一种深海采矿车推力智能优化装备及方法
本发明涉及海洋工程深海采矿装备及,具体涉及一种深海采矿车推力智能优化装备及方法。
背景技术:
1、陆地上所贮藏的稀有金属矿产资源,已满足不了我国日益增长的工业化需求,海洋稀有金属矿产资源丰富,为了克服未来的资源短缺问题,深海资源的开发已经成为了世界各大重要经济体的重要战略目标。我国海底多金属结核矿区为太平洋cc区,其中金属资源储量丰富,大约有4.2亿吨的金属结核量,结核的储量丰富。对于海底采矿有关装备的研发对我国来说有着十分重要的意义。
2、多金属结核又被称之为锰结核,其中富含锰、铜、钴等稀有金属资源,在海洋中的产量预计3万亿吨,是人类摆脱资源危机的重要方式,仅在我国在太平洋cc区分配的区域,矿产总储量就可解决我国近百年的矿产资源需求。深海中多金属结核的赋存环境与陆上以及近海环境不同,多金属结核多赋存于4000-6000 m深的高压、高盐环境。目前存在多种深海采矿技术,但无论是何种深海矿物的开采,深海采矿车都是一个核心组件。
3、多金属结核多赋存于4000-6000 m深的海底平原,通过深海采矿车收集多金属结核,然后利用海底输送技术通过立管将矿物提升至采矿船上,采矿车必须在稀软底质床面上稳定行走。深海稀软底质土不同于陆地土,承载能力很低,对扰动极为敏感,一次扰动强度有可能降低80%,沉积物颗粒极细,内摩擦角几乎为零。而且,深海平原也不是完全平坦的,也存在山坡、丘陵等,由于深海沉积物极其柔软,常常会遇到采矿车不均匀沉陷。同时,采矿车正常行进时遇到的水阻力及海流的也会对采矿车稳定性造成影响。
4、各种异常状况会影响采矿车的采集进度甚至会导致整个采矿系统的瘫痪,需要母船付出极大的代价才能帮助其脱困。现有的采矿车结构复杂,深海底质承载能力差,一旦遭遇异常状态或发生不均匀沉陷,仅靠采矿车自身难以脱困。因此,急需一种较为成熟、高效的深海采矿车稳定行进控制装置和方法,能够在采矿车发生异常状况时保证采矿作业不被中断,以提高深海采矿车在稀软底质的自适应能力,以满足海底采矿作业的要求。
5、基于以上存在的实际问题,现有专利及技术已对相应的深海采矿装置推力优化技术进行了一定设计,但仍然存在以下问题:
6、现有专利及技术中,螺旋桨大多配置在水下无人机中,深海履带式采矿车的螺旋桨姿态调整及不良工况的技术较少;
7、现有的专利及技术中,对于深海采矿车不均匀沉陷的研究多集中于沉陷、翘起某一方面脱困,未有针对不均匀沉陷及翘起得综合优化方案及技术;
8、现有专利及技术中,关于螺旋桨推力优化装置在深海复杂环境不同工况下的螺旋桨安装位置、推力角度及推力功率大小等,仍不明确;
9、现有的专利及技术中,螺旋推力优化装置对如何检测采矿车状态的技术存在不足,能够准确确定深海采矿车不均匀沉陷状态、翘起状态等监测技术较少;
10、现有专利及技术针对螺旋桨智能推进装置安装在深海采矿车上时,处于深海环境时的防水、防压及防腐蚀等问题技术较少。
技术实现思路
1、基于上述,本发明为克服现有技术的的不足,提出了一种深海采矿车智能推力优化装置及方法。该装置可自动探测采矿车发生的异常现象,并通过中心智能控制装置处理数据,控制螺旋推进装置控制螺旋桨方向及推力,实现采矿车推力优化,有效的解决了当采矿车处于异常状态或不良工况下的姿态调整及推力优化。
2、为实现上述目的,其技术方案如下:
3、一种深海采矿车智能推力优化装置及方法,包括以下步骤:
