车辆仿真控制方法、装置、电子设备及存储介质与流程
本技术实施例涉及自动驾驶,涉及但不限于一种车辆仿真控制方法、装置、电子设备及存储介质。
背景技术:
1、自动驾驶车辆是一种通过电脑系统实现无人驾驶的智能汽车,能够给人带来诸如减少交通事故、节省能源、让人拥有更多的自由时间等好处,是未来汽车的发展方向。
2、在自动驾驶车辆的开发过程中,需要采用自动驾驶仿真测试系统对研发的决策算法进行测试验证。而测试验证时,首先需要搭建出仿真的交通环境,在测试车辆的周边设置若干辆背景车辆和仿真交通路网,并设置背景车辆的驾驶行为,进而在仿真运行过程中,背景车辆按照预先定义好的驾驶行为在道路上行驶,其中某些驾驶行为和交通路网的仿真环境会对测试车辆的驾驶决策行为产生影响,以验证测试车辆在交通流中行驶的决策算法。
3、目前的交通仿真中,仿真车辆对交通信号灯的反应比较单一,无法模拟现实世界中车辆面对带倒计时器的各种决断过程,例如,抢绿灯和等红灯时走神造成的等待时间过长等问题,从而造成仿真车辆对信号灯倒计时的反应与现实不符,造成仿真结果失真。
技术实现思路
1、本技术实施例提供一种车辆仿真控制方法、装置、电子设备及存储介质,至少能够应用于自动驾驶领域、交通仿真领域和车载场景,能够在进行交通仿真过程中,准确的模拟现实世界中车辆面对具有倒计时器时的各种决断过程,从而提高仿真结果的真实性和准确性。
2、本技术实施例的技术方案是这样实现的:
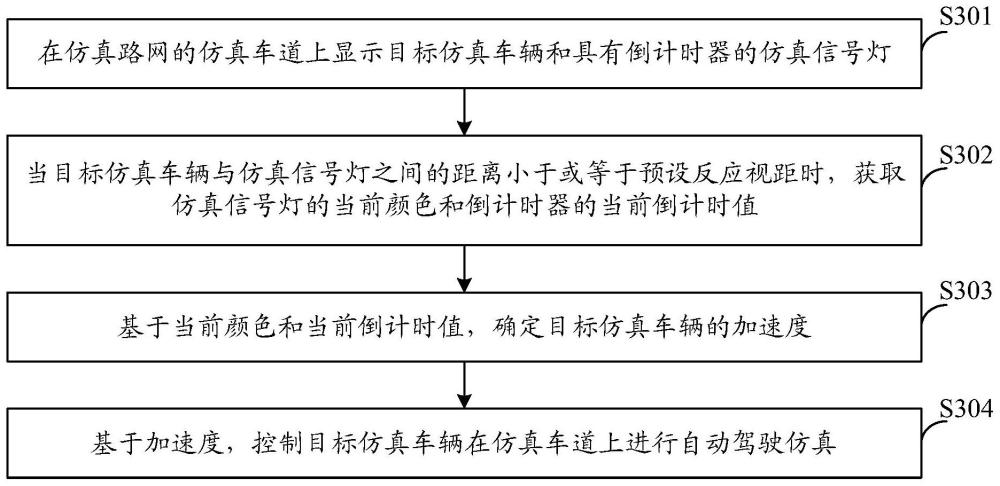
3、本技术实施例提供一种车辆仿真控制方法,所述方法包括:在仿真路网的仿真车道上显示目标仿真车辆和具有倒计时器的仿真信号灯;当所述目标仿真车辆与所述仿真信号灯之间的距离小于或等于预设反应视距时,获取所述仿真信号灯的当前颜色和所述倒计时器的当前倒计时值;基于所述当前颜色和所述当前倒计时值,确定所述目标仿真车辆的加速度;基于所述加速度,控制所述目标仿真车辆在所述仿真车道上进行自动驾驶仿真。
4、本技术实施例提供一种车辆仿真控制装置,所述装置包括:显示模块,用于在仿真路网的仿真车道上显示目标仿真车辆和具有倒计时器的仿真信号灯;获取模块,用于当所述目标仿真车辆与所述仿真信号灯之间的距离小于或等于预设反应视距时,获取所述仿真信号灯的当前颜色和所述倒计时器的当前倒计时值;确定模块,用于基于所述当前颜色和所述当前倒计时值,确定所述目标仿真车辆的加速度;仿真控制模块,用于基于所述加速度,控制所述目标仿真车辆在所述仿真车道上进行自动驾驶仿真。
5、在一些实施例中,所述装置还包括:反应视距获取模块,用于获取与所述目标仿真车辆对应的预设反应视距;所述预设反应视距包括信号灯反应视距和倒计时反应视距;所述信号灯反应视距大于或等于所述倒计时反应视距;检测模块,用于当检测到所述目标仿真车辆与所述仿真信号灯之间的距离小于或等于所述信号灯反应视距时,连续地检测所述目标仿真车辆与所述仿真信号灯之间的距离;条件确定模块,用于当检测到所述目标仿真车辆与所述仿真信号灯之间的距离小于或等于所述倒计时反应视距时,确定出所述目标仿真车辆与所述仿真信号灯之间的距离小于或等于预设反应视距。
6、在一些实施例中,所述反应视距获取模块还用于:获取所述目标仿真车辆的车辆属性参数、与所述目标仿真车辆对应的仿真驾驶员的驾驶员属性参数和所述仿真路网的环境参数;基于所述车辆属性参数、所述驾驶员属性参数和所述环境参数,确定所述目标仿真车辆的敏锐程度系数;获取所述仿真车道对应的道路固有参数;基于所述道路固有参数和所述敏锐程度系数,确定所述预设反应视距。
