控制系统、控制方法、以及储存程序的非临时性存储介质与流程
本公开涉及一种控制系统、控制方法、以及储存程序的非临时性存储介质。
背景技术:
1、在日本特开2021-86199中,公开了一种具备输送机器人的自主移动系统。
技术实现思路
1、对于这样的输送机器人而言,期望更高效地对输送物进行输送。例如,在输送机器人的周围存在人的情况下,期望输送机器人以对人进行回避的方式来进行移动。然而,由于对人的动作进行预测较为困难,因此有时会无法实施输送机器人的适当的控制。例如,在周边存在人的状况下,需要使输送机器人以低速来移动。因此,期望进行用于使输送机器人更高效地移动的控制。
2、本公开提供一种能够根据状况来实施适当的控制的控制系统、控制方法、以及储存程序的非临时性存储介质。
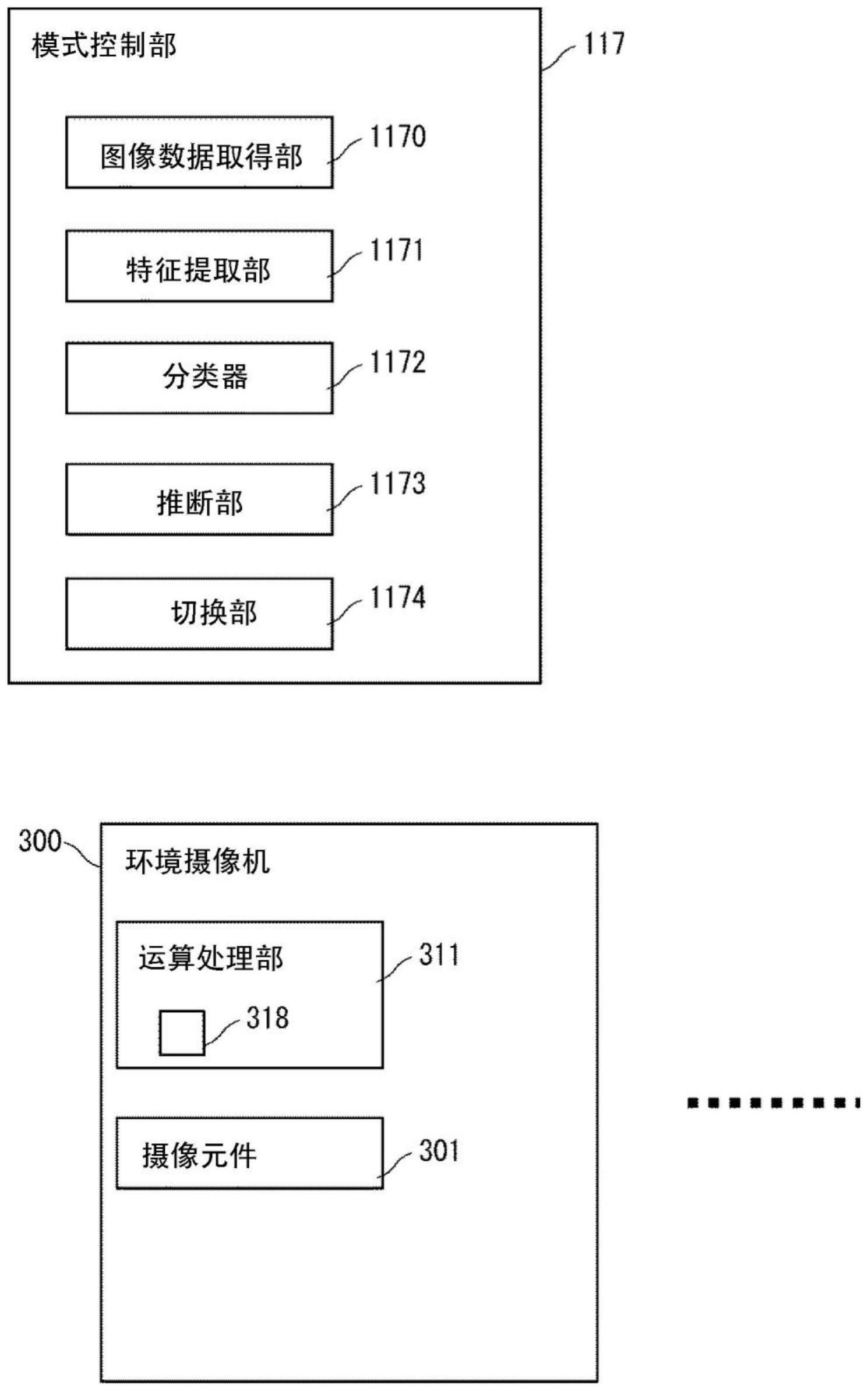
3、本公开的一个方式所涉及的控制系统具备一个或一个以上的处理器。所述一个或一个以上的处理器被构成为,对摄像机所拍摄到的拍摄图像内的人的特征进行提取;基于所述特征,而将所述人分类至被预先设定的第一群组或第二群组;对属于所述第二群组的人的移动速度进行推断;并且根据所述移动速度,作为模式而对实施高负载的处理的高负载模式、和实施与所述高负载模式相比为低负载的处理的低负载模式进行切换。
4、在上述的控制系统中,也可以采用如下方式,即,所述一个或一个以上的处理器使用机器学习模型而实施所述第一群组和所述第二群组的分类。
5、在上述的控制系统中,也可以采用如下方式,即,所述一个或一个以上的处理器根据所述模式而对分类用的所述机器学习模型的网络层进行改变。
6、在上述的控制系统中,也可以采用如下方式,即,所述一个或一个以上的处理器根据属于所述第二群组的人的移动方向而对所述模式进行切换。
7、在上述的控制系统中,也可以采用如下方式,即,所述一个或一个以上的处理器根据所述模式而对所述摄像机所拍摄的图像的像素数、所述摄像机的帧率、gpu的使用核数、以及gpu的使用率上限进行改变。
8、在上述的控制系统中,也可以采用如下方式,即,在所述高负载模式下被构成为,由服务器从多个所述摄像机收集图像并实施处理,在所述低负载模式下被构成为,由被设置在所述摄像机中的边缘设备来单独地实施处理。
9、在上述的控制系统中,也可以采用如下方式,即,还具备以在设施内进行移动的方式而被构成的移动机器人,所述一个或一个以上的处理器根据对属于所述第二群组的人的移动进行辅助的辅助者的有无,来对所述移动机器人的控制进行切换。
10、在上述的控制系统中,也可以采用如下方式,即,所述一个或一个以上的处理器在设置有多个所述摄像机的设施中,在所述低负载模式下使一部分所述摄像机休眠。
11、本公开的一个方式所涉及的控制方法为,对摄像机所拍摄到的拍摄图像内的人的特征进行提取;基于所述特征,而将所述人分类至被预先设定的第一群组或第二群组;对属于所述第二群组的人的移动速度进行推断;根据所述移动速度,作为模式而对实施高负载的处理的高负载模式、和实施与所述高负载模式相比为低负载的处理的低负载模式进行切换。
