一种四旋翼无人机有限时间姿态跟踪控制系统
1.本发明属于无人机控制领域,特别是涉及一种四旋翼无人机有限时间姿态跟踪控制系统。
背景技术:
2.近年来,在无人机应用与实验领域,四旋翼无人机被认为是最好的平台。四旋翼飞行器实验平台采用arm处理器控制无刷直流电机并且通过加速度传感器和陀螺仪的反馈数据进行飞行器的平衡控制和姿态调节。
3.随着军用和民用市场的广阔应用需求以及四旋翼本身独特的性能,四旋翼飞行器已经成为航空学术研究中的热点问题,小型四旋翼飞行器具有4个螺旋桨,并且螺旋桨成十字交叉结构的旋翼式飞行模式,由4个独立的电机分别驱动,4个旋翼蝶型分布,分别以顺时针和逆时针两个方向旋转,对角线上的电机转动方向相同,相邻电机转动方向相反,通过调节4个电机的转速可实现俯仰,横滚,偏航等飞行动作,并有可悬停,机动性,方向控制灵活等优点。
4.但在现有技术对于四旋翼无人机飞行过程中的姿态控制以及路径规划尚未成熟,由此导致在飞行时出现较多问题。
技术实现要素:
5.本发明的目的是提供一种四旋翼无人机有限时间姿态跟踪控制系统,以解决上述现有技术存在的问题。
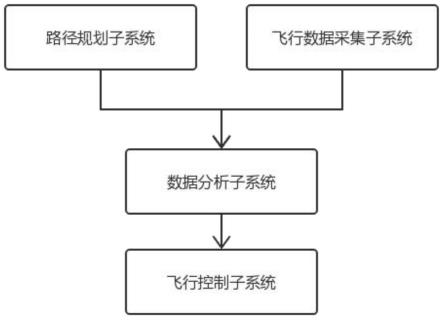
6.为实现上述目的,本发明提供了一种四旋翼无人机有限时间姿态跟踪控制系统,包括路径规划子系统、飞行数据采集子系统、数据分析子系统、飞行控制子系统;
7.所述路径规划子系统用于对四旋翼无人机飞行起始点之间的路径进行规划;
8.所述飞行数据采集子系统用于采集四旋翼无人机的飞行数据;
9.所述数据分析子系统用于对所述飞行数据进行分析,生成控制指令传输至所述飞行控制子系统;
10.所述飞行控制子系统用于根据所述控制指令调整四旋翼无人机的飞行状态。
11.可选地,所述路径规划子系统通过获取所述四旋翼无人机的飞行起始点之间的建筑三维点云图,根据所述建筑三维点云图获取无人机飞行路径。
12.可选地,所述路径规划子系统根据所述建筑三维点云图确定所述飞行起始点之间的最短路径,并获取所述最短路径中的障碍物。
13.可选地,所述路径规划子系统根据所述建筑三维点云图获取所述最短路径以及障碍物后,将所述建筑三维点云图传输至所述数据分析子系统进行避障设置。
14.可选地,所述飞行数据采集子系统包括设置于四旋翼无人机上的微型转速传感器、微型惯性传感器、压电式加速度传感器、气压高度传感器以及陀螺仪;所述飞行数据包括电机转速、最大飞行速度、最大加速度、最大角速度、最大飞行高度。
15.可选地,所述数据分析子系统根据所述路径规划子系统获取的障碍物确定四旋翼无人机的变换姿态,根据所述变换姿态生成相对应的控制指令进行避障设置。
16.可选地,所述变换姿态包括垂直升降、俯仰姿态、倾斜姿态、偏航运动姿态。
17.可选地,所述数据分析子系统还用于对四旋翼无人机的飞行数据设置阈值,当所述飞行数据超出设置的阈值时,则生成飞行调整指令,使无人机变换姿态,还用于采用pid算法对四旋翼无人机进行飞行控制。
18.可选地,当接收垂直升降的控制指令时,所述飞行控制子系统增加/减少对四旋翼无人机的旋翼电机的输出功率;当接收俯仰姿态的控制指令时,控制四个旋翼中斜对应的两个旋翼电机,使其中一个旋翼电机的输出功率增加,另一个旋翼电机的输出功率减少,其余两个旋翼的电机输出功率不变;当接收倾斜姿态的控制指令时,同时增加相邻两旋翼的电机输出功率,其余两旋翼的电机输出功率不变;当接收偏航运动姿态的控制指令时,控制四个旋翼中的两个旋翼正向转动,其余两个旋翼反向转动,且对角线相对的旋翼转动方向相同。
19.本发明的技术效果为:
20.本发明提出了一种四旋翼无人机有限时间姿态跟踪控制系统,通过三维激光点云技术实现四旋翼无人机飞行前的路径规划以及障碍物识别,并确定无人机飞行至障碍物处的姿态变换,缩小飞行路径,同时根据实际需要设置飞行过程中速度、高度的阈值,实现了飞行过程的跟踪控制。
附图说明
21.构成本技术的一部分的附图用来提供对本技术的进一步理解,本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的不当限定。在附图中:
22.图1为本发明实施例中的跟踪控制系统结构示意图。
具体实施方式
23.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本技术。
24.需要说明的是,在附图的流程图示出的步骤可以在诸如一组计算机可执行指令的计算机系统中执行,并且,虽然在流程图中示出了逻辑顺序,但是在某些情况下,可以以不同于此处的顺序执行所示出或描述的步骤。
25.实施例一
26.如图1所示,本实施例中提供一种四旋翼无人机有限时间姿态跟踪控制系统,包括路径规划子系统、飞行数据采集子系统、数据分析子系统、飞行控制子系统,具体地:
27.点云是指获取物体表面每个采样点的空间坐标形成的点的集合。用于三维目标检测的点云通常由激光雷达扫描得来,包含点的三维坐标、强度等信息,基于点云的三维检测方法的精度高于基于图像的三维检测方法,因此本实施例中的路径规划子系统采用三维点云检测技术,获取所述四旋翼无人机的飞行起始点之间的建筑三维点云图,建筑三维点云图中包含了无人机起始点之间的飞行路径以及障碍物,例如城市建筑、基础设施等,因此可根据所述建筑三维点云图获取四旋翼无人机飞行起始点之间的最短路径以及最短路径之
间的障碍物,获取最短路径以及障碍物之后,将建筑三维点云图传输至数据分析子系统进行避障设置。
28.飞行数据采集子系统用于获取四旋翼无人机飞行状态下的飞行数据,包括设置于四旋翼无人机上的微型转速传感器、微型惯性传感器、压电式加速度传感器、气压高度传感器以及陀螺仪,惯性传感器是检测和测量加速度、倾斜、冲击、振动、旋转和多自由度运动的传感器,惯性传感器是解决导航、定向和运动载体控制的重要部件,同时考虑四旋翼无人机质量体积较小,本实施例采用微型惯性传感器实现无人机最大飞行角速度的获取,气压高度传感器是通过气压的变化来测量高度的传感器,因此在测量的过程中不受障碍物的影响,测量高度范围广,方便移动,可进行绝对海拔高度测量和相对高度测量;压电式加速度传感器又称压电加速度计。通过利用物质的压电效应,在加速度计受振时,质量块加在压电元件上的力也随之变化。当被测振动频率远低于加速度计的固有频率时,则力的变化与被测加速度成正比,可适用于无人机体积较小、有效载荷较小、对传感器精度要求不高的特点。综上,本实施例中的飞行数据采集子系统所采集的无人机飞行数据包括电机转速、最大飞行速度、最大加速度、最大角速度、最大飞行高度,获取完毕后,飞行数据采集子系统将飞行数据传输至数据分析子系统进行飞行过程中的控制。
29.四旋翼无人机飞行过程中的飞行姿态包括垂直升降、俯仰姿态、倾斜姿态、偏航运动姿态。当无进行垂直升降飞行时,四旋翼无人机飞行的水平高度发生变化;当处于俯仰姿态时,无人机向前或向后倾斜飞行;当处于倾斜飞行姿态时,无人机向侧方倾斜飞行;当处于偏航运动姿态时,无人机以机身转动的姿态飞行。
30.数据分析子系统的功能还包括:根据实际需要对飞行数据进行阈值设置,当无人机飞行过程中采集的飞行数据超出设置的阈值时,则生成姿态调整指令,控至四旋翼无人机变更飞行姿态,例如:当需要进行低空慢速飞行监测时,可将无人机的最大飞行高度阈值设为500m,将最大飞行速度阈值设为20km/h,当无人机飞行过程中所采集的飞行数据超出上述阈值时,则通过数据分析子系统分别生成垂直下降控制指令以及俯仰姿态控制指令,控制无人机的飞行高度、速度恢复至设定阈值以下。
31.数据分析子系统接收路径规划子系统传输的建筑三维点云图后,可根据获取的障碍物对四旋翼无人机的飞行姿态进行适当调整,并生成相对应的控制指令,例如在无人机飞行的最短路径之间存在高度为400m的建筑物,而本次飞行设置的最大飞行高度为500m,因此只需要在飞行过程中生成垂直上升的飞行控制指令,使四旋翼无人机在飞行至该建筑物时的飞行高度保持至400m-500m即可,无需进行避障设置,可有效缩短飞行距离。
32.本实施例中的飞行控制子系统根据接收到的控制指令执行相对应的控制操作:当接收垂直升降的控制指令时,所述飞行控制子系统增加/减少对四旋翼无人机的旋翼电机的输出功率,并且四个旋翼电机增加/减少的输出功率相同;当接收俯仰姿态的控制指令时,控制四个旋翼中斜对应的两个旋翼电机,在斜对应的两个旋翼中,使其中一个旋翼电机的输出功率增加,另一个旋翼电机的输出功率减少,其余两个旋翼的电机输出功率不变;当接收倾斜姿态的控制指令时,同时增加相邻两旋翼的电机输出功率(输出功率的增加量保持相同),其余两旋翼的电机输出功率不变,使无人机向该相邻旋翼相对的方向倾斜;当接收偏航运动姿态的控制指令时,控制四个旋翼中的两个旋翼正向转动,其余两个旋翼反向转动,且对角线相对的旋翼转动方向相同,则可实现无人机的偏航运动。
33.此外,本发明的数据分析子系统还可采用pid算法对四旋翼无人机进行飞行控制,将飞行数据中的角速度值作为误差计算,由于四旋翼无人机为欠驱动系统,在只将四个旋翼的转速作为输入量的前提下需要进行较多状态量的控制,因此为了实现四旋翼无人机的飞行控制,本实施例在无人机的起飞阶段不使用pid积分算法,使飞行器迅速达到平衡,当飞行器的角度值与给定的角度值的误差较小时引入积分部分并且减小比例值,从而能够既快速又准确地控制飞行器的平衡。
34.本实施例提出了一种四旋翼无人机有限时间姿态跟踪控制系统,通过三维激光点云技术实现四旋翼无人机飞行前的路径规划以及障碍物识别,并确定无人机飞行至障碍物处的姿态变换,同时根据实际需要设置飞行过程中速度、高度的阈值,实现了飞行过程的跟踪控制。
35.以上所述,仅为本技术较佳的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应该以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1