7、在一些实施例中,所述确定模块还用于:确定所述目标仿真车辆对应的第一行驶用时,所述第一行驶用时是所述目标仿真车辆以当前速度从当前位置行驶至所述仿真车道的停止线位置的时长;当所述当前颜色为红色、且所述当前倒计时值为第一倒计时值时,如果所述第一行驶用时大于所述第一倒计时值,确定所述第一行驶用时与所述第一倒计时值之间的第一差值;当所述第一差值大于预设的红灯提前余量阈值时,按照第一激进概率选择出所述目标仿真车辆的加速度为第一加速度,或者,按照第一保守概率选择出所述目标仿真车辆的加速度为零;其中,所述第一激进概率与所述第一保守概率之和为1,所述第一激进概率与所述目标仿真车辆对应的仿真驾驶员的激进程度参数正相关;所述第一加速度大于零。
8、在一些实施例中,所述第一加速度与所述仿真驾驶员的激进程度参数正相关;所述第一加速度小于或等于所述目标仿真车辆的最大加速度,且所述第一加速度小于所述目标仿真车辆的目标匀加速度,所述目标匀加速度是指所述目标仿真车辆以所述当前速度为初速度、以所述第一倒计时值为行驶时长、从当前位置行驶至所述停止线位置时所采用的匀加速度。
9、在一些实施例中,所述确定模块还用于:当所述第一差值小于或等于所述红灯提前余量阈值时,按照第二激进概率选择出所述目标仿真车辆的加速度为零,或者,按照第二保守概率选择出所述目标仿真车辆的加速度为第二加速度;其中,所述第二激进概率与所述第二保守概率之和为1,所述第二激进概率与所述目标仿真车辆对应的仿真驾驶员的激进程度参数正相关;所述第二加速度小于零。
10、在一些实施例中,所述确定模块还用于:确定所述目标仿真车辆对应的第一行驶用时,所述第一行驶用时是所述目标仿真车辆以当前速度从当前位置行驶至所述仿真车道的停止线位置的时长;当所述当前颜色为红色、且所述当前倒计时值为第一倒计时值时,如果所述第一行驶用时小于或等于所述第一倒计时值,确定所述第一倒计时值与所述第一行驶用时之间的第二差值;当所述第二差值小于或等于预设的红灯滞后余量阈值时,按照第三激进概率选择出所述目标仿真车辆的加速度为第三加速度,或者,按照第三保守概率选择出所述目标仿真车辆的加速度为第四加速度;其中,所述第三激进概率与所述第三保守概率之和为1,所述第三激进概率与所述目标仿真车辆对应的仿真驾驶员的激进程度参数正相关;所述第三加速度和所述第四加速度均小于零;所述第三加速度的绝对值小于所述第四加速度的绝对值;当所述目标仿真车辆以所述第三加速度行驶时,在所述目标仿真车辆到达所述仿真车道的停止线位置时,所述目标仿真车辆的速度大于预设的舒适速度阈值。
11、在一些实施例中,所述第三加速度与所述仿真驾驶员的激进程度参数正相关;所述第三加速度的绝对值小于或等于所述目标仿真车辆的最大减速度的绝对值,且所述第三加速度的绝对值小于或等于所述目标仿真车辆的目标匀减速度的绝对值,所述目标匀减速度是指所述目标仿真车辆以所述当前速度为初速度、以所述第一倒计时值为行驶时长、从当前位置行驶至所述停止线位置时所采用的匀减速度。
12、在一些实施例中,所述确定模块还用于:当所述第二差值大于所述红灯滞后余量阈值时,根据所述当前位置与所述停止线位置之间的距离,确定所述目标仿真车辆的加速度为第一车辆减速度;其中,所述目标仿真车辆按照所述第一车辆减速度行驶时,所述目标仿真车辆在行驶至所述停止线位置时的速度为零。
13、在一些实施例中,所述确定模块还用于:确定所述目标仿真车辆对应的第一行驶用时,所述第一行驶用时是所述目标仿真车辆以当前速度从当前位置行驶至所述仿真车道的停止线位置的时长;当所述当前颜色为绿色、且所述当前倒计时值为第二倒计时值时,如果所述第一行驶用时大于所述第二倒计时值,确定所述第一行驶用时与所述第二倒计时值之间的第三差值;当所述第三差值小于或等于预设的绿灯提前余量阈值时,按照第四激进概率选择出所述目标仿真车辆的加速度为第五加速度,或者,按照第四保守概率选择出所述目标仿真车辆的加速度为第六加速度;其中,所述第四激进概率与所述第四保守概率之和为1,所述第四激进概率与所述目标仿真车辆对应的仿真驾驶员的激进程度参数正相关;所述第五加速度大于零,所述第六加速度小于零;所述第五加速度与所述仿真驾驶员的激进程度参数正相关;所述第五加速度小于或等于所述目标仿真车辆的最大加速度;当所述第三差值大于所述绿灯提前余量阈值时,根据所述当前位置与所述停止线位置之间的距离,确定所述目标仿真车辆的加速度为第二车辆减速度。