4、步骤(1),当海底采矿车在深海沉积物中行驶作业时,位于采矿车内的倾角传感器感知采矿车倾角、位于采矿车两边的距离传感器感知采矿车距离沉积物的距离,对采矿车的行驶状态进行主动感知,并将实时数据传递给中心智能控制装置;
5、步骤(2),中心智能控制装置接收到监测装置传来的实时数据后,将监测值与控制值进行比较,计算监测数据是否异常。当海底采矿车处于异常状态或发生不均匀沉陷时,中心智能控制装置检测到数据发生异常,对异常数据进行处理并判断异常类型;
6、步骤(3),中心控制装置对采矿车车身状态判断完毕后,根据沉陷、翘起两种典型不良工况,优选推进装置组合协同方式,选择合适的螺旋桨推力及推进角度协同履带进行推力分配;
7、步骤(4),针对四履带采矿车沉陷不良工况,采取以下方法:
8、① 采矿车沉降深度为0-15 cm时,且采矿车无倾斜时,采矿车处于持力层,无需推力优化装置助力,采矿车履带功率保持正常值,四履带采矿车前、后履带推力分配维持25-30 %、20-25 %;
9、② 采矿车沉降深度为15-25 cm时,采矿车轻微沉陷,尾部螺旋推进装置螺旋桨倾斜角度为向下30-45°,螺旋桨功率为0.5-0.6倍最大值,采矿车履带功率为1.1-1.3倍正常值,四履带采矿车前、后履带推力分配维持20-30%、20-30%,螺旋桨协同履带脱困;
10、③ 采矿车沉降深度大于25 cm时,采矿车严重沉陷,位于采矿车两侧和尾部的螺旋桨开始工作,两侧螺旋桨倾斜角度为向下45-60°、向后45-60°,尾部推力优化装置螺旋桨倾斜角度为向下45-60°,螺旋桨功率为最大值,采矿车履带功率为1.3-1.5倍正常值,四履带采矿车前、后履带推力分配维持20-25%、20-25%,螺旋桨协同履带脱困;
11、步骤(5),针对四履带采矿车翘起不良工况,采取以下方法:
12、① 前履带翘起:位于采矿车两侧的螺旋桨开始工作,两侧螺旋桨中l1、l2、r1、r2倾斜角度为向下0-30°、向前30-60°;l3、r3倾斜角度为向上0-30°、向前30-60°,尾部螺旋桨为0°,螺旋桨功率为最大值,采矿车履发动机功率为正常值;四履带采矿车前、后履带推力分配维持30-35%、15-20%,螺旋桨协同履带脱困;
13、② 后履带翘起:位于采矿车两侧及尾部的螺旋桨开始工作,两侧螺旋桨中l1、l2,r1、r2倾斜角度为向下0-30°、向后30-60°;l3,r3倾斜角度为向上0-30°、向后30-60°,尾部螺旋桨为向下0-30°,螺旋桨功率为最大值,采矿车履发动机功率为正常值;四履带采矿车前、后履带推力分配维持20-25%、25-30%,螺旋桨协同履带脱困;
14、步骤(6),中心智能控制装置将数据通过信号发送装置传递给推力优化装置,位于采矿车尾部及两端的旋转电机、螺旋推进器、履带开始工作;
15、步骤(7),随着采矿车螺推力优化装置的工作,采矿车逐渐脱离不良工况,当中心控制装置的收到的监测数据恢复正常值后,向推力优化装置发送电信号,螺旋推进装置恢复原位;
16、步骤(8),采矿车恢复正常行驶,推力优化装置继续给采矿车稳定行进提供动力,倾角传感器和距离传感器持续工作,以备下次出现的不良工况。
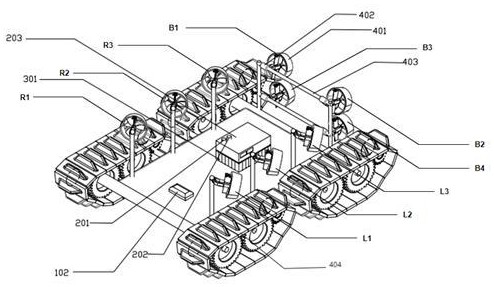
17、一种深海采矿车推力智能优化装备及方法,包括监测装置、中心智能控制装置、供能装置和推力优化装置组成,其监测装置包括倾角传感器和距离传感器,供能装置包括主电源和外置小型电源,推力优化装置包括连接杆、旋转电机、螺旋桨和履带。
