一种室内分布式灯光机器人集群控制方法与流程
1.本发明属于集群控制技术领域,尤其涉及一种室内分布式灯光机器人集群控制方法。
背景技术:
2.集群研究现在越来越广泛,但是现有的集群大多数采用集中式控制:即指令的分发均由中心服务器发出,同时集群个体将各自的信息回传至中心服务器,然后中心服务器接受到集群个体的信息进行计算,再对每个集群个体发送指令,从而控制整个集群。这样会导致中心服务器负载较大,资源分配不合理等问题。
技术实现要素:
3.本发明提供一种室内分布式灯光机器人集群控制方法,旨在解决上述存在的问题。
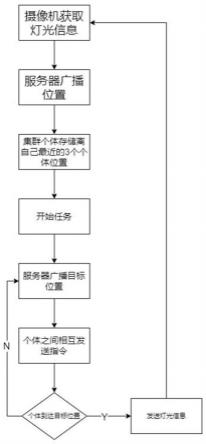
4.本发明是这样实现的,一种室内分布式灯光机器人集群控制方法,包括设置在室内空间的摄像机、服务器和多个机器人,所述摄像机和机器人分别与所述服务器无线通信,所述机器人之间无线通信,每个所述机器人上分别安装有彩色灯带,控制方法具体包括:s1、每个机器人在初始位置控制彩色灯带工作,其中,灯光颜色代表机器人的编号;s2、以摄像头为基准,在室内空间建立坐标系,摄像头采集机器人的灯光信息,并传输至服务器,所述灯光信息包括灯光颜色和灯光所在摄像区域位置;s3、服务器获取灯光信息,识别机器人编号并计算出机器人的当前位置信息,且将所有机器人对应的当前位置信息进行实时广播;s4、每个机器人接收广播信息,将自身编号对应的当前位置信息,以及距离自己最近三个机器人的编号和当前位置信息,存储在自身内存中,并结束彩色灯带工作;s5、服务器将每个机器人的目标位置信息进行广播,每个机器人接收并传递广播信息,相邻机器人之间相互发送控制指令,使每个机器人移动到目标位置;s6、当机器人到达目标位置后,控制彩色灯带工作,摄像头采集灯光信息传输至服务器,服务器计算机器人的位置信息,并确认机器人到达目标位置。
5.进一步的,在步骤s5中,具体包括:最先接受到广播信息的机器人i向周围的机器人传递广播信息,机器人i内存中储存有编号为x、y、z的3个机器人的当前位置信息,当接收到服务器广播的所有机器人的目标位置信息后,机器人i提取机器人x的当前位置信息和目标位置信息进行计算,并生成控制指令发送至机器人x;机器人x接受到广播信息并向周围的机器人传递广播信息,机器人x内存中储存有编号为m、n、r的3个机器人的当前位置信息,机器人x提取机器人m的当前位置信息和目标位置信息进行计算,并生成控制指令发送至机器人m;同时,机器人x接收控制指令开始移动;
以此类推;机器人k接受到广播信息并向周围的机器人传递广播信息,机器人k内存中储存有编号为a、b、c的3个机器人的当前位置信息,机器人k提取机器人a的当前位置信息和目标位置信息进行计算,并生成控制指令发送至机器人a;若机器人a已接收其他机器人发送的控制指令,则机器人k提取机器人b的当前位置信息和目标位置信息进行计算,并生成控制指令发送至机器人b;若机器人b已接收其他机器人发送的控制指令,则机器人k提取机器人c的当前位置信息和目标位置信息进行计算,并生成控制指令发送至机器人c;同时,机器人k接收控制指令开始移动;直至所有机器人均已接收到控制指令。
6.进一步的,所述机器人为六边形差速机器人。
7.进一步的,所述机器人之间通过红外线通信。
8.进一步的,在步骤s6中,服务器计算机器人的位置信息,并确认机器人到达目标位置,具体包括:若位置信息与目标位置信息吻合,服务器生成对应机器人的确认信息并进行广播,机器人接收到确认信息后停止工作;若位置信息与目标位置信息不吻合,服务器再次发送对应机器人的位置信息和目标位置信息并进行广播,存储有对应机器人编号的机器人接收广播信息,并向其发送控制指令,使对应机器人移动到目标位置。
9.与现有技术相比,本发明的有益效果是:本发明公开的一种室内分布式灯光机器人集群控制方法,服务器不参与集群运作的计算,仅仅收集和分发消息。服务器主机仅收集集群中个体的位置信息,并同时进行广播,以及发布目标点。集群个体接受广播信息,从而获得相对位置,然后再由某一个个体向周围个体发送控制指令,从而减少中心服务器的运算压力,进而实现分布式控制。
附图说明
10.图1为本发明方法流程图;图2为本发明系统架设结构图;图3为本发明机器人初始位置图;图4为本发明机器人目标位置图。
11.图中:11-机器人、12-摄像机、13-服务器。
具体实施方式
12.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
13.在本发明的描述中,需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限
