一种基于H
一种基于h ∞
的机器人关节高效故障估计方法及装置
技术领域
1.本发明涉及机器人故障诊断技术领域,特别是指一种基于的机器人关节高效故障估计方法及装置。
背景技术:
2.工业机器人作为一种新型生产设备,一经问世便为人们的生产生活提供了诸多便利。随着机器人技术的不断发展,在医疗、汽车、国防军工等生产场合,机器人发挥着越来越重要的作用。但是由于机器人系统变得越来越复杂,而且实际生产过程中工业机器人长时间处于高负荷运转状态,这给机器人系统状态监测带来了不小的挑战。若不能及时对系统发生的故障进行发现、估计和诊断,可能会导致系统控制系统性能不稳定引起不可估计的严重损失。基于此种情况,人们将控制思想运用于机器人关节的故障观测器与容错控制器的设计,从而保证机器人在故障发生前后均有较好的控制效果。
3.但是在设计故障观测器对机器人关节进行故障观测时,可能出现故障观测器对故障不敏感的情况、动静态特性不好等不足。
技术实现要素:
4.本发明针对现有故障观测器的灵敏度不高、机器人关节控制系统的动静态特性较差的问题;以及普通故障观测器设计的保守性,采用传统的人工试凑效率低的问题,提出了本发明。
5.为解决上述技术问题,本发明提供如下技术方案:一方面,本发明提供了一种基于的机器人关节高效故障估计方法,该方法由电子设备实现,该方法包括:s1、设计优化问题可调的复合式加权灵敏度故障观测器。
6.s2、基于深度确定策略梯度算法ddpg算法,对复合式加权灵敏度故障观测器的加权函数进行优化。
7.s3、基于优化后的复合式加权灵敏度故障观测器,对机器人关节控制系统进行故障观测,得到机器人关节故障估计结果。
8.可选地,s1中的设计优化问题可调的复合式加权灵敏度故障观测器包括:s11、基于线性时不变lti系统,构造基于故障观测器的故障估计器。
9.s12、定义故障观测器的状态估计误差与故障观测误差。
10.s13、根据故障估计器、状态估计误差与故障观测误差,得到故障观测器方程。
11.s14、基于故障观测器方程,设计故障观测器的增益矩阵和,使得故障观测器误差系统稳定,且满足机器人关节控制系统外部扰动与故障信号的范数性能指标。
12.可选地,s13中的故障观测器方程,如下式(1)所示:
其中,为适当维数已知矩阵;为状态估计误差。
13.可选地,s14中的基于故障观测器方程,设计故障观测器的增益矩阵和,使得故障观测器误差系统稳定,且满足机器人关节控制系统外部扰动与故障信号的范数性能指标包括:s141、基于故障观测器方程,利用频率域回路整形方法选取加权函数,进而确定加权函数的状态空间实现。
14.s142、基于加权函数的状态空间实现,设计故障观测器的增益矩阵和,设计动态输出反馈控制器和,使得机器人关节控制系统故障信号到故障观测器误差的闭环传递函数的范数、以及外部干扰到故障观测器误差的闭环传递函数的范数最小,并且被控对象的输出能够跟踪给定参考指令信号。
15.可选地,加权函数包括灵敏度加权函数和、控制加权函数和以及补灵敏度加权函数和。
16.可选地,s142中的设计动态输出反馈控制器和包括:对于闭环传递函数,基于、以及的状态空间实现,构建广义被控对象的状态空间模型,对设计动态输出反馈控制器。
17.对于闭环传递函数,基于、以及的状态空间实现,构建广义被控对象的状态空间模型,对设计动态输出反馈控制器。
18.可选地,设计动态输出反馈控制器,以及设计动态输出反馈控制器,还包括:基于控制思想和广义内模控制原理,将积分器加入动态输出反馈控制器以及的控制通道中。
19.另一方面,本发明提供了一种基于的机器人关节高效故障估计装置,该装置应用于实现基于的机器人关节高效故障估计方法,该装置包括:设计模块,用于设计优化问题可调的复合式加权灵敏度故障观测器。
20.优化模块,用于基于深度确定策略梯度算法ddpg算法,对复合式加权灵敏度故障观测器的加权函数进行优化。
21.输出模块,用于基于优化后的复合式加权灵敏度故障观测器,对机器人关节控制系统进行故障观测,得到机器人关节故障估计结果。