12、在上述的控制方法中,也可以采用如下方式,即,使用机器学习模型而实施所述第一群组和所述第二群组的分类。
13、在上述的控制方法中,也可以采用如下方式,即,根据所述模式而对所述机器学习模型的网络层进行改变。
14、在上述的控制方法中,也可以采用如下方式,即,根据属于所述第二群组的人的移动方向而对所述模式进行切换。
15、在上述的控制方法中,也可以采用如下方式,即,根据所述模式而对所述摄像机所拍摄的图像的像素数、所述摄像机的帧率、gpu的使用核数、以及gpu的使用率上限进行改变。
16、在上述的控制方法中,也可以采用如下方式,即,在所述高负载模式下被构成为,由服务器从多个所述摄像机收集图像并实施处理,在所述低负载模式下被构成为,由被设置在摄像机中的边缘设备单独地实施处理。
17、在上述的控制方法中,也可以采用如下方式,即,根据对属于所述第二群组的人的移动进行辅助的辅助者的有无,来对以在设施内进行移动的方式而被构成的移动机器人的控制进行切换。
18、在上述的控制方法中,也可以采用如下方式,即,在设置有多个所述摄像机的设施中,在所述低负载模式下使一部分所述摄像机休眠。
19、本公开的一个方式所涉及的储存程序的非临时性存储介质储存用于使计算机执行控制方法的程序,在所述控制方法中,对摄像机所拍摄到的拍摄图像内的人的特征进行提取,基于所述特征,而将所述人分类至被预先设定的第一群组或第二群组,对属于所述第二群组的人的移动速度进行推断,根据所述移动速度,作为模式而对实施高负载的处理的高负载模式、和实施与所述高负载模式相比为低负载的处理的低负载模式进行切换。
20、在上述的储存程序的非临时性存储介质中,也可以采用如下方式,即,在所述控制方法中,使用机器学习模型而实施所述第一群组和所述第二群组的分类。
21、在上述的储存程序的非临时性存储介质中,也可以采用如下方式,即,在所述控制方法中,根据所述模式而对分类用的所述机器学习模型的网络层进行改变。
22、在上述的储存程序的非临时性存储介质中,也可以采用如下方式,即,在所述控制方法中,根据属于所述第二群组的人的移动方向而对所述模式进行切换。
23、在上述的储存程序的非临时性存储介质中,也可以采用如下方式,即,在所述控制方法中,根据所述模式而对所述摄像机所拍摄的图像的像素数、所述摄像机的帧率、gpu的使用核数、以及gpu的使用率上限进行改变。
24、在上述的储存程序的非临时性存储介质中,也可以采用如下方式,即,在所述控制方法中,在所述高负载模式下由服务器从多个所述摄像机收集图像并实施处理,在所述低负载模式下,由被设置在所述摄像机中的边缘设备单独地实施处理。
25、在上述的储存程序的非临时性存储介质中,也可以采用如下方式,即,在所述控制方法中,根据对属于所述第二群组的人的移动进行辅助的辅助者的有无,来对以在设施内进行移动的方式而被构成的移动机器人的控制进行切换。