制。此外,在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
实施例
14.请参阅图1,本发明提供一种技术方案:一种室内分布式灯光机器人集群控制方法,包括设置在室内空间的摄像机12、服务器13和多个机器人11,所述摄像机12和机器人11分别与所述服务器13无线通信,所述机器人11之间无线通信,每个所述机器人11上分别安装有彩色灯带,控制方法具体包括:s1、每个机器人在初始位置控制彩色灯带工作,其中,灯光颜色代表机器人的编号;s2、以摄像头为基准,在室内空间建立坐标系,摄像头采集机器人的灯光信息,并传输至服务器,所述灯光信息包括灯光颜色和灯光所在摄像区域位置;s3、服务器获取灯光信息,识别机器人编号并计算出机器人的当前位置信息,且将所有机器人对应的当前位置信息进行实时广播;s4、每个机器人接收广播信息,将自身编号对应的当前位置信息,以及距离自己最近三个机器人的编号和当前位置信息,存储在自身内存中,并结束彩色灯带工作;s5、服务器将每个机器人的目标位置信息进行广播,每个机器人接收并传递广播信息,相邻机器人之间相互发送控制指令,使每个机器人移动到目标位置;s6、当机器人到达目标位置后,控制彩色灯带工作,摄像头采集灯光信息传输至服务器,服务器计算机器人的位置信息,并确认机器人到达目标位置。
15.在步骤s5中,具体包括:最先接受到广播信息的机器人i向周围的机器人传递广播信息,机器人i内存中储存有编号为x、y、z的3个机器人的当前位置信息,当接收到服务器广播的所有机器人的目标位置信息后,机器人i提取机器人x的当前位置信息和目标位置信息进行计算,并生成控制指令发送至机器人x;机器人x接受到广播信息并向周围的机器人传递广播信息,机器人x内存中储存有编号为m、n、r的3个机器人的当前位置信息,机器人x提取机器人m的当前位置信息和目标位置信息进行计算,并生成控制指令发送至机器人m;同时,机器人x接收控制指令开始移动;以此类推;机器人k接受到广播信息并向周围的机器人传递广播信息,机器人k内存中储存有编号为a、b、c的3个机器人的当前位置信息,机器人k提取机器人a的当前位置信息和目标位置信息进行计算,并生成控制指令发送至机器人a;若机器人a已接收其他机器人发送的控制指令,则机器人k提取机器人b的当前位置信息和目标位置信息进行计算,并生成控制指令发送至机器人b;若机器人b已接收其他机器人发送的控制指令,则机器人k提取机器人c的当前位置信息和目标位置信息进行计算,并生成控制指令发送至机器人c;同时,机器人k接收控制指令开始移动;直至所有机器人均已接收到控制指令。
16.在步骤s6中,服务器计算机器人的位置信息,并确认机器人到达目标位置,具体包括:若位置信息与目标位置信息吻合,服务器生成对应机器人的确认信息并进行广
播,机器人接收到确认信息后停止工作;若位置信息与目标位置信息不吻合,服务器再次发送对应机器人的位置信息和目标位置信息并进行广播,存储有对应机器人编号的机器人接收广播信息,并向其发送控制指令,使对应机器人移动到目标位置。
17.试验例如图2所示,在室内区域搭建控制系统,包括一台摄像机、6个机器人(分别编号为1号、2号、3号、...、6号)和一台服务器。
18.其中,服务器与摄像机之间、服务器与6个机器人之间、6个机器人之间均可以通信;当任务开始前,摄像头会采集机器人灯光信息(传递机器人编号),服务器通过相机的内外参数计算出机器人的当前位置,并将位置广播。机器人将会接受广播,将自身编号和位置信息以及离自己最近的三个机器人的编号和位置均记录在自身内存中。
19.如图3所示,摄像区域内有6辆机器人,距离1号机器人最近的三辆为2,3,4号机器人;距离2号最近的为1,3,5号机器人;距离3号最近的为1,4,6号机器人;依次类推,集群个体存储离自己最近的3个个体的位置信息。
20.任务开始后,服务器将会发布最终的位置信息,如图4所示;由于最终位置是确定的,因此各个个体之间的相对位置也是确定的。由于服务器不参与运算,而机器人本身存储了初始值,同时也知道目标值。因此,机器人本身就会进行运算,机器人之间通过红外发送和接受装置,接受指令。
21.例如:要想让图3中的6号车走到图4中的位置。由于离6号车最近的是5号车,此时5号车将会通过红外发射装置发送控制指令,让6号车运动到目标位置。并且在运动过程中6号车会通过红外发射装置实时将距离信息发送给5号车。从而实现了机器人之间的数据交互和通信。
22.以上仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1