22.可选地,设计模块,进一步用于:s11、基于线性时不变lti系统,构造基于故障观测器的故障估计器。
23.s12、定义故障观测器的状态估计误差与故障观测误差。
24.s13、根据故障估计器、状态估计误差与故障观测误差,得到故障观测器方程。
25.s14、基于故障观测器方程,设计故障观测器的增益矩阵和,使得故障观测器误差系统稳定,且满足机器人关节控制系统外部扰动与故障信号的范数性能指标。
26.可选地,故障观测器方程,如下式(1)所示:其中,为适当维数已知矩阵;为状态估计误差。
27.可选地,设计模块,进一步用于:s141、基于故障观测器方程,利用频率域回路整形方法选取加权函数,进而确定加权函数的状态空间实现。
28.s142、基于加权函数的状态空间实现,设计故障观测器的增益矩阵和,设计动态输出反馈控制器和,使得机器人关节控制系统故障信号到故障观测器误差的闭环传递函数的范数、以及外部干扰到故障观测器误差的闭环传递函数的范数最小,并且被控对象的输出能够跟踪给定参考指令信号。
29.可选地,加权函数包括灵敏度加权函数和、控制加权函数和以及补灵敏度加权函数和。
30.可选地,设计模块,进一步用于:对于闭环传递函数,基于、以及的状态空间实现,构建广义被控对象的状态空间模型,对设计动态输出反馈控制器。
31.对于闭环传递函数,基于、以及的状态空间实现,构建广义被控对象的状态空间模型,对设计动态输出反馈控制器。
32.可选地,设计模块,进一步用于:基于控制思想和广义内模控制原理,将积分器加入动态输出反馈控制器以及的控制通道中。
33.一方面,提供了一种电子设备,所述电子设备包括处理器和存储器,所述存储器中存储有至少一条指令,所述至少一条指令由所述处理器加载并执行以实现上述基于的机器人关节高效故障估计方法。
34.一方面,提供了一种计算机可读存储介质,所述存储介质中存储有至少一条指令,所述至少一条指令由处理器加载并执行以实现上述基于的机器人关节高效故障估计方法。
35.本发明实施例提供的技术方案带来的有益效果至少包括:上述方案中,设计一种优化问题可调的复合式加权灵敏度故障观测器对机器人关节控制系统进行观测,使故障观测器的灵敏度更高,机器人关节控制系统的动静态特性更好,鲁棒性更好。同时使用ddpg算法优化复合式加权灵敏度故障观测器的加权函数参数,克服了普通故障观测器设计的保守性,避免了传统的人工试凑,使机器人关节控制系统工作更加高效。
附图说明
36.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使
用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
37.图1是本发明实施例提供的基于的机器人关节高效故障估计方法流程示意图;图2是本发明实施例提供的闭环传递函数控制示意图;图3是本发明实施例提供的闭环传递函数控制示意图;图4是本发明实施例提供的复合式加权灵敏度系统结构示意图;图5是本发明实施例提供的基于ddpg的复合式加权灵敏度系统结构示意图;图6是本发明实施例提供的基于的机器人关节高效故障估计装置框图;图7是本发明实施例提供的一种电子设备的结构示意图。
具体实施方式
38.为使本发明要解决的技术问题、技术方案和优点更加清楚,下面将结合附图及具体实施例进行详细描述。
39.如图1所示,本发明实施例提供了一种基于的机器人关节高效故障估计方法,该方法可以由电子设备实现。如图1所示的基于的机器人关节高效故障估计方法流程图,该方法的处理流程可以包括如下的步骤:s1、设计优化问题可调的复合式加权灵敏度故障观测器。
40.可选地,上述步骤s1可以包括以下步骤s11-s14:s11、基于线性时不变lti系统,构造基于故障观测器的故障估计器。
41.一种可行的实施方式中,考虑系统执行器故障与外部扰动情况下,在关节机器人多胞型lpv(linear parameter-varying,线性变参数)系统顶点处,有下列lti(linear time invariant,线性时不变)系统,如下式(1)所示:其中,、、、、、,分别为系统状态,控制器输出,系统测量输出,性能目标函数,系统未知输入(系统外部扰动),与执行器故障信号,并且、为范数有界信号。并且系统矩阵均为适当维数已知矩阵。
