一种全局固定时间Lyapunov稳定性分析方法
一种全局固定时间lyapunov稳定性分析方法
技术领域
1.本发明涉及非线性系统和固定时间控制的技术领域,具体设计一种全局固定时间lyapunov稳定性分析方法。
背景技术:
2.在控制系统的性能指标中,收敛性能是很关键的一个指标,从控制系统收敛时间优化的角度出发,能够使闭环系统在有限时间内收敛的控制方法才是时间最优的控制方法。有限时间控制除了收敛性能最优的优点之外,由于控制器中分数幂项的存在,使得有限时间闭环控制系统与非有限时间闭环控制系统相比,具有更好的鲁棒性和抗扰动性。虽然有限时间控制能够使系统在有限时间内收敛,但收敛时间大概率和初始状态有关,并随初始状态的增加而增加,这大大限制了它的适用范围。
3.相比较于有限时间控制,固定时间控制在保留了有限时间控制收敛速度快、收敛精度高等优点的同时,还具有收敛时间不依赖于系统初始状态的特性,因此受到学者们的广泛关注。正是因为固定时间控制的诸多优点,近年来关于非完整系统的固定时间的控制问题已经成为一个热点问题。所以系统固定时间稳定性分析也随之受到广泛关注。传统李亚普诺夫固定时间稳定性定理对于s2中的v(x)只能适用于δ=0的情况,即当δ=0时,对于可以保证v(x)=0成立;与传统的李亚普诺夫固定时间稳定性定理不同,本发明所设计的一种全局固定时间lyapunov稳定性分析方法考虑了不同情况下的δ值,并且后边展示了在δ=0的情况下对系统收敛时间的估计要比传统的lyapunov固定时间稳定性定理中估计的更小,这意味着本发明所提出的实际固定时间稳定性的lyapunov判据的时间估计要比传统的lyapunov固定时间稳定性理论中的时间估计具有更少的保守性。本发明提出了一种全局固定时间lyapunov稳定性分析方法,具有明确的理论意义和较高的实用价值,后面对本方法进行了仿真验证。
技术实现要素:
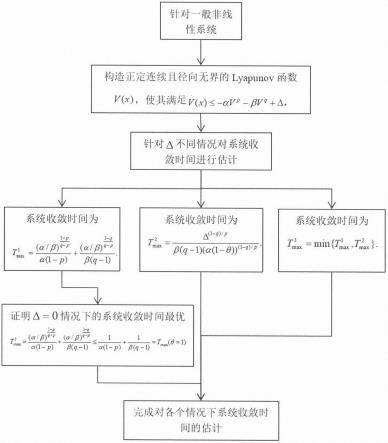
4.根据上述提出的传统lyapunov固定时间稳定性理论所存在的局限性,本发明提出了一种全局固定时间lyapunov稳定性分析方法,本发明考虑了s2中不同情况下的δ值并针对每种情况进行了收敛时间的估计,后边通过严格的数学推导,在δ=0的情况下实现了对系统收敛时间的最优估计。本发明以一般的非线性系统为例进行分析,本发明的技术方案为,一种全局固定时间lyapunov稳定性分析方法,具体步骤如下:
5.一种全局固定时间lyapunov稳定性分析方法,所述方法包括以下步骤:
6.s1、针对一般的非线性系统
[0007][0008]
其中x∈rn是系统状态,f(t,x)为光滑非线性函数;
[0009]
s2、构造正定连续且径向无界的lyapunov函数v(x),使其满足:
[0010][0011]
其中α、β、p、q、δ分别满足α>0,β>0,p<1,q>1,δ≥0;
[0012]
s3、针对三种情况,分别可以对系统收敛时间进行估计。
[0013]
进一步,所述s3步骤的针对δ不同情况对系统收敛时间进行估计;
[0014]
当δ=0时,那么系统的解x(t)就满足对于有v(x)=0成立,其中是不依赖于初始值的,且满足:
[0015][0016]
当δ>0时,那么对于任意常数θ∈[0,1)和系统的解x(t)就满足对于有v(x)≤ε成立,其中是不依赖于初始值的,且满足:
[0017][0018]
当时,系统的解x(t)就满足对于有v(x)≤ε成立,其中是不依赖于初始值的,且满足:
[0019][0020]
本发明与传统的李亚普诺夫固定时间稳定性定理相比,具有如下显著优点:
[0021]
本发明所提出的一种全局固定时间lyapunov稳定性分析方法,相比较于传统的lyapunov固定时间稳定性理论,考虑了不同情况下的δ值,因而应用范围更加广泛。
[0022]