26、在上述的储存程序的非临时性存储介质中,也可以采用如下方式,即,在所述控制方法中,在设置有多个所述摄像机的设施中,在所述低负载模式下使一部分所述摄像机休眠。
27、根据本公开,可提供一种能够根据状况而高效地实施控制的控制系统、控制方法、以及储存程序的非临时性存储介质。
技术特征:
1.一种控制系统,其中,
2.如权利要求1所述的控制系统,其特征在于,
3.如权利要求2所述的控制系统,其特征在于,
4.如权利要求1至3中的任意一项所述的控制系统,其特征在于,
5.如权利要求1至4中的任意一项所述的控制系统,其特征在于,
6.如权利要求1至5中的任意一项所述的控制系统,其特征在于,
7.如权利要求1至6中的任意一项所述的控制系统,其特征在于,
8.如权利要求1至7中的任意一项所述的控制系统,其特征在于,
9.一种控制方法,其特征在于,包括:
10.如权利要求9所述的控制方法,其特征在于,
11.如权利要求10所述的控制方法,其特征在于,
12.如权利要求9至11中的任意一项所述的控制方法,其特征在于,
13.如权利要求9至12中的任意一项所述的控制方法,其特征在于,
14.如权利要求9至13中的任意一项所述的控制方法,其特征在于,
15.如权利要求9至14中的任意一项所述的控制方法,其特征在于,
16.如权利要求9至15中的任意一项所述的控制方法,其特征在于,
17.一种储存程序的非临时性存储介质,所述程序用于使计算机执行控制方法,其中,
18.如权利要求17所述的储存程序的非临时性存储介质,其特征在于,
19.如权利要求18所述的储存程序的非临时性存储介质,其特征在于,
20.如权利要求17至19中的任意一项所述的储存程序的非临时性存储介质,其特征在于,
21.如权利要求17至20中的任意一项所述的储存程序的非临时性存储介质,其特征在于,
22.如权利要求17至21中的任意一项所述的储存程序的非临时性存储介质,其特征在于,
23.如权利要求17至22中的任意一项所述的储存程序的非临时性存储介质,其特征在于,
24.如权利要求17至23中的任意一项所述的储存程序的非临时性存储介质,其特征在于,
技术总结
本公开涉及一种控制系统、控制方法、以及储存程序的非临时性存储介质。控制系统具备一个或一个以上的处理器。一个或一个以上的处理器被构成为,对摄像机所拍摄到的拍摄图像内的人的特征进行提取;基于特征,而将人分类至被预先设定的第一群组或第二群组;对属于第二群组的人的移动速度进行推断;根据移动速度,作为模式而对实施高负载的处理的高负载模式、和实施与高负载模式相比为低负载的处理的低负载模式进行切换。
技术研发人员:吉川惠,小田志朗,清水奖,松井毅
受保护的技术使用者:丰田自动车株式会社
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!