42.假设系统可控,可检测。构造基于观测器的故障估计器,如下式(2)所示:其中,为观测器状态向量,、为需要求解的观测器参数矩阵。
43.s12、定义故障观测器的状态估计误差与故障观测误差。
44.一种可行的实施方式中,由于所设计故障观测器目标是使得观测器实际故障信号有尽可能的准确估计效果,令状态估计误差与故障观测误差为下式(3):由上式得:此外,将代入 ,可得:s13、根据故障估计器、状态估计误差与故障观测误差,得到故障观测器方程。
45.可选地,s13中的故障观测器方程,如下式(4)所示:其中,为适当维数已知矩阵;为状态估计误差。
46.s14、基于故障观测器方程,设计故障观测器的增益矩阵和,使得故障观测器误差系统稳定,且满足机器人关节控制系统外部扰动与故障信号的范数性能指标。
47.可选地,上述步骤s14可以包括下述步骤s141-s142:s141、基于故障观测器方程,利用频率域回路整形方法选取加权函数,进而确定加权函数的状态空间实现。
48.可选地,加权函数包括灵敏度加权函数和、控制加权函数和以及补灵敏度加权函数和。
49.一种可行的实施方式中,根据观测器的方程,可以将问题进一步转化为,设计观测器增益矩阵使得上述观测器误差系统稳定,且满足系统外部扰动与故障信号的性能指标。但是使用原来的性能指标存在灵敏度不高的问题,会导致机器人关节控制系统的动静态特性较差,因此本文利用频率域回路整形方法,选取和(灵敏度加权函数)、和(控制加权函数)、和(补灵敏度加权函数),设计观测器增益矩阵以及动态输出反馈控制器、,使得系统故障信号到观测器误差的闭环
传递函数的范数以及系统干扰到观测器误差的闭环传递函数的范数最小,并且对象输出 能够跟踪给定参考指令信号,利用此方法来解决上述问题。
50.其中,和(灵敏度加权函数)的选择由系统性能要求决定, 一般具有积分特性或高增益低通特性, 积分可以有效抑制系统超调量, 而适当提高增益可以增加频宽, 提高系统动态响应, 具有在低频段稳态跟踪输入信号和抑制外界低频扰动能力。
51.和(控制加权函数)的选择由系统不确定性的摄动范围来决定,一般主要用来约束鲁棒控制器的输出,加权灵敏度设计中可以通过对加权阵的选取实现对控制器信号幅值的限制。为了降低控制器的阶次,通常取控制加权函数为一常数, 从而保证了系统的频宽要求。
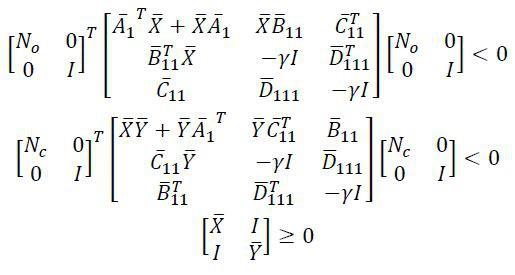
52.和(补灵敏度加权函数)的选择通常根据系统模型不确定性(未建模动态) 来选取,一般具有高通特性,且灵敏度加权函数和补灵敏度加权函数的频率尽可能不要重叠, 同时补灵敏度加权函数的选取阶次应不宜过大, 以免影响系统迭代速度及控制器阶数, 增加系统复杂度。
53.s142、基于加权函数的状态空间实现,设计故障观测器的增益矩阵和,设计动态输出反馈控制器和,使得机器人关节控制系统故障信号到故障观测器误差的闭环传递函数的范数、以及外部干扰到故障观测器误差的闭环传递函数的范数最小,并且被控对象的输出能够跟踪给定参考指令信号。
54.可选地,s142中的设计动态输出反馈控制器和包括:对于闭环传递函数,基于、以及 的状态空间实现,构建广义被控对象的状态空间模型,对设计动态输出反馈控制器。
55.一种可行的实施方式中,对于闭环传递函数有下式(5):进一步地,基于控制思想和广义内模控制原理,将积分器加入控制通道中,对设计加权灵敏度动态输出反馈控制器 ,使被控对象输出能够跟踪参考输入信号。对于,是满足要求的控制器。
56.涉、、状态空间实现分别为:,,,即:
另外,,令:,,,,。
57.按照标准控制问题结构,可得广义被控对象状态空间模型如下式(6)所示:其中,控制目标变为对设计动态输出反馈控制器,使得(1)闭环系统稳定;
(2)系统故障输入到评价信号的闭环传递函数的范数最小;(3)对象输出 能够跟踪给定参考指导信号。其控制示意图如图2所示。
