;基于障碍物的类型、深度信息、点云信息,得到目标区域对应的三维重建地图;基于三维重建地图对飞行器进行路径规划,以使飞行器避开目标区域中的障碍物到达路径终点。通过上述方式使得,可以基于目标区域中障碍物的类型、障碍物的深度信息以及目标区域的点云信息得到目标区域对应的三维重建地图,从而提高了三维重建地图的准确性,进而在基于该三维地图对飞行器进行路径规划时,可以得到更加准确的路径以使飞行器可以避开目标区域中的障碍物顺利到达所述路径终点。
技术研发人员:李景俊,何宇,闫春香,曹驰
受保护的技术使用者:广州汽车集团股份有限公司
技术研发日:
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!