18、一种深海采矿车推力智能优化装备及方法,所述的中心智能控制装置、倾角传感器均位于采矿车内部,依靠采矿车高强度铝合金外壳隔绝深海高压、高盐的环境,所述推力优化装置、距离传感器均位于采矿车外部依靠高强度铝合金绝缘外壳防止海水的渗入。
19、一种深海采矿车推力智能优化装备及方法,所述推力优化装置包括用于支撑的连接杆,用于转向的旋转电机和用于协同推进的螺旋桨、履带。旋转电机与信号接收器相连,可接收中心智能控制装置传递的电信号,调节螺旋桨角度。
20、一种深海采矿车推力智能优化装备及方法,所述推力优化装置中采矿车左右两边各安装三个螺旋桨用于调整行驶姿态,尾部装有四个螺旋桨用于调整姿态提供推力,选用敞口可智能调节角度的螺旋桨,且旋转电机可以控制螺旋桨120°旋转,调整采矿车姿态。
21、一种深海采矿车推力智能优化装备及方法,所述监测装置包括位于采矿车内部的倾角传感器和位于采矿车外部两边的距离传感器,其倾角安装于海底采矿车中心,用于监测实际采矿车车身倾斜角度。其距离传感器安装于采矿车底部两边,每边八个,共十六个,用于监测采矿车车身距离沉积物的距离。如上所述的监测装置内部设有信号发射器,可以将所得数据发送给中心控制装置。
22、一种深海采矿车推力智能优化装备及方法,所述中心智能控制装置位于采矿车内部,内置信号接收器和信号发送器,信号接收器收集监测装置传送过来的数据并进行实时处理,计算采矿车行进状况,并针对处理结果采取措施,向推力优化装置发送电信号。
23、一种深海采矿车推力智能优化装备及方法,所述供能装置包括位于采矿车内部的主电源及位于距离传感器内部的小型电源。主电源负责给倾角传感器、中心控制装置、推力优化装置供能,小型电源为距离传感器供能。
24、一种深海采矿车推力智能优化装备及方法,所述供能装置中主电源通过铝芯绝缘电线与各装置相连并供能,推力优化装置中铝芯绝缘电线位于连接杆内部与旋转电机及螺旋桨电机相连接。
25、一种深海采矿车推力智能优化装备及方法,所述推力优化装置中,旋转电机和螺旋桨安装于深海采矿车外部的连接杆上,螺旋桨内部有螺旋仪可以感知自己的位置。
26、本发明对深海采矿车推力优化进行了补充,提出了一种深海采矿车推力智能优化装备及方法,通过螺旋桨精确调控深海采矿车的行进姿态,并对采矿车推力进行了优化,保证了深海采矿过程的连续性和持久性,在采矿车处于异常状态(不均匀沉陷、翘起)时能够自主监测并摆脱困境,有效提高了海底矿车整体的采集效率。
27、本发明充分考虑了深海环境的复杂多变,完整、综合的考虑了采矿车遭遇的各种不良状况,采用可调节式的螺旋推进装置,实时调节螺旋推进装置的推力功率和角度,智能协同履带推力分配,保持采矿车的稳定行进。
28、本发明明确了深海采矿车螺旋桨智能推进装置在推力优化过程中各个装置的功能,采矿车内外装置安装的具体位置,及螺旋桨推力调节角度、推力大小,螺旋桨协调四履带采矿车履带推力分配优化方案及技术,并对整体系统实现过程中的具体实现步骤进行了详细说明。
29、本发明所述监测装置包括位于采矿车内部的倾角传感器和位于采矿车外部两边的距离传感器,倾角传感器负责监测采矿车倾斜角度,距离传感器负责监测采矿车距离沉积物的距离,二者通过信号发送器将所测数据传回中心智能控制装置,并通过中心智能控制装置对所测数据进行计算,实时判断深海采矿车状态。
30、本发明充分考虑了深海环境下的防水和防压等问题,中心控制装置、倾角传感器均位于采矿车内部,依靠采矿车高强度铝合金外壳隔绝深海高压、高盐的环境,螺旋推进装置、距离传感器均位于采矿车外部依靠高强度铝合金绝缘外壳防止海水的渗入。
- 还没有人留言评论。精彩留言会获得点赞!