一种机电式发射架起竖控制系统的制作方法
1.本发明涉及起竖控制技术领域,尤其是一种机电式发射架起竖控制系统。
背景技术:
2.发射架机动性是指在规定条件下,发射架的工作状态经快速撤收、运输到另一场所并重新展开恢复到工作状态所消费的人力和时间。随着地面装备的机动性和瞄准精度的要求越来越高,传统的设备已经不能满足发射架在速度和精度上的要求。
3.目前,国内具有起竖功能的设备很多,大部分采用的控制器是plc,在恶劣工作环境的要求下,如高湿度,浓盐雾,强振动,低温高温条件下,尤其在高低温方面,许多plc不满足工作条件;在大负载装置上,起竖缸大多采用的是液压缸,液压缸在漏油维护上是个难题,而且控制精度比较差,在运动过程中易出现抖动的现象,影响发射架起竖的流畅性,响应比较迟钝,一旦出现故障,在短时间内无法恢复;控制面板在方舱内时,观测不便,很容易在发射架出现卡死或者超限时不能及时停止设备的情况,从而影响起竖的精度,甚至不能正常完成起竖。
技术实现要素:
4.为解决上述技术问题,本发明提供了一种机电式发射架起竖控制系统。
5.本发明通过以下技术方案得以实现:
6.一种机电式发射架起竖控制系统,包括:
7.限位开关,所述限位开关用于在起竖装置到达指定位置时产生对应的开关信号;
8.一体化伺服电机,与限位开关相连,接收限位开关的开关信号执行相应的动作;
9.角编码器,所述角编码器用于采集起竖装置的实时角度信号;
10.伺服控制组合,所述伺服控制组合分别与一体化伺服电机和角编码器相连,伺服控制组合用于接收一体化伺服电机的开关信息、角编码器采集到的起竖装置的实时角度信号。
11.控制组合,所述控制组合与伺服控制组合相连。
12.所述控制组合包括控制器pcc和控制软件。
13.还包括上位机,所述上位机与控制组合相连。
14.还包括面板指示灯,所述面板指示灯与伺服控制组合相连。
15.所述限位开关安装在起竖装置上。
16.所述角编码器安装在起竖装置的轴上。
17.所述一体化伺服电机包括电动缸,电动缸用于实现对起竖装置的起竖控制
18.所述限位开关包括上限位开关和下限位开关,上限位开关在起竖装置位于90
°
时生成开关信号,下限位开关在起竖装置位于0
°
时生成开关信号。
19.本发明的有益效果在于:
20.通过控制器pcc以及相关模块采集一体化伺服电机中伺服控制器的信息和角编码
器的数据,得到发射架起竖的角度及起竖电动缸的当前状态信息,来控制一体化伺服电机的运动,从而实现起竖电动缸的动作,可以在30s内稳定且快速地完成发射架展开和起竖,采用上位机显示实时监测发射架起竖过程中发射架角度的状态。使用电动缸取代液压缸去执行发射架的起竖工作,解决了液压缸漏油不易维护、控制精度较差和响应迟钝的缺点,具有结构简单、控制灵活、可靠性高、易于维护的优点。
附图说明
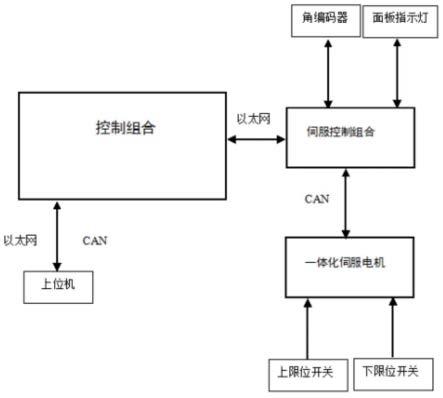
21.图1是本发明的系统示意图;
具体实施方式
22.下面进一步描述本发明的技术方案,但要求保护的范围并不局限于所述。
23.一种机电式发射架起竖控制系统,包括限位开关、一体化伺服电机、伺服控制组合、控制组合和角编码器,其中,限位开关用于在起竖装置到达指定位置时产生对应的开关信号;角编码器用于采集起竖装置的实时角度信号;一体化伺服电机与限位开关相连,接收限位开关的开关信号并执行相应的动作;伺服控制组合分别与一体化伺服电机和角编码器相连,伺服控制组合负责接收来自角编码器的起竖装置的实时角度信号、一体化伺服电机状态信息;控制组合与伺服控制组合相连,负责下传指令信号。
24.限位开关用于电动缸的行程保护,限位开关实时监测起竖装置中发射架的位置,在发射架处于0
°
位置,即发射架与安装平面平行时,下限位开关发出开关信息至一体化伺服电机,并通过can总线发给伺服控制组合,伺服控制组合将开关信息经以太网发送至控制组合;当发射架处于90