本发明所提出的一种全局固定时间lyapunov稳定性分析方法,展开论证了在δ=0的情况下对系统收敛时间的估计要比传统的lyapunov固定时间稳定性理论中估计的更小,并通过严格数学推导进行了证明,这意味着本发明所提出的实际固定时间稳定性的lyapunov判据的时间估计要比传统的lyapunov固定时间稳定性理论中的时间估计具有更少的保守性,具有明确的理论意义和较高的实用价值。
附图说明
[0023]
图1为本发明一种全局固定时间lyapunov稳定性分析方法流程图。
[0024]
图2为本发明δ=0情况下三种初始状态下系统收敛时间估计仿真效果图。
[0025]
图3为本发明在不同初始状态下系统收敛时间
具体实施方式
[0026]
为了使得本发明的设计思路与证明过程更清晰明了,下面分别从lyapunov函数构造、收敛时间估计等方面展开论述,并结合附图一对设计过程进行详细说明。
[0027]
按照本发明的设计思路,lyapunov固定时间稳定性理论用来判断系统稳定性并进行收敛时间的估计。本发明以一般的非线性系统为例,具体的技术方案是,一种全局固定时间lyapunov稳定性分析方法,具体步骤是:1)针对一般的非线性系统,构造正定连续且径向
无界的lyapunov函数v(x),并使其满足特定条件;2)针对上述构造的lyapunov函数,分别在三种情况下对系统收敛时间进行估计;3)通过具体仿真算例验i证δ=0的情况下,本发明实现了对系统收敛时间的最优估计。本发明主要用于非线性系统固定时间分析以及收敛时间估计。为了达到上述目的,本发明的具体实施步骤如下:
[0028]
s1、针对一般的非线性系统
[0029][0030]
其中x∈rn是系统状态,f(t,x)为光滑非线性函数;
[0031]
s2、构造正定连续且径向无界的lyapunov函数v(x),使其满足:
[0032][0033]
其中α、β、p、q、δ分别满足α>0,β>0,p<1,q>1,δ≥0;
[0034]
s3、针对三种情况,分别可以对系统收敛时间进行估计。
[0035]
进一步,所述s3步骤的针对δ不同情况对系统收敛时间进行估计;
[0036]
当δ=0时,那么系统的解x(t)就满足对于有v(x)=0成立,其中是不依赖于初始值的,且满足:
[0037][0038]
当δ>0时,那么对于任意常数θ∈[0,1)和系统的解x(t)就满足对于有v(x)≤ε成立,其中是不依赖于初始值的,且满足:
[0039][0040]
当时,系统的解x(t)就满足对于有v(x)≤ε成立,其中是不依赖于初始值的,且满足:
[0041][0042]
在步骤s3中,通过数学推导和仿真验证来估计系统收敛时间。
[0043]
首先对δ=0情况下的系统收敛时间进行估计,设θ>0为任意正常数,需要注意的是:
[0044][0045]
通过上述不等式两边进行积分可以得到:
[0046]
β(q-1)t≤v
1-q
(x)-v
1-q
(x0)≤v
1-q
(x)
[0047]
因为1-q<0,所以可以进一步得到:
[0048]
[0049]
根据上述不等式,当时可得v(x)≤θ成立。
[0050]
一旦v(x)≤θ成立,根据有限时间稳定性定理:
[0051][0052]
可以得到在一个有限时间t2内,v(x)=0成立,其中t2满足:
[0053][0054]
因此系统收敛时间可以估计为:
[0055][0056]
需要注意的是当我们去θ=1时可以得到:
[0057][0058]
上式和传统的lyapunov固定时间稳定性理论中系统收敛时间估计一致。
[0059]
同样需要注意,我们通过取就可以得到s3中的
[0060]
接下来证明本发明所提出了要小于传统lyapunov固定时间稳定性理论中系统收敛时间t
max
(θ=1),即
[0061]
首先对t
max
(θ)进行求导可得:
[0062][0063]
需要注意的是,当时,同样需要注意当时,有当时,有所以易得:
[0064][0065]
以上步骤完成了对δ=0情况下的系统收敛时间估计以及收敛时间最优的证明。
[0066]
其次对δ>0情况下的系统收敛时间进行估计,在这里定义然后可以得到:
[0067][0068]