58.对于闭环传递函数,基于、以及 的状态空间实现,构建广义被控对象的状态空间模型,对设计动态输出反馈控制器。
59.一种可行的实施方式中,闭环传递函数控制示意图如图3所示。
60.设、、状态空间实现分别为:,,,即:令:,,,,。
61.按照标准控制问题结构,可得广义被控对象状态空间模型如下式(7)所示:其中,
控制目标变为对设计动态输出反馈控制器,使得(1)闭环系统稳定;(2)系统扰动输入到评价信号的闭环传递函数的范数最小;(3)对象输出 能够跟踪给定参考指导信号。
62.引理:假设能稳能检测,则系统存在一个输出反馈次优 控制器当且仅当存在正定矩阵和,使得:其中:和分别是以子空间和中任意一组向量作为列向量所构成的矩阵,即满足:和和的矩阵和。
63.进一步地,基于以上理论,设计一种优化问题可调的复合式加权灵敏度动态输
出反馈控制器,其控制如图4所示,且其求解算法如下所示:(1)建立被控对象的状态空间模型;(2)根据期望性能,利用回路整形方法,在频率域内确定进而确定其状态空间实现。同时整形函数的阶数不能太复杂以保证控制器的阶数不至于太高。
64.(3)构造广义被控对象的状态空间模型,求解优化问题:满足:其中:和分别是以子空间和中任意一组向量作为列向量所构成的矩阵,即满足:和的矩阵和;和分别是以子空间和中任意一组向量作为列向量所构成的矩阵,即满足:和的矩阵和;为正定矩阵;和能稳能检测;和为权值系数且都为正常数,可根据系统的实际需求调整其大小。
65.基于复合式加权灵敏度控制思想对设计观测器增益矩阵以及最优动态输出反馈控制器、。则对于该系统,为所求的增益矩阵且、为所求的控制器。
66.s2、基于深度确定策略梯度算法ddpg算法,对复合式加权灵敏度故障观测器的加权函数进行优化。
67.一种可行的实施方式中,ddpg(deep deterministic policy gradient,深度确定策略梯度算法)是一种强化学习算法,在本机器人关节控制系统中,运用ddpg算法来优化和(灵敏度加权函数)、和(控制加权函数)、和(补灵敏度加权函数)
参数,克服了普通加权灵敏度故障观测器设计的保守性,避免了传统的人工试凑。
68.其算法具体流程如下:输入:初始化critic网络,actor网络的网络参数和;将critic、actor的参数拷贝给对应的目标网络函数(target) 和的参数:,初始化记忆库r容量。
69.对于每一条参数探索轨迹,for episode = 1,
…
,:初始化一个随机过程,用来给行为添加噪声;获得初始化状态;对于轨迹上的每一步,for t = 1,
……
,;根据当前策略的探索噪声,获得行为;执行行为,获得回报和下一个状态;将状态转换序列存储于记忆库r中;从r中随机采样个转换序列,作为online策略网络网络(critic)的一小批训练数据。表示单个转换序列。
70.令:;通过最小化损失函数,更新online critic网络函数;通过计算样本策略梯度,更新online actor网络参数。
71.通过滑动平均值更新目标网络参数和和单条轨迹结束,循环结束。
72.条轨迹结束,循环结束。
73.输出:最优网络参数和以及最优策略。
74.综合上文对基于理论故障观测器设计的分析和ddpg强化学习算法,结合机器关节多胞型lpv系统,本技术所设计的基于ddpg的优化问题可调的复合式加权灵敏度故障观测器控制结构图如图5所示。
75.由图5所示的控制系统求出最优的增益矩阵,既满足观测器误差系统稳定,又
满足系统外部扰动和故障信号的复合式加权灵敏度性能指标。
76.s3、基于优化后的复合式加权灵敏度故障观测器,对机器人关节控制系统进行故障观测,得到机器人关节故障估计结果。
77.本发明实施例中,设计了一种优化问题可调的复合式加权灵敏度故障观测器对机器人关节控制系统进行观测,使故障观测器的灵敏度更高,机器人关节控制系统的动静态特性更好,鲁棒性更好。同时使用ddpg算法优化复合式加权灵敏度故障观测器的加权函数参数,克服了普通故障观测器设计的保守性,避免了传统的人工试凑,使机器人关节控制系统工作更加高效。