°
位置,即发射架与安装平面垂直时,上限位开关发出开关信息至一体化伺服电机,并通过can总线发给伺服控制组合,伺服控制组合将开关信息经以太网发送至控制组合。随后控制组合进行判断,并将判断结果返回至一体化伺服电机,控制电动缸的动作。
25.控制系统还包括上位机,为方便检测与控制,在上位机设计了触屏及显示控制功能,还可以外接鼠标控制上位机。上位机实时显示发射架的角度数据,并能通过上位机直接输入角度数据,通过实时控制电动缸的运转和停止,从而使发射架起竖到对应的角度。使用电动缸取代液压缸去执行发射架的起竖工作,解决了液压缸漏油、控制精度较差和响应迟钝等缺点。
26.控制组合为本发明的核心控制系统,控制组合包括控制器pcc和控制软件,该控制软件集成上位机显示与控制、信号的分析与处理、发射架起竖控制等功能为一体。其中,该控制软件能实时响应来自上位机的操作指令,分析操作指令并发出对应的控制指令;以发射架起竖动作开始为例,控制软件接收来自上位机的发射架起竖的预期角度,将预期角度与控制软件监测到的发射架当前角度进行比对,得出发射架到达预期角度所需执行的动作,控制软件将结果作为指令输出,一体化伺服电机执行相应的动作使发射架到达预期角度位置,并将执行结果返回至控制软件。并且在这一过程中,发射架的动作状态会实时返回至控制软件,若检测到发射架起竖速度、角度异常,控制软件会发出反馈信号,以此消除发射架起竖过程中的异常情况。
27.当控制系统出现故障时,模块化的结构设计能够保障发射架正常起竖,控制器pcc
可以快速更换维修,并能够在恶劣的环境下正常工作,解决了以plc作为控制器无法在高低温等恶劣条件下工作的缺点。
28.伺服控制组合对角编码器的角度数据、一体化伺服电机信息、以及上限位接近开关和下限位接近开关的信息并进行处理,输出控制参数和开关量,执行相应的动作,伺服控制组合将动作数据反馈给控制组合。同时角编码器的数据信息经总线接入伺服控制组合内,并通过以太网传至控制器pcc,控制器pcc计算发射架当前的角度并进行滤波处理;伺服控制组合将发射架起竖系统当前的状态信息经过数字量输出模块发送到面板指示灯,指示灯根据发射架起竖系统的不同状态显示不同的变化,如发射架静止状态下指示灯为绿色,发射架在运动状态下指示灯为红色,发射架在从平行与安装面到垂直与安装面的运动过程中,指示灯的闪烁频率逐渐加快,以提醒在发射架周围工作的工作人员发射架将进入下一工作状态。
29.结合上述的工作原理,发射架在静止状态和工作状态下的工作过程为:
30.发射架静止状态下:角编码器将所得数据通过总线反馈给伺服控制组合,伺服控制组合通过计算得到当前角度值,该角度值为执行值,并将执行值通过以太网发送至控制组合,控制组合收到伺服控制组合的执行值且判断上位机未发送发射架角度控制值时,将执行值作为角度值发送至伺服控制组合,伺服控制组合收到控制值后,对比判断控制值和执行值为同一数值,则发射架不执行动作。
31.发射架工作状态下:发射架执行动作的前提是接收到来自上位机的角度控制值,在非工作状态下,来自角编码器的执行值作为角度控制值。控制组合接收到来自上位机的角度控制值后,将该角度控制值通过以太网发送至伺服控制组合,伺服控制组合将角度控制值与执行值对比,若角度控制值与执行值相同,则发射架不执行动作;若角度控制值与执行值不同,则将角度控制值通过can总线发送至一体化伺服电机,一体化伺服电机控制发射架调转到目标角度。发射架可在9秒内展开,并且发射架起竖速度控制在每秒15
°
,发射架起竖范围在0
°‑
90
°
之间,发射架在30秒内便可完成展开和起竖工作。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1