从上式可以看出,当v(x)≥ε时,有成立。这意味着,如果初始条件满足v(x0)≤ε,那么在此之后v(x)将始终保持在集合v(x)≤ε中。接下来,我们只需要证明当v(x0)≥ε时,可以在一个固定的时间内达到集合v(x)≤ε。
[0069]
对66中的不等式两边进行积分可以得到:
[0070]
β(q-1)t≤v
1-q
(x)-v
1-q
(x0)≤v
1-q
(x),其中1-q<0,因此可以得到:
[0071]
[0072]
从上述不等式可以得到:
[0073]
对于有v(x)≤ε成立。
[0074]
以上步骤完成了对δ>0情况下的系统收敛时间估计。
[0075]
最后对情况下的系统收敛时间进行估计,定义常数易得当当时,有成立,这表明如果如果初始条件满足成立且成立,那么v(x)将始终保持在集合中,接下来,我们只需要证明当时,可以在一个固定的时间内达到集合
[0076]
定义一个函数以及那么可以得到的导数:
[0077][0078]
其中所以可以进一步得到:
[0079][0080]
上式类似于δ=0时的情况,针对上式用同样的方法可以得到存在一个时间使得成立。需要注意表示表示任意的满足集合成立。
[0081]
注意当可以得到:
[0082][0083]
这意味着对于任意的有v(x)≤ε成立。同时注意也满足δ>0的情况,这意味着对于任意的有v(x)≤ε成立。
[0084]
因此我们可以得到对于任意的有v(x)≤ε成立。
[0085]
以上步骤完成了对情况下的系统收敛时间估计。
[0086]
根据对以上阶段的分析,我们将对系统收敛时间的估计以如下定理的形式给出:
[0087]
定理1:针对一般的非线性系统
[0088][0089]
其中x∈rn是系统状态,f(t,x)为光滑非线性函数;
[0090]
构造正定连续且径向无界的lyapunov函数v(x),使其满足:
[0091][0092]
其中α、β、p、q、δ分别满足α>0,β>0,p<1,q>1,δ≥0;
[0093]
针对三种情况,分别可以对系统收敛时间进行估计。
[0094]
当δ=0时,那么系统的解x(t)就满足对于有v(x)=0成立,其中是不依赖于初始值的,且满足:
[0095][0096]
当δ>0时,那么对于任意常数θ∈[0,1)和系统的解x(t)就满足对于有v(x)≤ε成立,其中是不依赖于初始值的,且满足:
[0097][0098]
当时,系统的解x(t)就满足对于有v(x)≤ε成立,其中是不依赖于初始值的,且满足:
[0099][0100]
实施例
[0101]
为了验证本发明的有效性,本节针对下面系统在δ=0的情况下进行仿真验证:
[0102][0103]
其中a1,a2,a3,a4为选取的系统参数,分别选取为a1=1,a2=1,a3=0.5,a4=1.5,d=0为系统扰动
[0104]
选取系统的lyapunov函数v(x)为
[0105]
对v(x)进行求导并结合[0102]可以得到
[0106][0107]
由此可以得到对应δ=0情况下,[0032]式中参数分别为p=3/4,q=5/4,系统收敛时间估计三种不同初始状态的收敛时间估计如图2。从图2可以看出,本发明所提出的设计方法在δ=0情况下可以实现在不同初始状态下收敛时间不大于固定时间从图3也可以简单看出,随着初始状态的不断增加,系统收敛时间逐渐趋于平稳,实现了对系统收敛时间的准确估计。
[0108]
本发明提出了一种全局固定时间lyapunov稳定性分析方法。展开论证了在δ=0的情况下对系统收敛时间的估计要比传统的lyapunov固定时间稳定性理论中估计的更小,并通过严格数学推导进行了证明,这意味着本发明所提出的实际固定时间稳定性的lyapunov判据的时间估计要比传统的lyapunov固定时间稳定性理论中的时间估计具有更少的保守性,具有明确的理论意义和较高的实用价值。
[0109]
所应该理解的是,以上所述仅为本发明的一般步骤,并不用于限制本发明,凡是在本发明的精神和原则之内所作的任何修改和等同替换、改进等,均应保安在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1