14、在一些实施例中,所述确定模块还用于:确定所述目标仿真车辆对应的第一行驶用时,所述第一行驶用时是所述目标仿真车辆以当前速度从当前位置行驶至所述仿真车道的停止线位置的时长;当所述当前颜色为绿色、且所述当前倒计时值为第二倒计时值时,如果所述第一行驶用时小于或等于所述第二倒计时值,确定所述第二倒计时值与所述第一行驶用时之间的第四差值;当所述第四差值小于或等于预设的绿灯滞后余量阈值时,按照第五激进概率选择出所述目标仿真车辆的加速度为第七加速度,或者,按照第五保守概率选择出所述目标仿真车辆的加速度为零;其中,所述第五激进概率与所述第五保守概率之和为1,所述第五激进概率与所述目标仿真车辆对应的仿真驾驶员的激进程度参数正相关;所述第七加速度大于零;所述第七加速度与所述仿真驾驶员的激进程度参数正相关;所述第七加速度小于或等于所述目标仿真车辆的最大加速度;当所述第四差值大于所述绿灯滞后余量阈值时,确定所述目标仿真车辆的加速度为零。
15、在一些实施例中,所述装置还包括:历史颜色获取模块,用于当所述目标仿真车辆停止在所述仿真车道的停止线位置时,获取在所述当前时刻之前一秒时所述仿真信号灯的历史颜色;所述确定模块还用于:如果所述历史颜色为红色,所述当前颜色为绿色,按照第一敏锐概率选择出所述目标仿真车辆对应的仿真驾驶员的启动反应时长;所述启动反应时长与所述仿真驾驶员的敏锐程度参数负相关;所述第一敏锐概率是符合正态分布的函数值;确定所述目标仿真车辆从当前时刻开始,在所述启动反应时长内的加速度为零,且在所述启动反应时长之后的加速度大于零。
16、在一些实施例中,所述装置还包括:跟随车辆确定模块,用于当所述目标仿真车辆与所述仿真信号灯之间具有至少一其他仿真车辆时,将与所述目标仿真车辆位于同一仿真车道、与所述目标仿真车辆相邻且位于所述目标仿真车辆之前的其他仿真车辆,确定为跟随车辆;行驶参数确定模块,用于确定所述跟随车辆的行驶速度和行驶加速度;跟随加速度确定模块,用于基于所述行驶速度和所述行驶加速度,确定所述目标仿真车辆的跟随加速度;所述仿真控制模块,还用于基于所述跟随加速度,控制所述目标仿真车辆在所述仿真车道上进行自动驾驶仿真。
17、本技术实施例提供一种电子设备,包括:存储器,用于存储可执行指令;处理器,用于执行所述存储器中存储的可执行指令时,实现上述车辆仿真控制方法。
18、本技术实施例提供一种计算机程序产品,该计算机程序产品包括计算机程序或可执行指令,计算机程序或可执行指令存储在计算机可读存储介质中;其中,电子设备的处理器从计算机可读存储介质中读取可执行指令,并执行可执行指令时,实现上述的车辆仿真控制方法。
19、本技术实施例提供一种计算机可读存储介质,存储有可执行指令,用于引起处理器执行所述可执行指令时,实现上述车辆仿真控制方法。
20、本技术实施例具有以下有益效果:在仿真路网的仿真车道上显示目标仿真车辆和具有倒计时器的仿真信号灯;对当前时刻的仿真条件进行判断,如果目标仿真车辆与仿真信号灯之间的距离小于或等于预设反应视距时,根据仿真信号灯的当前颜色和倒计时器的当前倒计时值,确定目标仿真车辆的加速度,从而基于该加速度进行自动驾驶仿真。如此,在进行交通仿真过程中,考虑了仿真信号灯和倒计时器,基于仿真信号灯的当前颜色和倒计时器的当前倒计时值来确定目标仿真车辆的加速度,从而能够准确的模型现实世界的场景,并且能够准确的模拟现实世界中车辆面对具有倒计时器时的各种决断过程,从而提高仿真结果的真实性和准确性。
- 还没有人留言评论。精彩留言会获得点赞!