78.如图6所示,本发明实施例提供了一种基于 的机器人关节高效故障估计装置600,该装置600应用于实现基于的机器人关节高效故障估计方法,该装置600包括:设计模块610,用于设计优化问题可调的复合式加权灵敏度故障观测器。
79.优化模块620,用于基于深度确定策略梯度算法ddpg算法,对复合式加权灵敏度故障观测器的加权函数进行优化。
80.输出模块630,用于基于优化后的复合式加权灵敏度故障观测器,对机器人关节控制系统进行故障观测,得到机器人关节故障估计结果。
81.可选地,设计模块610,进一步用于:s11、基于线性时不变lti系统,构造基于故障观测器的故障估计器。
82.s12、定义故障观测器的状态估计误差与故障观测误差。
83.s13、根据故障估计器、状态估计误差与故障观测误差,得到故障观测器方程。
84.s14、基于故障观测器方程,设计故障观测器的增益矩阵和,使得故障观测器误差系统稳定,且满足机器人关节控制系统外部扰动与故障信号的范数性能指标。
85.可选地,故障观测器方程,如下式(1)所示:其中,为适当维数已知矩阵;为状态估计误差。
86.可选地,设计模块610,进一步用于:s141、基于故障观测器方程,利用频率域回路整形方法选取加权函数,进而确定加权函数的状态空间实现。
87.s142、基于加权函数的状态空间实现,设计故障观测器的增益矩阵和,设计动态输出反馈控制器和,使得机器人关节控制系统故障信号到故障观测器误差的闭环传递函数的范数、以及外部干扰到故障观测器误差的闭环传递函数的范数最小,并且被控对象的输出能够跟踪给定参考指令信号。
88.可选地,加权函数包括灵敏度加权函数和、控制加权函数和以及补灵敏度加权函数和。
89.可选地,设计模块610,进一步用于:对于闭环传递函数,基于、以及的状态空间实现,构建广义被控
对象的状态空间模型,对设计动态输出反馈控制器。
90.对于闭环传递函数,基于、以及的状态空间实现,构建广义被控对象的状态空间模型,对设计动态输出反馈控制器。
91.可选地,设计模块610,进一步用于:基于控制思想和广义内模控制原理,将积分器加入动态输出反馈控制器以及的控制通道中。
92.本发明实施例中,设计了一种优化问题可调的复合式加权灵敏度故障观测器对机器人关节控制系统进行观测,使故障观测器的灵敏度更高,机器人关节控制系统的动静态特性更好,鲁棒性更好。同时使用ddpg算法优化复合式加权灵敏度故障观测器的加权函数参数,克服了普通故障观测器设计的保守性,避免了传统的人工试凑,使机器人关节控制系统工作更加高效。
93.图7是本发明实施例提供的一种电子设备700的结构示意图,该电子设备700可因配置或性能不同而产生比较大的差异,可以包括一个或一个以上处理器(central processing units,cpu)701和一个或一个以上的存储器702,其中,存储器702中存储有至少一条指令,至少一条指令由处理器701加载并执行以实现下述基于的机器人关节高效故障估计方法:s1、设计优化问题可调的复合式加权灵敏度故障观测器。
94.s2、基于深度确定策略梯度算法ddpg算法,对复合式加权灵敏度故障观测器的加权函数进行优化。
95.s3、基于优化后的复合式加权灵敏度故障观测器,对机器人关节控制系统进行故障观测,得到机器人关节故障估计结果。
96.在示例性实施例中,还提供了一种计算机可读存储介质,例如包括指令的存储器,上述指令可由终端中的处理器执行以完成上述基于的机器人关节高效故障估计方法。例如,计算机可读存储介质可以是rom、随机存取存储器(ram)、cd-rom、磁带、软盘和光数据存储设备等。
97.本领域普通技术人员可以理解实现上述实施例的全部或部分步骤可以通过硬件来完成,也可以通过程序来指令相关的硬件完成,所述的程序可以存储于一种计算机可读存储介质中,上述提到的存储介质可以是只读存储器,磁盘或光盘等。
98.以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1